

ADXRS450高抗振性数字陀螺仪技术手册
描述
概述
ADXRS450是一款角速率传感器(陀螺仪),主要用于工业、医疗、仪器仪表、稳定和其它高性能应用。它采用先进的差分四传感器设计,可抑制线性加速度的影响,从而能在有冲击和振动的极恶劣环境中工作。
ADXRS450采用内部连续自测架构。机电系统的完整性通过以下方法来检查:对检测结构施加一个高频静电力,以便产生一个速率信号,将该速率信号与基带速率数据区分开来,并进行内部分析。
ADXRS450能够检测高达±300°/s的角速率。角速率数据以16位字的形式提供,作为32位SPI消息的一部分。
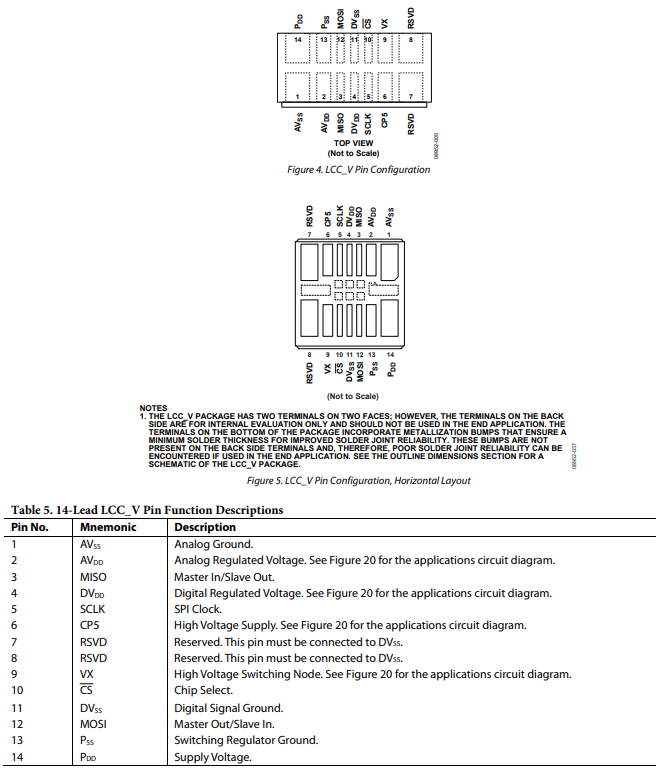
ADXRS450提供16引脚空腔塑封SOIC (SOIC_CAV)和SMT兼容垂直贴装(LCC_V)两种封装,能够在3.3 V至5 V的宽电压范围内和−40°C至+105°C的温度范围内工作。
数据表:*附件:ADXRS450高抗振性数字陀螺仪技术手册.pdf
应用
- 旋转检测医疗应用
- 旋转检测工业和仪器仪表
- 高性能平台稳定
特性
在单芯片上实现完整的角速度陀螺仪
±300°/秒角速率检测
可在宽频率范围内提供高振动抑制特性
出色的零点偏置稳定性:25°/小时
抗冲击能力:2000 g
16位数据字SPI数字输出
低噪声和低功耗
工作电压范围:3.3 V至5 V
工作温度范围:-40°C至+105°C
超小、轻便、RoHS兼容
两种封装选择:
- 低成本SOIC_CAV封装可提供偏航角速度(Z轴)响应
- 创新型陶瓷垂直贴装封装适合于俯仰、滚动、偏航响应
框图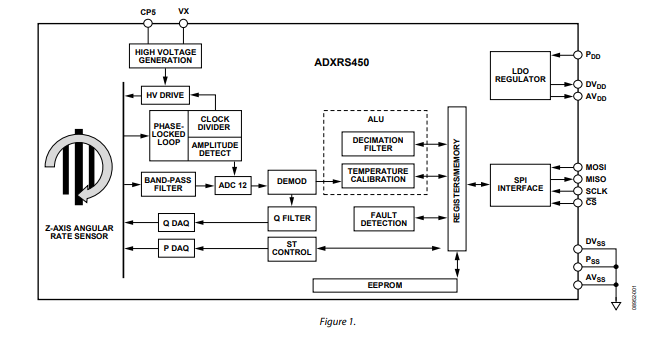
引脚配置描述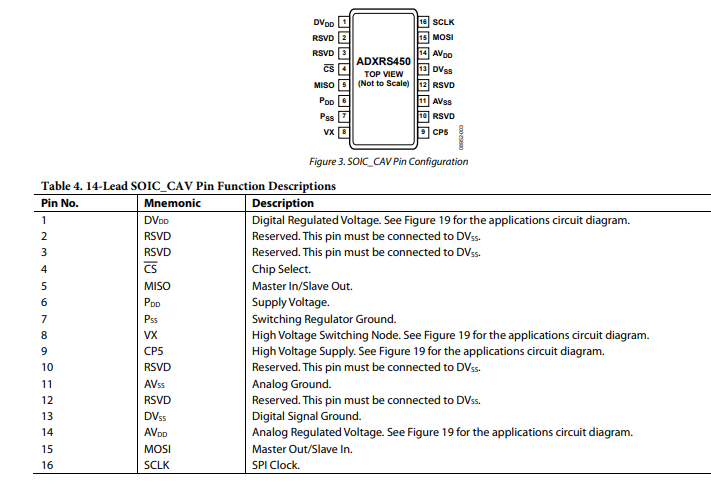
典型性能特征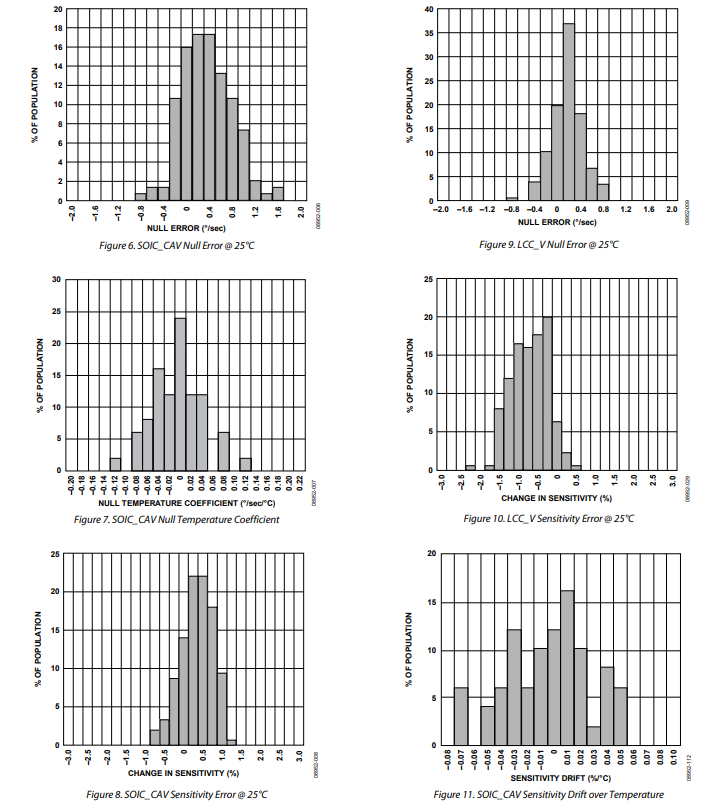
