

ADXRS649快速启动、具有振动抑制特性的±20,000°/s偏航角速度陀螺仪技术手册
描述
概述
ADXRS64x系列低噪声、具有振动抑制特性的偏航角速度陀螺仪可直接取代现有设计中的ADXRS62x系列,实现性能升级。
数据表:*附件:ADXRS649快速启动、具有振动抑制特性的±20,000°s偏航角速度陀螺仪技术手.pdf
ADXRS649与ADXRS62x系列引脚兼容、封装兼容,提供测量范围达±20,000°/sec的最高旋转速率检测,3毫秒(ms)快速启动时间可实现迅捷的周期供电。增加一个外部电阻,测量范围可扩大至±50,000°/sec。它非常适合需要极宽测量范围的应用。
ADXRS649是一款功能完备、成本低廉的角速率传感器(陀螺仪),采用ADI公司已取得专利的大规模BiMOS表面微加工工艺制造,单芯片上实现了完整的陀螺仪。ADXRS649采用先进的差分四传感器设计,可抑制线性加速度的影响,能够在恶劣的冲击和振动环境中执行速率检测。
输出信号RATEOUT (B1, A2)是电压值,与围绕封装上表面法线轴转动的角速率成比例。输出与所提供的基准电源成比率。使用一个外部电容设置带宽。通过增加一个外部电阻,可将测量范围扩大至±50,000°/s。
该器件耗电量低(3.5 mA),非常省电。启动时间超快(3 ms),陀螺仪可快速完成周期供电。以10 SPS(每秒采样数)的速率工作时,一对CR2032纽扣电池可以使ADXRS649持续工作三个月。
该器件提供温度输出,用于补偿技术。两路数字自测输入通过机电方式激励传感器,以测试传感器和信号调理电路是否正常工作。ADXRS649提供7 mm × 7 mm × 3 mm CBGA芯片级封装。
应用
- 运动设备
- 工业应用
- 形状稳定
- 高速转速测定
特性
- 可在宽频率范围内提供高振动抑制特性
- 超快启动时间:3 ms
- 测量范围可扩大至±50,000°/s
- 抗冲击能力:10,000 g
- 输出与基准电源成比率
- 5 V单电源供电
- Z轴(偏航角速度)响应
- 工作温度范围:−40°C至+105°C
- 根据数字命令执行自测
- 超小尺寸、重量轻(<0.15 cc、<0.5克)
- 温度传感器输出
- 符合RoHS标准
框图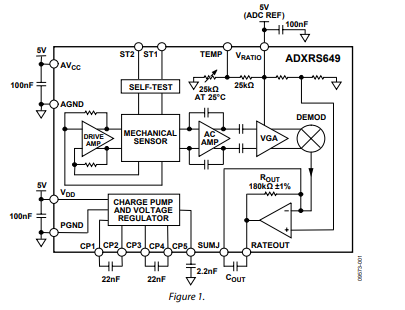
引脚配置描述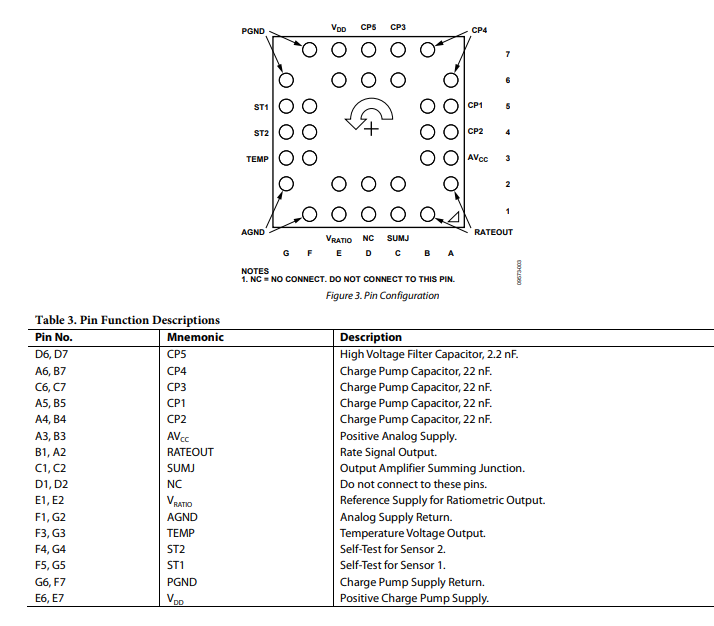
典型性能特征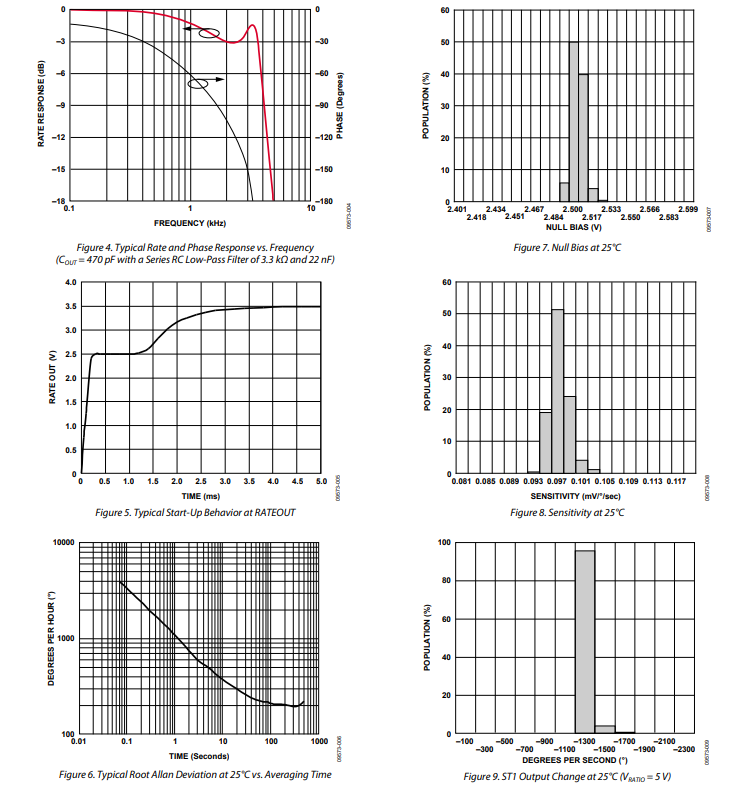
工作原理
ADXRS649基于谐振陀螺仪原理工作。图18展示了四个多晶硅传感结构中其中一个的简化示意图。每个传感结构都包含一个抖动框架,该框架通过静电驱动至谐振状态,产生必要的速度分量,以便在受到角速率作用时生成科里奥利力。ADXRS649旨在感测x轴(偏航)角速率。
