

兆易创新人形机器人方案 深度解读
电子说
1.4w人已加入
描述
兆易创新作为国内半导体领域的龙头企业,其产品矩阵已深度渗透人形机器人核心控制系统,形成以 GD32系列MCU为核心,搭配存储芯片、传感器及模拟芯片的全栈解决方案 。以下从型号解析、技术特性及选型策略三个维度展开深度解读:
一、核心产品型号与应用场景
(一)主控MCU:多场景精准适配
- GD32H7系列(高性能计算)
代表型号 :GD32H75E(Cortex-M7内核,600MHz主频)
*附件:GD32H75Exx_Datasheet_Rev1.2.pdf
*附件:GD32H75E_开发手册_Rev1.1.pdf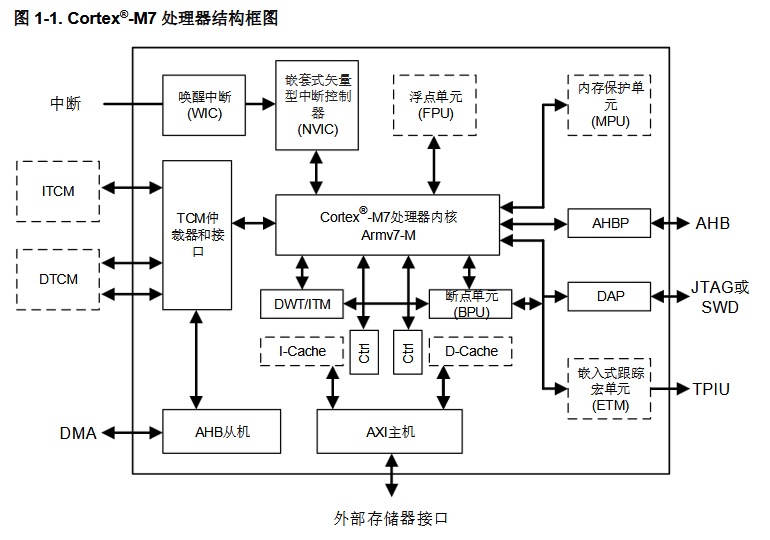
特性 :
- 双发射6级流水线架构+双精度浮点单元(FPU),支持复杂算法(如逆运动学解算、轨迹规划)实时处理,算力达763DMIPS。
- 集成EtherCAT从站控制器+双PHY,实现μs级多轴同步控制,支持多关节数据高速交互(如双臂协作机器人)。
- 4MB Flash/1MB SRAM大容量存储,满足多模态传感器数据缓存需求(如IMU、力觉传感器融合)。
典型应用 :
- 工业级人形机器人关节控制(如特斯拉Optimus仿生关节模组)。
- 医疗康复机器人的高精度运动规划(如帕西尼TORA-ONE灵巧手)。
- GD32G5系列(多电机驱动)
代表型号 :GD32G531(Cortex-M33内核,216MHz主频)
*附件:GD32G553xx_Datasheet_Rev1.3.pdf
*附件:GD32G553_yonghushouce_Rev1.1.pdf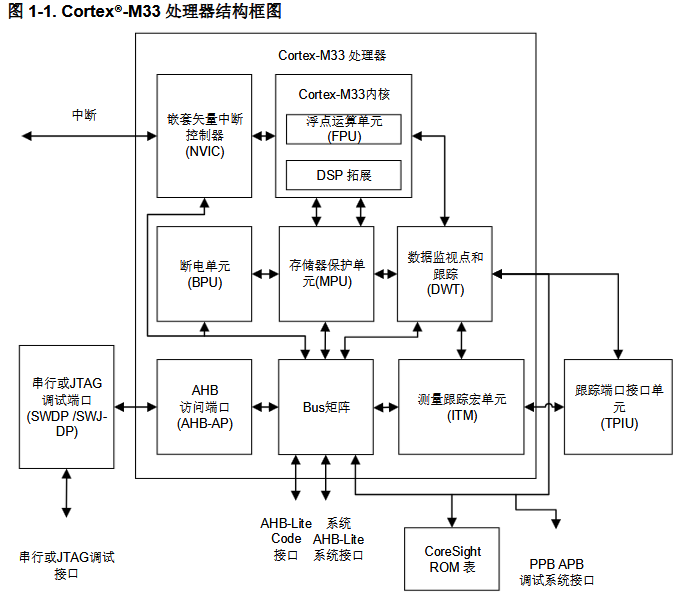
特性 :
- 4通道12位ADC(5.3MSPS)+4通道12位DAC(15MSPS),构建高精度闭环信号链,支持六维力矩传感器实时反馈。
- 16通道高分辨率定时器(145ps精度),生成超高精度PWM波形,适配空心杯电机、无框力矩电机等精密驱动。
- 符合IEC 61508 SIL2功能安全标准,提供完整的Safety Package(含FMEDA报告)。
典型应用 :
- 人形机器人足部伺服系统(如傅利叶智能GR-1髋关节驱动)。
- 服务机器人多轴云台控制(如酒店配送机器人头部转向模块)。
- GD32E23x系列(经济型控制)
- 代表型号 :GD32E230(Cortex-M23内核,72MHz主频)
- 特性 :
- 单周期乘法器+17周期除法器,优化编码器信号处理效率(如增量式编码器计数)。
- 128KB Flash/16KB SRAM,支持低成本场景下的代码存储与数据处理。
- 典型应用 :
- 教育类人形机器人关节驱动(如乐聚5G-A机器人基础运动控制)。
- 消费级机器人简单逻辑控制(如扫地机器人避障算法执行)。
(二)存储与模拟芯片:协同增效
- GD25LX系列SPI NOR Flash
- 特性 :400MB/s超高速吞吐量,支持机器人启动代码快速加载(冷启动时间<10ms)。
- 应用 :存储AI决策模型(如路径规划算法)与实时日志记录。
- GD30DR系列电机驱动芯片
- 特性 :集成PWM控制器、过流保护及栅极驱动,与GD32 MCU无缝协同,缩减30%外围元件。
- 应用 :人形机器人关节模组的一体化驱动方案(如特斯拉Optimus手指关节)。
二、技术特性深度解析
(一)实时性与精度突破
- μs级多轴同步 :GD32H75E的EtherCAT从站控制器支持100Mbps通信速率,配合CAN FD总线,实现多关节动作误差<5μs。
- 亚毫米级控制精度 :GD32H7系列通过硬件三角函数加速器(TMU)优化轨迹插补算法,灵巧手位移精度达0.1mm。
(二)能效与可靠性设计
- 动态功耗管理 :GD32G5系列支持深度睡眠模式(功耗<1μA),配合模拟前端(AFE)实现传感器数据采集与处理的能效比提升40%。
- 工业级抗干扰 :GD32H75E的Flash/SRAM全区域ECC校验,在-40℃~125℃极端环境下数据错误率<1ppm,满足工厂车间等高干扰场景需求。
