

ADA4570具有差分输出的集成AMR角度传感器和信号调节器技术手册
描述
概述
ADA4570 是一款各向异性磁阻 (AMR) 传感器,具有集成信号调理放大器和模数转换器 (ADC) 驱动器。ADA4570 产生两个差分模拟输出,指示周围磁场的角位置。
ADA4570 由一个封装内的两个裸片、一个 AMR 传感器和一个固定增益仪器仪表放大器组成。当磁场在 x 轴和 y 轴 (x-y) 平面上旋转时,ADA4570 提供与角度相关的放大差分余弦和正弦输出信号。输出电压范围与电源电压成比例。
传感器包含两个惠斯通电桥,彼此成 45 度角。偶极磁铁的完整旋转会在正弦输出上产生两个周期。因此,根据 SIN 和 COS 差分输出计算出的磁角 (α) 代表了在 0° 至 180° 测量范围内,磁体相对于 ADA4570 的物理方向。在 x-y 平面的均匀场内,ADA4570 的输出信号与 z 方向(气隙)的物理位置无关。
ADA4570 采用 8 引脚 SOIC 封装。
数据表:*附件:ADA4570具有差分输出的集成AMR角度传感器和信号调节器技术手册.pdf
应用
- 绝对位置测量(线性和角度)
- 无刷直流电机控制和定位
- 执行器控制和定位
- 非接触式角度测量和检测
- 磁性角位置检测
特性
- 非接触式角度测量
- 高精度 180 度角传感器
- 典型角度误差为 ±0.1°
- 850 μV rms 低输出噪声
- 正弦和余弦差分输出
- 比率模拟电压输出
- 可忽略的滞后
- 兼容 SAR 或 Σ-Δ ADC
- 温度补偿 AMR 桥
- 工业温度范围:−40°C 至 +125°C
- 汽车温度范围:−40°C 至 +150°C
- 抗电磁干扰
- 故障诊断
- V
DD范围为 2.7 V 至 5.5 V - 30000 rpm 时的最小相位误差为 0.85°
- AEC-Q100 适用于汽车应用
- 单芯片解决方案
- 采用 8 引脚 SOIC 封装
框图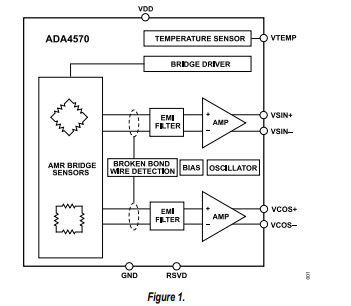
引脚配置描述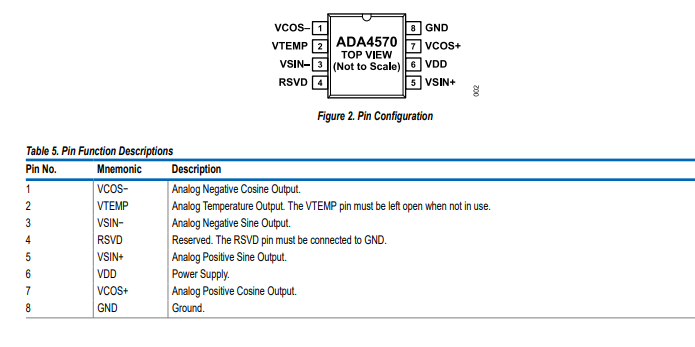
典型性能特征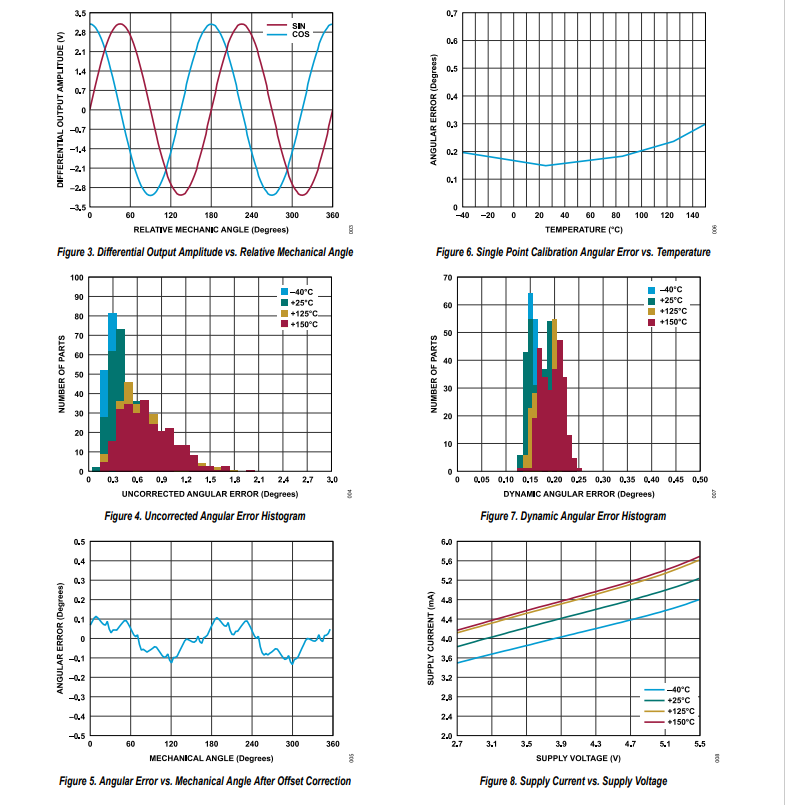
术语
输出信号
AD4570的输出信号VSIN+、VSIN-、VCOS+和VCOS- 以VDID2为共模电压,如图14所示。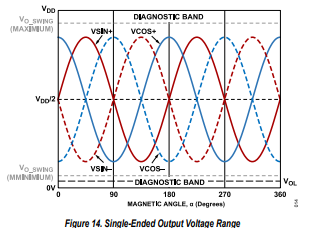
图15中所示的差分信号输出VSIN和VCOS,是通过对相应的正、负SIN和COS单端输出进行采样生成的。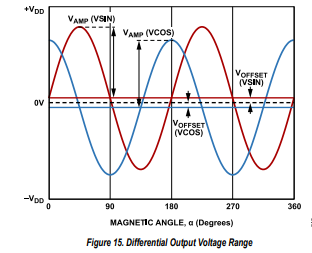
参考位置误差
参考位置误差是传感元件中心与图22所示的标称位置之间的偏差。
参考角度误差
