

基于LockAI视觉识别模块:C++使用图像的统计信息
描述
在图像处理中,统计信息可以帮助我们了解图像的特性,例如区域内的像素分布、颜色转换以及特定区域的分析。本文将介绍基于LockAI视觉识别模块如何提取兴趣区域(ROI)、转换颜色通道、计算均值和标准差,以及查找最小值和最大值,并通过一个综合示例展示其实际应用。
1.基本知识讲解
1.1 图像的兴趣区域(ROI)
ROI(Region of Interest):指图像中感兴趣的区域,通常用于局部分析或处理。
提取 ROI 的目的是减少数据量并专注于特定区域,从而提高处理效率。
1.2 颜色空间转换
不同的颜色空间适用于不同的任务。例如:
灰度图:简化图像处理,常用于边缘检测等任务。
HSV:用于颜色分割任务,分离色调、饱和度和亮度。
LAB:更接近人类视觉感知,适合颜色校正。
1.3 图像统计信息
均值和标准差:反映图像整体亮度及亮度变化情况。
最小值和最大值:帮助识别图像中的极端像素值及其位置。
2.API文档
2.1 头文件
#include
2.2 提取兴趣区域(ROI)
cv::Matroi=image(cv::Rect(x, y, w, h));
功能:
从图像中提取一个矩形区域。
参数:
image:输入图像(cv::Mat类型)。
(x, y):ROI左上角的坐标。
(w, h):ROI的宽高。
返回值:
提取出的ROI图像(cv::Mat类型)。
2.3 转换为灰度图
cv::cvtColor(image, grayImage, cv::COLOR_BGR2GRAY);
功能:
将彩色图像转换为灰度图像。
参数:
image:输入图像(cv::Mat类型)。
grayImage:输出灰度图像(cv::Mat类型)。
COLOR_BGR2GRAY:将BGR图像转换为灰度图像。
返回值:
无。最后结果储存在grayImage中。注意: 其中根据不同的转换要求可以使用不同的转换代码,具体如下所示。
| 转换方向 | 转换代码 | 描述 |
|---|---|---|
| BGR Grayscale | cv::COLOR_BGR2GRAY | 将 BGR 图像转换为灰度图像 |
| cv::COLOR_GRAY2BGR | 将灰度图像转换为 BGR 图像 | |
| BGR RGB | cv::COLOR_BGR2RGB | 将 BGR 图像转换为 RGB 图像 |
| cv::COLOR_RGB2BGR | 将 RGB 图像转换为 BGR 图像 | |
| BGR HSV | cv::COLOR_BGR2HSV | 将 BGR 图像转换为 HSV 图像 |
| cv::COLOR_HSV2BGR | 将 HSV 图像转换为 BGR 图像 | |
| BGR LAB | cv::COLOR_BGR2LAB | 将 BGR 图像转换为 LAB 图像 |
| cv::COLOR_Lab2BGR | 将 LAB 图像转换为 BGR 图像 | |
| BGR YUV | cv::COLOR_BGR2YUV | 将 BGR 图像转换为 YUV 图像 |
| cv::COLOR_YUV2BGR | 将 YUV 图像转换为 BGR 图像 | |
| BGR XYZ | cv::COLOR_BGR2XYZ | 将 BGR 图像转换为 CIE XYZ 图像 |
| cv::COLOR_XYZ2BGR | 将 CIE XYZ 图像转换为 BGR 图像 | |
| BGR YCrCb | cv::COLOR_BGR2YCrCb | 将 BGR 图像转换为 YCrCb 图像 |
| cv::COLOR_YCrCb2BGR | 将 YCrCb 图像转换为 BGR 图像 | |
| BGR HLS | cv::COLOR_BGR2HLS | 将 BGR 图像转换为 HLS 图像 |
| cv::COLOR_HLS2BGR | 将 HLS 图像转换为 BGR 图像 | |
