

单片机之间UART通信示意图分享
电子说
描述
单片机简介
单片机是一种集成电路芯片。它采用超大规模技术将具有数据处理能力的微处理器(CPU)、存储器(含程序存储器ROM和数据存储器RAM)、输入、输出接口电路(I/O接口)集成在同一块芯片上,构成一个即小巧又很完善的计算机硬件系统,在单片机程序的控制下能准确、迅速、高效地完成程序设计者事先规定的任务。所以说,一片单片机芯片就具有了组成计算机的全部功能。
单片机串口通信有哪些
1、SPI
SPI允许单片机和外围设备或者单片机之间高速同步数据传输,SPI可以有主机和从机模式之选,通信的主从机之间通过移位寄存器同时交换数据。目前自己用的以主机模式居多。SPI需要四线:SS,MISO,MOSI,SCK。
通信过程:在设置好SPI的工作模式:包括SCK频率(数据传输速率),工作速度,主从模式,以及数据接收发送对应的时钟极性。在主模式下,将SS拉低表示通信的开始,然后通过向SPI数据寄存器中写入一字节的数据后自动启动时钟SCK开始进行一次通信,通信完成后会产生相应的中断标志,标志一个字节数据的传送完成。通信完成后将SS脚拉高,表示通信过程已经结束。
注意SS引脚的设置:当设置为从机模式时,SS引脚应设置为输入,拉低的时候SPI才能起作用,拉高的话是消极的SPI模式;在主机模式下,SS引脚可以设置,一般应设置为输出,如果设置为输入的话应保持为高,否则将不能进行正常的主机模式操作。
2、USART
USART的操作比较简单,主要是设置波特率,数据格式,以及中断允许位等,值得至于的是其USART IN SPI MODE,在SPI模式下的USART的操作跟SPI操作差不多,主要是Clock的设置,然后发送数据还是通过USART的中断进行
3、I2C
I2C接口是简单强大的通信接口,只需要两根双向总线(时钟和数据线),SCL和SDA,即可实现一个主机和最多128个从机进行通信。模拟I2C接口的过程:启动I2C,一般是在SCL为高时将SDA拉低启动数据发送,SDA只有在SCL为低时才能拉高拉低有效,在SCL为高时拉高拉低SDA只是用于停止启动I2C通信
两个单片机之间UART串口通信
相信很多人都对单片机与计算机或者芯片通信时,RXD与TXD如何连接比较困惑。因为在一些电路图中,有的是直连接法,有的是交叉接法,让人有点摸不着头脑。
首先需要明白两个概念,就是DTE和DCE。DTE是指数据终端设备,典型的DTE就是计算机和单片机。DCE是指数据通信设备,典型的DCE就是MODEM。RS232串口标准中的RXD和TXD都是站在DTE立场上的,而不是DCE。明白了这一点,再讲下面的接线方法,就很好理解了。
单片机与计算机进行串口通信时,单片机的RXD接计算机的TXD,单片机的TXD接计算机的RXD。
(1)使用串口直通线。
设计电路时,单片机的RXD连接电路板DB9的TXD,单片机的TXD连接电路板DB9的RXD,具体实现可在232电平转换芯片处反接。
(2)使用串口交叉线。
设计电路时,因为串口线已做交叉,单片机的RXD连接电路板DB9的RXD,单片机的TXD连接电路板DB9的TXD,均直连即可。
这就可以解释为什么有的电路中使用直连接法,有的电路中使用交叉接法,就是因为使用的串口线不同。
单片机之间UART通信示意图分享
通信按照基本类型可以分为并行通信和串行通信。并行通信时数据的各个位同时传送,可以实现字节为单位通信,但是通信线多占用资源多,成本高。比如我们前边用到的 P0 = 0xFE;一次给 P0 的 8 个 IO 口分别赋值,同时进行信号输出,类似于有 8 个车道同时可以过去 8 辆车一样,这种形式就是并行的,我们习惯上还称 P0、P1、P2 和 P3 为 51 单片机的 4 组并行总线。
而串行通信,就如同一条车道,一次只能一辆车过去,如果一个 0xFE 这样一个字节的数据要传输过去的话,假如低位在前高位在后的话,那发送方式就是 0-1-1-1-1-1-1-1-1,一位一位的发送出去的,要发送 8 次才能发送完一个字节。