工作原理
ADXRS450基于谐振陀螺仪原理工作。图16展示了四个多晶硅传感结构中其中一个的简化示意图。每个传感结构都包含一个抖动框架,该框架通过静电驱动至谐振状态,产生必要的速度分量,以便在受到角速率作用时生成科里奥利力。ADXRS450旨在感测z轴(偏航)角速率;在SOIC_CAV封装中,垂直安装封装(LCC_V)可使器件定向,以便在同一块印刷电路板(PCB)上也能感测俯仰或滚动角速率。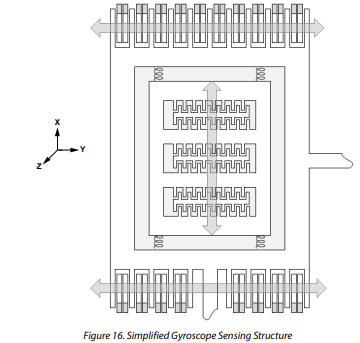
当传感结构受到角速率作用时,产生的科里奥利力会耦合到外部传感框架,该框架包含置于固定拾取指状结构之间的可移动指状结构,从而形成一个电容式拾取结构来感测科里奥利运动。产生的信号会传输至一系列增益和解调级,以产生电角速率输出。四重对称设计可抑制线性和角加速度,包括外部重力加速度和振动,这是通过将四个传感结构机械耦合实现的,使得外部重力加速度以共模信号的形式出现,而这些共模信号可通过ADXRS450中采用的全差分架构予以消除。
谐振器工作通常需要22.5V电压。由于大多数应用通常仅提供5V电压,所以内置了一个开关稳压器。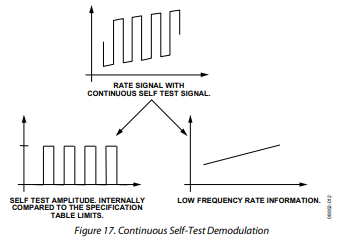
连续自测试
ADXRS450陀螺仪采用完整的机电自测试。向陀螺仪框架施加一个静电力,导致电容指状结构发生偏转。这种偏转与作为外部速率输入时发生的偏转完全等效。来自梁结构的输出通过整个信号链进行处理,提供电和机械组件的真实速率输出信号,从而实现全面覆盖。
在器件的输出带宽之上,机电自测试会连续进行。自测试程序会生成等效的正和负速率检测。此信息随后会经过滤波,从而不会对解调后的速率输出产生总体影响。
正和负自测试偏转之间的差异幅度会以2Hz进行滤波,并持续监测,与硬编码的自测试限制(见表1)进行比较。如果测量幅度超出这些限制,根据自测试错误的幅度,会触发两种错误情况之一:
- 对于较不严重的自测试错误幅度,故障寄存器的CST位会被置位;不过,传感器数据响应中的状态位(ST[1:0])会保持为01,表示传感器数据有效。
- 对于更严重的自测试错误,故障寄存器的CST位会被置位,并且传感器数据响应中的状态位(ST[1:0])会被设置为00,表示传感器数据无效。
表1列出了这两种故障情况的阈值。如果需要,用户可以通过发出读取命令(地址为0x04)来访问自测试信息。有关错误报告的更多信息,请参见SPI通信协议部分。
-
ADXS450陀螺仪的ADC采样频率是多少?2023-12-29 896
-
有什么办法使ADXRS450处于节能状态?2023-12-28 451
-
UG-831:评估ADXRS645高温抑振±2000°/秒陀螺仪2021-05-15 742
-
用于EVAL-MST-ISEB的ADXRS450评估软件2021-03-22 762
-
ADXRS450参考代码2021-02-01 640
-
ADXRS450 Evaluation Software for EVAL-MST-ISEB2021-01-27 726
-
两款同类MEMS陀螺仪产品的性能分析2019-07-16 4208
-
ADXRS450角速率传感器的性能特点及应用范围2019-07-09 4340
-
ADXRS450 ±300°/s高抗振性数字陀螺仪2019-02-15 639
-
ADXRS450:用2.5v的电压给陀螺供电时陀螺就有返回数2018-08-22 1443
-
MEMS陀螺仪应用案例:利用ADI ADXRS450检测角速度2012-12-13 8291
-
ADXRS450高性能数字输出陀螺仪2011-10-17 1517
-
基于ADXRS624设计的陀螺仪传感技术2010-07-05 1564
-
ADI公司的第四代高性能低功耗MEMS陀螺仪支持恶劣工业环境2010-05-12 1179
全部0条评论

快来发表一下你的评论吧 !