| BGR Luv | cv::COLOR_BGR2Luv | 将 BGR 图像转换为 Luv 图像 |
| cv::COLOR_Luv2BGR | 将 Luv 图像转换为 BGR 图像 | |
| BGR Bayer | cv::COLOR_BayerBG2BGR | 将 Bayer 格式图像转换为 BGR 图像 |
| BGR RGBA | cv::COLOR_BGR2RGBA | 将 BGR 图像转换为 RGBA 图像(添加 Alpha 通道) |
| cv::COLOR_RGBA2BGR | 将 RGBA 图像转换为 BGR 图像 |
2.4 计算均值和标准差:
cv::meanStdDev(src, mean, stddev);
功能:
计算图像或矩阵元素的平均值和标准偏差。
参数:
src:输入图像或矩阵(cv::Mat类型)。
mean:输出平均值(cv::Scalar类型)。
stddev:输出标准偏差(cv::Scalar类型)。
返回值:
无。最后结果储存在mean和stddev中。
2.5 计算最小值和最大值:
cv::minMaxLoc(src, &minVal, &maxVal, &minLoc, &maxLoc);
功能:
在输入图像或矩阵中找到最小值和最大值。
参数:
src:输入图像或矩阵(cv::Mat类型)。
minVal:输出最小值(double类型)。
maxVal:输出最大值(double类型)。
minLoc:输出最小值对应的位置(cv::Point类型)。
maxLoc:输出最大值对应的位置(cv::Point类型)。
返回值:
无。最后结果储存在minVal、maxVal、minLoc和maxLoc中。
3.综合代码解析
3.1 流程图
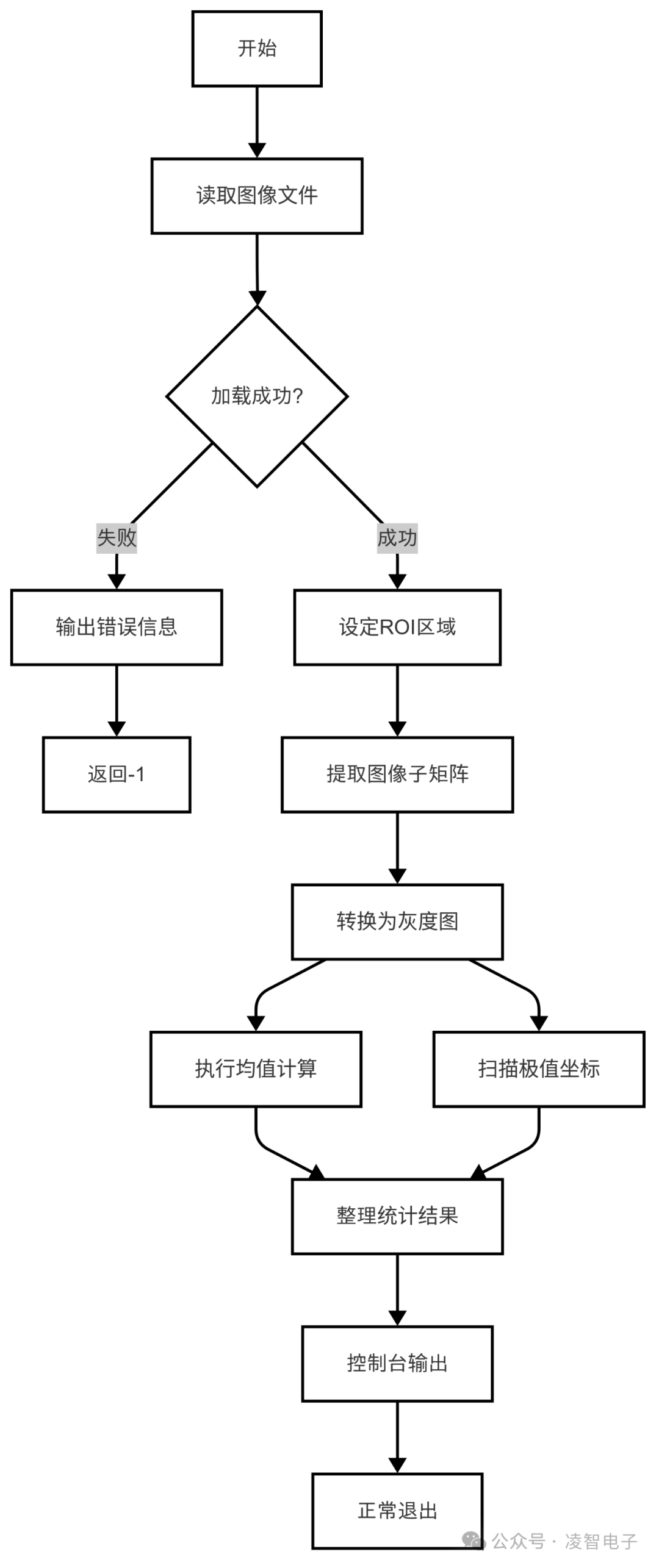
3.2 代码解释
读取图像文件
cv::Matimage=cv::imread("2.jpg");
if (image.empty()) {
std::cerr<<"Error: Could not open image!"<<std::endl;
return-1;
}
设定ROI区域
// 定义 ROI 并提取
cv::RectroiRect(50, 50, 200, 200);
cv::Matroi=image(roiRect);
转换为灰度图
cv::MatgrayRoi;
cv::cvtColor(roi, grayRoi, cv::COLOR_BGR2GRAY);
均值和标准差计算
// 计算均值和标准差
cv::Scalarmean, stddev;
cv::meanStdDev(grayRoi, mean, stddev);
3.3 代码实现
#include
#include
intmain()
{
// 读取图像
cv::Matimage=cv::imread("example.jpg");
if (image.empty())
{
std::cerr<<"Error: Could not open image!"<<std::endl;
return-1;
}
// 定义 ROI 并提取
cv::RectroiRect(50, 50, 200, 200);
cv::Matroi=image(roiRect);
// 转换为灰度图
cv::MatgrayRoi;
cv::cvtColor(roi, grayRoi, cv::COLOR_BGR2GRAY);
// 计算均值和标准差
cv::Scalarmean, stddev;
cv::meanStdDev(grayRoi, mean, stddev);
// 计算最小值和最大值
doubleminVal, maxVal;
cv::PointminLoc, maxLoc;