参考角度误差,如图16所示,是传感器与其标称安装位置之间的绝对安装角度误差。0°参考角是引脚2和引脚7之间的直线。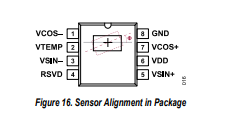
未校正角度误差
未校正角度误差是在未对VSIN和VCOS差分信号应用任何角度校准的情况下,与理想角度的最大偏差。
单点校准角度误差
单点校准角度误差是在25°C下对VSIN和VCOS差分信号应用一次偏移校准后,与理想角度的偏差。
动态角度误差
动态角度误差是对VSIN和VCOS差分信号应用连续偏移和增益校准后,与理想角度的最大偏差。
输出幅度同步
输出幅度同步 (k) 定义为在相同磁场角度下,两个通道的差分幅度之比。当实现幅度同步时,可使用以下等式计算幅度同步:
传播延迟
传播延迟是指VSIN和VCOS差分信号在响应磁场激励时传播所需的时间。
相位误差
相位误差定义为正弦和余弦信号通过放大器时的平均相移。相位误差会增加信号的相对频率裕度。仪表放大器的带宽限制特性如图12所示,典型特性值可作为一阶补偿。
正交误差
正交误差是由于芯片上正弦和余弦传感元件未对准至90°而导致的内部相位误差。
单端输出电压低
单端输出电压低是VSIN-和VCOS- 引脚断开或短路且电源电压低于某个值时的最大电压。
-
ADA4558传感器信号调节器:硬件设计与校准全解析2026-05-28 166
-
Analog Devices Inc. AD4570 AMR磁阻传感器数据手册2025-06-27 1145
-
ADA4558具有LIN接口、非线性校正、温度补偿的桥式传感器信号调节器IC技术手册2025-05-08 1345
-
ADA4571-2双集成式AMR角度传感器和信号调理器技术手册2025-05-07 1577
-
PGA302具有 0-5V 比例输出的传感器信号调节器数据表2024-08-13 479
-
TMAG6181-Q1具有集成圈数计数器的高精度模拟AMR角度传感器数据表2024-08-09 627
-
集成式AMR角度传感器和信号调理器ADA4571应用介绍2023-11-29 660
-
AMR角度传感器2023-11-22 540
-
AMR传感器如何区分北极和南极2022-04-08 2890
-
UG-1047:ADA4571-2集成AMR角度传感器和信号调节器评估板2021-05-25 811
-
UG-1169:ADA4571集成AMR角度传感器和信号调节器的评估2021-05-17 857
-
如何利用信号调节器的抗混淆滤波器来实现混合信号多模态传感器调节2020-04-22 2642
-
【设计技巧】想搞BLDC电机控制,就必须要懂的角度传感器2019-08-10 2541
-
低成本、完备的车身电子差分传感器系统方案2018-10-31 1479
全部0条评论

快来发表一下你的评论吧 !
