

LIN作为最后一公里网络成为最佳解决方案原因
描述
当有人说到“本地网络”时,您可能会联想到互联网、局域网(LAN)、Wi-Fi®或以太网。虽然这些技术稳健而广泛,但无论是用于Wi-Fi的无线收发器还是支持在互联网上启用应用程序的协议都需要很高的费用。
像汽车这样高度集成的系统需要支持需要低开销的网络,以便轻松地在车内有限的空间进行路由。随着大量电力节点遍布各地,降低每个节点的成本也是至关重要的。
具体来说,如果在汽车的所有控制单元上启用Wi-Fi网络意味着在每个节点上放置无线电发射机/接收机;不仅价格昂贵,而且电路板上的天线可能相当大。若启用以太网可能不需要每个节点都有无线电收发器,但它至少需要四条线才能实现物理层 - 四条线可同时发送低速发动机控制单元(ECU)数据和高速视频数据。在速度与开销的权衡中,双线控制器区域网络(CAN)和单线本地互连网络(LIN)因而得到发展。
设计人员青睐CAN的高速(>5Mbps)和对传输故障的稳健性。LIN更像是用于将互联网带入农村社区的单线大地回路(SWER)传输线。想要上网,这些农村家庭必须连接到主网络;然而,支持这些家庭的距离和布线成本使传统的传输线在经济上不可行。在图1中,您可以看到一条SWER电力线使用一根电线将远程家庭连接到互联网。SWER传输线的构建覆盖了所有偏远地区。这就是LIN被称为“最后一公里网络”的原因,因为在汽车中,LIN通过单线可以将位于远端的节点连接到主网络。
图 1:SWER传输线通过单线将农村社区连接到网络
汽车内部的典型设置包括带CAN/LIN网关的微控制器。CAN可将消息传递给微控制器,微控制器将这些消息沿LIN总线传递给远程节点。图2描述了该过程,该过程显示了雷达系统如何通过LIN与座椅电机进行通信。对于汽车中的许多模块,LIN是它们与网络的唯一联系人。表1列出了CAN和LIN之间的实现差异。
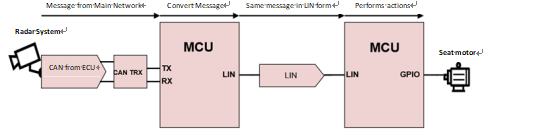
图 2:该图显示了汽车雷达网络的消息通过LIN到达远程座椅电机

表1:CAN和LIN之间的实现差异
正如您所看到的,将CAN引入远程节点是一项非常艰巨的任务,可能会增加项目的成本和复杂性。这正是LIN作为最后一公里网络成为最佳解决方案的原因。集成式LIN收发器(如TI的TLIN1029-Q1和TLIN2029-Q1)使您能够针对所有12V和24V应用充分利用LIN的低成本网络连接。
-
室内定位助你赢在“最后一公里”!2016-05-18 4397
-
工信部推进最后一公里发令枪响 抢跑NGB2010-04-10 1145
-
光电转换器突破光纤到户“最后一公里”2012-11-01 2097
-
MySQL 集群最佳解决方案2017-09-09 1188
-
智能快递柜被认为是解决快递包裹最后一公里最为经济有效的方式2017-12-22 12144
-
京东加大配送机器人投放 解决“最后一公里”问题2018-10-24 5091
-
如何打通物联网应用的最后一公里2019-07-04 1914
-
如何解决AI落地面临的最后一公里2021-01-29 3127
-
配送机器人应势兴起 物流“最后一公里”难题能解吗?2020-11-18 3278
-
广和通智能模组打通“非接触”配送最后一公里信息传输通道2021-03-10 820
-
运用UE电源打通冲牙器产品落地的“最后一公里”2023-02-20 1339
-
TSO.ai芯片测试空间优化方案:打通AI应用“最后一公里”2023-06-08 1331
-
鸿雁iHouseLink,打通智慧生活最后一公里2021-09-07 1426
-
北斗有源终端:打通应急通信‘最后一公里’的关键技术2025-04-02 1141
-
云翎智能低轨卫星通信数据终端:智能铁路通信的最后一公里解决方案2026-04-22 401
全部0条评论

快来发表一下你的评论吧 !