当传感结构受到角速率作用时,产生的科里奥利力会耦合到外部传感框架,该框架包含置于固定拾取指状结构之间的可移动指状结构,从而形成一个电容式拾取结构来感测科里奥利运动。产生的信号会传输至一系列增益和解调级,以产生电角速率输出。四重对称设计可抑制线性和角加速度,包括外部重力加速度,这是通过将四个传感结构机械耦合实现的,使得外部重力加速度以共模信号的形式出现,而这些共模信号可通过ADXRS649中采用的全差分架构予以消除。
静电谐振器工作需要13V至15V电压。由于大多数应用通常仅提供5V电压,所以内置了一个电荷泵。如果有外部13V至15V电源可用,CP1至CP4上的两个电容可被省略,并且该电源可以连接到CP5(引脚D6、引脚D7)。在ADXRS649通电时,请勿将CP5接地。在某些情况下,电荷泵可能无法启动,但在不断开ADXRS649电源的情况下移除接地后,它可能会启动。
设置带宽
外部电容C_{OUT} 与片上电阻R_{OUT} 配合使用,构成一个低通滤波器,用于限制ADXRS649速率响应的带宽。由R_{OUT} 和C_{OUT} 设置的 - 3dB频率为:
该频率可精确控制,因为R_{OUT} 在制造过程中已被修整为180 kΩ ± 1% 。在RATEOUT引脚(B1、A2)和SUMJ引脚(C1、C2)之间应用的任何外部电阻R_{EXT} 会导致:
通常,除了低通滤波器之外,还会添加一个额外的滤波器(无论是硬件还是软件),以衰减来自解调的18kHz谐振频率处的噪声尖峰。推荐使用由一个3.3kΩ 串联电阻和22nF 并联电容(2.2kHz极点)组成的RC输出滤波器。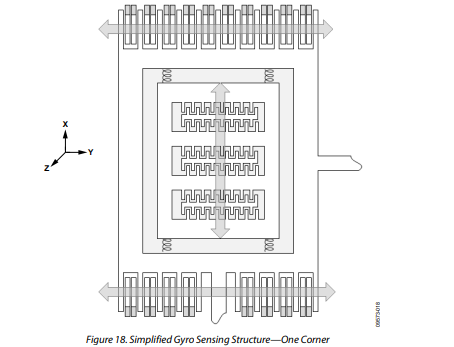
-
ADXRS646具有高稳定性、低噪声和振动抑制特性的偏航角速度陀螺仪技术手册2025-05-07 1598
-
一款偏航角速度陀螺仪ADIS16060介绍2023-04-18 2252
-
ADXRS622:±250°/秒偏航速率陀螺仪数据表2021-05-08 816
-
ADXRS623:±150°/秒偏航速率陀螺仪2021-04-22 801
-
ADXRS652: ±250°/s偏航角速度陀螺仪2021-03-21 782
-
ADXRS646: 具有高稳定性、低噪声和振动抑制特性的航向角速度陀螺仪2021-03-19 942
-
EVAL-ADXRS649Z可快速评估ADXRS649角速率传感器(陀螺仪)的性能2019-07-15 1733
-
ADXRS649 快速启动、具有振动抑制特性的±20,000°/s偏航角速度陀螺仪2019-02-15 789
-
陀螺仪传感方案ADXRS6 242018-11-02 1971
-
MEMS陀螺仪应用案例:利用ADI ADXRS450检测角速度2012-12-13 8329
-
ADXRS649具有振动抑制特性的偏航角速度陀螺仪2012-06-13 2699
全部0条评论

快来发表一下你的评论吧 !
