

BMS高精度算法的关键技术解析与应用分析
描述
一、BMS高精度算法的核心应用场景
BMS高精度算法主要用于以下关键参数的动态估算与控制:
- SOC(荷电状态)估算
通过实时采集电压、电流、温度等参数,结合电池模型动态估算剩余电量。主流算法包括安时积分法+开路电压修正(OCV校正),以及卡尔曼滤波、神经网络等非线性方法。高精度SOC算法可提升电池可用容量(误差从5%降至1%时,可用容量提升8%)。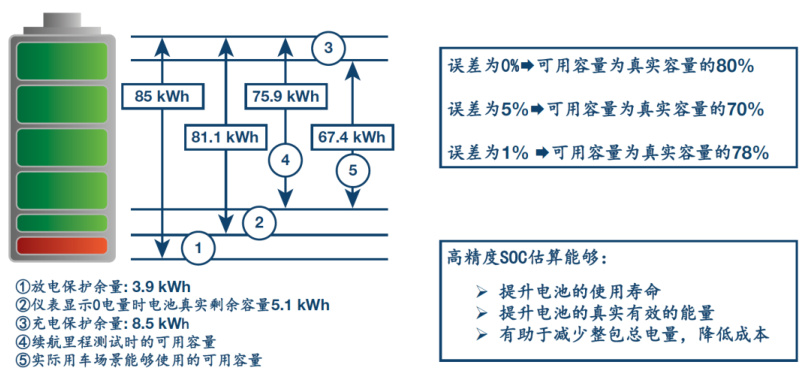
- SOH(健康状态)评估
基于内阻变化、容量衰减等指标,评估电池老化程度。深度学习模型(如CD-Net)通过历史数据训练,实现SOH预测精度达0.04 Ah偏差,而变分贝叶斯自适应UKF算法可动态更新噪声模型,提升鲁棒性。 - SOP(功率状态)预测
结合电池极化特性与温度变化,实时计算最大充放电功率。特斯拉BMS采用多物理场耦合模型,实现动态功率限制。 - 故障诊断与安全保护
通过异常检测算法(如阈值判断、模式识别)识别过压、过流、过温等故障。AI增强型BMS集成故障诊断算法,主动触发保护机制。
二、主流高精度算法类型及性能对比
| 算法类型 | 精度优势 | 实现难点 | 适用场景 |
|---|---|---|---|
| 扩展卡尔曼滤波(EKF) | 线性化处理非线性系统,计算复杂度较低(O(n³)) | 对模型线性化误差敏感,SOC估计误差约0.3-0.67 m | 中低动态工况(如储能系统) |
| 无迹卡尔曼滤波(UKF) | 通过无迹变换(UT)保留三阶非线性特性,SOC误差降至0.27-0.53 m | 计算量约为EKF的3倍,需处理协方差矩阵稳定性问题 | 高动态、强非线性场景(如电动汽车急加速) |
| 粒子滤波(PF) | 适用于非高斯噪声系统,SOC最大误差低于0.72% | 计算复杂度高(达EKF的千倍),需优化粒子退化问题 | 复杂环境(如极端温度、振动条件) |
| 神经网络(NN) | 通过数据驱动建模,可自适应参数变化(如LSTM网络误差<2%) | 依赖海量训练数据,硬件部署资源需求高 | 长周期、多变量耦合场景(如储能系统全生命周期管理) |
典型对比案例 :
- 在匀速直线运动模型中,UKF的RMSE比EKF降低20%。
- 磷酸铁锂电池组SOC估算中,UKF-VBAUKF联合算法误差较EKF减少50%。
三、影响算法性能的关键因素
- 传感器精度
- 电压测量需达±1 mV,电流传感器精度需±0.1% FS。比亚迪采用分流器+24位ADC方案,电流采样同步误差<10 μs。
- 数据采样率
- 电流采样频率需≥10 kHz以捕捉瞬态变化,温度采样可降至1 Hz。特斯拉BMS采用异步采样技术平衡资源消耗。
- 环境干扰
- 温度梯度导致电芯参数漂移(如容量衰减率每℃增加0.5%),需嵌入温度补偿模型。
- 模型准确性
- 二阶RC等效电路模型比一阶模型动态误差降低30%,但参数辨识需HPPC测试支持。
四、不同应用场景的技术需求差异
| 场景维度 | 动力电池(电动汽车) | 储能系统 |
|---|---|---|
| 算法复杂度 | 高(需应对急加速、制动能量回收等瞬态工况) | 中低(侧重长期稳定性) |
| 精度要求 | SOC误差<3%(影响续航里程估算) | SOC误差<2%(保障电网调频精度) |
| 实时性需求 | 控制周期≤10 ms(满足扭矩响应) | 控制周期≥100 ms(适应平缓充放电) |
| 硬件资源限制 | 车规级MCU(如TI TMS570)算力有限,倾向UKF而非PF | 云端协同计算(如力高新能云平台优化模型参数) |
典型案例 :
- 特斯拉Model S BMS采用分布式UKF架构,实现百毫秒级SOC更新。
- 储能系统通过SOC-OCV曲线动态修正算法,误差控制在±1.5%内。
五、技术挑战与发展趋势
- 跨领域算法融合
- 将变分贝叶斯(VB)与UKF结合,实现噪声参数自适应;图神经网络(GNN)用于多电芯耦合关系建模。
- 边缘-云端协同
- 本地BMS执行实时滤波,云端进行长周期SOH预测(如LG Chem ESS方案)。
- 轻量化部署
- 量子化神经网络(QNN)压缩模型至1/10规模,满足车规MCU内存限制。
- 多物理场耦合
- 集成电-热-机械耦合模型(如COMSOL联合仿真),提升极端工况下的预测精度。
六、结论
BMS高精度算法的核心在于动态平衡精度、实时性与资源消耗。未来技术将呈现三大方向:
- 智能化 :AI驱动的自适应算法(如深度强化学习用于SOP优化);
- 协同化 :车-云-端三级计算架构(本地滤波+云端训练);
- 标准化 :建立跨平台算法验证体系(如Autosar兼容BMS软件栈)。
通过持续创新,BMS算法正从"参数估算工具"向"电池数字孪生核心"演进,为新能源产业提供更安全、高效的底层支撑。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
直流充电测试负载关键技术解析2025-03-05 6728
-
B11 BMS分类架构及关键技术from: 中敏老唐2025-05-02 8406
-
嵌入式系统关键技术分析与开发应用2012-08-09 3805
-
CDMA原理与关键技术2012-08-16 3411
-
【视频】智能家居系统关键技术分析与应用2016-02-26 5113
-
基于Microchip的BMS低成本高精度电流检测方案设计2019-07-12 4494
-
什么是5G高频关键技术?2019-08-16 4920
-
POE的关键技术有哪些?2021-06-10 3426
-
嵌入式系统关键技术分析与开发应用是什么2021-12-20 1117
-
视觉导航关键技术及应用2023-09-25 958
-
高精度时差法超声流量计关键技术的研究2017-06-14 1374
-
如何对RTK高精度定位算法进行验证2022-10-11 5762
-
储能BMS的关键技术是什么2024-05-17 2495
-
浅析BMS电池管理系统高精度电流检测2024-07-26 2883
-
高精度石英压力传感器:为国产飞机事故分析提供关键技术支持2026-02-23 2220
全部0条评论

快来发表一下你的评论吧 !