(三)开发生态与工具链
- 免费商用开发环境 :兆易创新与Segger联合推出Embedded Studio,支持RT-Thread、FreeRTOS等主流OS,代码调试效率提升50%。
- 预集成算法库 :提供电机控制(FOC矢量控制)、传感器融合(卡尔曼滤波)等标准化软件包,缩短开发周期60%。
三、选型策略与应用建议
(一)场景化选型矩阵
| 应用场景 | 核心需求 | 推荐型号 | 关键参数 |
|---|---|---|---|
| 工业级关节控制 | 高精度、多轴同步 | GD32H75E+GD30DR | 600MHz主频,EtherCAT通信,145ps PWM精度 |
| 服务机器人头部驱动 | 轻量化、低功耗 | GD32G531 | 216MHz主频,SIL2功能安全认证 |
| 教育机器人基础运动 | 低成本、易开发 | GD32E230+GD30DR | 72MHz主频,128KB Flash |
| 医疗康复机器人感知 | 多传感器融合、高可靠性 | GD32H75E+GD25LX | 4MB Flash,双精度FPU |
(二)系统设计优化建议
- 分布式控制架构 :采用“主MCU(GD32H75E)+从MCU(GD32G531)”模式,主控制器负责AI决策与全局调度,从控制器执行关节实时控制,降低总线负载。
- 混合信号隔离 :在电机驱动与传感器信号链中加入GD30系列隔离芯片,将共模噪声抑制比提升至120dB,避免电磁干扰(EMI)对控制精度的影响。
- OTA升级方案 :利用GD25LX Flash的高速擦写特性(10万次寿命),结合GD32H75E的QSPI接口,实现机器人固件远程升级,支持差分校验(CRC32)与断点续传。
四、行业趋势与兆易创新布局
随着人形机器人向高精度、智能化、规模化发展,兆易创新已与特斯拉、宇树科技等头部厂商建立合作,2025年目标人形机器人相关订单超10万套。其技术路线聚焦三大方向:
- RISC-V架构拓展 :计划推出基于RISC-V的多核MCU,支持开源生态下的定制化开发,适配低成本人形机器人市场。
- 存算一体技术 :联合光羽芯辰开发高带宽存储方案,将AI推理延迟从毫秒级压缩至微秒级,满足实时环境感知需求。
- 车规级延伸 :GD32A7系列车规MCU通过AEC-Q100认证,可复用至人形机器人电池管理系统(BMS),实现动力与控制的跨领域协同。
兆易创新通过“MCU+存储+模拟”的全栈产品组合,正成为人形机器人核心控制系统的国产替代标杆。其技术优势与生态布局,将有力推动我国机器人产业从“硬件组装”向“自主可控”的转型升级。
审核编辑 黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
大厂入局人形机器人:NXP、瑞萨和兆易创新推出哪些核心MCU方案?2026-05-19 13406
-
使用恩智浦MCU实现创新人形机器人灵巧手解决方案2026-02-02 2534
-
深度解读人形机器人电感产品需求及应用选型技巧2025-10-25 1607
-
2025迎人形机器人量产拐点 兆易创新全栈芯片已就位2025-09-26 1099
-
人形机器人马拉松背后的思考,兆易创新如何赋能机器人产业2025-05-21 1190
-
MCU+存储+模拟,兆易创新为人形机器人提供全栈支持2025-05-07 3170
-
伺服电动缸在人形机器人中的应用2025-02-06 2320
-
兆易创新亮相2024地平线地瓜机器人开发者日2024-10-17 2382
-
从市场角度简要解读“人形机器人”2024-06-29 1405
-
华为云在人形机器人领域展开合作2024-03-25 2135
-
兆易创新助力智能机器人创新研讨会成功举办2024-03-07 2056
-
高动态人形机器人“夸父”通过OpenHarmony 3.2 Release版本兼容性测评2023-12-20 1932
-
为什么人形机器人更讨人喜欢?2016-05-12 5368
全部0条评论

快来发表一下你的评论吧 !