STC89C52 有两个引脚是专门用来做 UART 串行通信的,一个是 P3.0 一个是 P3.1,它们还分别有另外的名字叫做 RXD 和 TXD,由它们组成的通信接口就叫做串行接口,简称串口。用两个单片机进行 UART 串口通信,基本的演示图如图 11-1 所示。
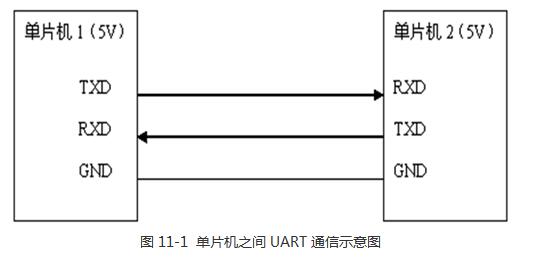
图中,GND 表示单片机系统电源的参考地,TXD 是串行发送引脚,RXD 是串行接收引脚。两个单片机之间要通信,首先电源基准得一样,所以我们要把两个单片机的 GND 相互连接起来,然后单片机 1 的 TXD 引脚接到单片机 2 的 RXD 引脚上,即此路为单片机 1 发送而单片机 2 接收的通道,单片机 1 的 RXD 引脚接到单片机 2 的 TXD 引脚上,即此路为单片机 2 发送而单片机 1 接收的通道。这个示意图就体现了两个单片机相互收发信息的过程。
当单片机 1 想给单片机 2 发送数据时,比如发送一个 0xE4 这个数据,用二进制形式表示就是 0b11100100,在 UART 通信过程中,是低位先发,高位后发的原则,那么就让 TXD首先拉低电平,持续一段时间,发送一位 0,然后继续拉低,再持续一段时间,又发送了一位 0,然后拉高电平,持续一段时间,发了一位 1„„一直到把 8 位二进制数字 0b11100100全部发送完毕。这里就涉及到了一个问题,就是持续的这“一段时间”到底是多久?由此便引入了通信中的一个重要概念——波特率,也叫做比特率。
波特率就是发送二进制数据位的速率,习惯上用 baud 表示,即我们发送一位二进制数据的持续时间=1/baud。在通信之前,单片机 1 和单片机 2 首先都要明确的约定好它们之间的通信波特率,必须保持一致,收发双方才能正常实现通信,这一点大家一定要记清楚。
约定好速度后,我们还要考虑第二个问题,数据什么时候是起始,什么时候是结束呢?
不管是提前接收还是延迟接收,数据都会接收错误。在 UART 通信的时候,一个字节是 8 位,规定当没有通信信号发生时,通信线路保持高电平,当要发送数据之前,先发一位 0 表示起始位,然后发送 8 位数据位,数据位是先低后高的顺序,数据位发完后再发一位 1 表示停止位。这样本来要发送一个字节的 8 位数据,而实际上我们一共发送了 10 位,多出来的两位其中一位起始位,一位停止位。而接收方呢,原本一直保持的高电平,一旦检测到了一位低电平,那就知道了要开始准备接收数据了,接收到 8 位数据位后,然后检测到停止位,再准备下一个数据的接收。我们图示看一下,如图 11-2 所示。
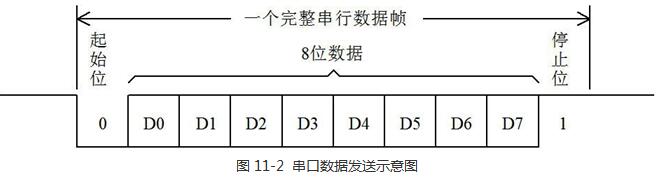
图 11-2 串口数据发送示意图,实际上是一个时域示意图,就是信号随着时间变化的对应关系。比如在单片机的发送引脚上,左边的是先发生的,右边的是后发生的,数据位的切换时间就是波特率分之一秒,如果能够理解时域的概念,后边很多通信的时序图就很容易理解了。
-
9FGV1004 参考示意图2023-07-07 587
-
9DBL0455 参考示意图2023-07-05 734
-
9FGV1006 参考示意图2023-05-19 695
-
9ZX21901 参考示意图2023-03-21 582
-
5X35023 参考示意图2023-03-14 617
-
螺栓示意图下载2022-01-10 1145
-
单片机的模块功能示意图2016-02-19 1205
-
光电开关检测示意图2009-12-16 1105
-
混合动力汽车示意图2009-11-21 2352
-
失会聚示意图2009-07-31 1326
-
飞机示意图2009-05-26 2566
-
电脑键盘示意图,计算机键盘示意图2009-03-10 128131
-
氯离子结构示意图和钠离子结构示意图2008-05-28 57089
全部0条评论

快来发表一下你的评论吧 !