cv::minMaxLoc(grayRoi, &minVal, &maxVal, &minLoc, &maxLoc);
// 输出结果
std::cout<<"Mean: "<<mean[0] <<std::endl;
std::cout<<"Standard Deviation: "<<stddev[0] <<std::endl;
std::cout<<"Min Value: "<<minVal<<" at "<<minLoc<<std::endl;
std::cout<<"Max Value: "<<maxVal<<" at "<<maxLoc<<std::endl;
return0;
}
4.编译过程
4.1 编译环境搭建
请确保你已经按照 开发环境搭建指南 正确配置了开发环境。
同时以正确连接开发板。
4.2 Cmake介绍
# CMake最低版本要求
cmake_minimum_required(VERSION 3.10)
project(test-Image-information-statistics)
set(CMAKE_CXX_STANDARD 17)
set(CMAKE_CXX_STANDARD_REQUIRED ON)
# 定义项目根目录路径
set(PROJECT_ROOT_PATH "${CMAKE_CURRENT_SOURCE_DIR}/../..")
message("PROJECT_ROOT_PATH = "${PROJECT_ROOT_PATH})
include("${PROJECT_ROOT_PATH}/toolchains/arm-rockchip830-linux-uclibcgnueabihf.toolchain.cmake")
# 定义 OpenCV SDK 路径
set(OpenCV_ROOT_PATH "${PROJECT_ROOT_PATH}/third_party/opencv-mobile-4.10.0-lockzhiner-vision-module")
set(OpenCV_DIR "${OpenCV_ROOT_PATH}/lib/cmake/opencv4")
find_package(OpenCV REQUIRED)
set(OPENCV_LIBRARIES "${OpenCV_LIBS}")
# 定义 LockzhinerVisionModule SDK 路径
set(LockzhinerVisionModule_ROOT_PATH "${PROJECT_ROOT_PATH}/third_party/lockzhiner_vision_module_sdk")
set(LockzhinerVisionModule_DIR "${LockzhinerVisionModule_ROOT_PATH}/lib/cmake/lockzhiner_vision_module")
find_package(LockzhinerVisionModule REQUIRED)
# 图像信息处理
add_executable(Test-Image-information-statistics Image_information_statistics.cc)
target_include_directories(Test-Image-information-statistics PRIVATE ${LOCKZHINER_VISION_MODULE_INCLUDE_DIRS})
target_link_libraries(Test-Image-information-statistics PRIVATE ${OPENCV_LIBRARIES}${LOCKZHINER_VISION_MODULE_LIBRARIES})
install(
TARGETS Test-Image-information-statistics
RUNTIME DESTINATION .
)
4.3 编译项目
使用 Docker Destop 打开 LockzhinerVisionModule 容器并执行以下命令来编译项目
# 进入Demo所在目录
cd /LockzhinerVisionModuleWorkSpace/LockzhinerVisionModule/Cpp_example/B02_Image_information_statistics
# 创建编译目录
rm-rf build && mkdir build && cd build
# 配置交叉编译工具链
exportTOOLCHAIN_ROOT_PATH="/LockzhinerVisionModuleWorkSpace/arm-rockchip830-linux-uclibcgnueabihf"
# 使用cmake配置项目
cmake ..
# 执行编译项目
make-j8 && make install
在执行完上述命令后,会在build目录下生成可执行文件。
5. 例程运行示例
5.1 运行过程
在凌智视觉模块中输入以下命令:
chmod777 Test-Image-information-statistics
./Test-Image-information-statistics
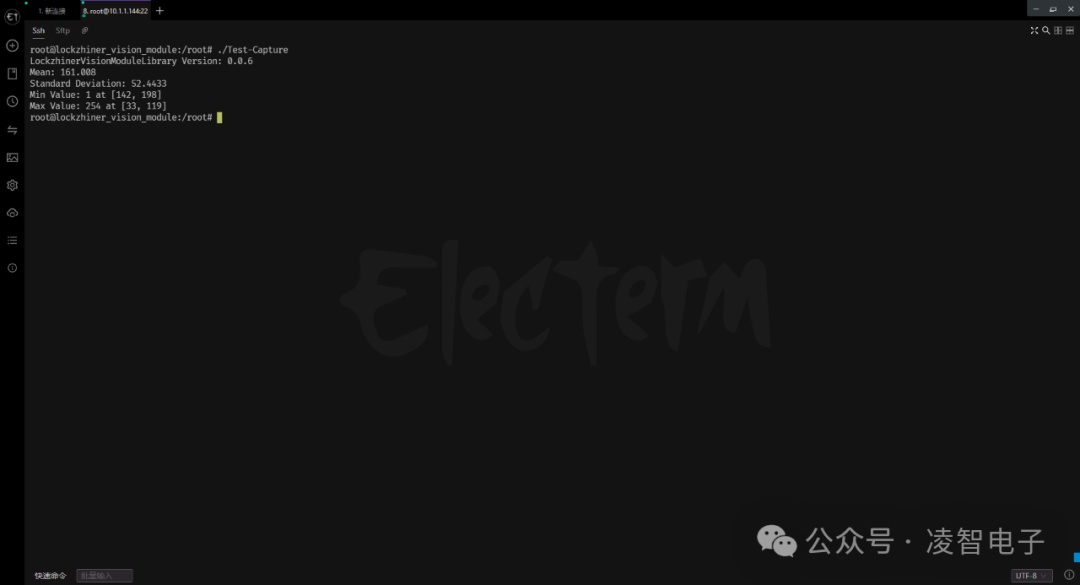
5.2 运行效果
在运行上述代码时,会输出以下结果:
6. 总结
通过上述内容,我们介绍了如何使用 OpenCV 提取图像的 ROI、转换颜色空间、计算统计信息等操作。按照以下步骤,您可以轻松地进行图像的统计分析:
提取 ROI:使用 cv::Rect 提取感兴趣区域。
颜色转换:使用 cv::cvtColor 转换颜色空间。
计算统计信息:
使用 cv::meanStdDev 计算均值和标准差。
使用 cv::minMaxLoc 查找最小值和最大值及其位置。
综合应用:结合上述方法对图像进行局部分析和全局统计。
-
基于LockAI视觉识别模块:C++人脸识别2025-07-01 1234
-
基于LockAI视觉识别模块:手写数字识别2025-06-30 1383
-
基于LockAI视觉识别模块:C++目标检测2025-06-06 1116
-
基于LockAI视觉识别模块:C++条码识别2025-05-27 1103
-
基于LockAI视觉识别模块:C++二维码识别2025-05-26 1265
-
# 基于LockAI视觉识别模块:C++寻找色块2025-05-12 1051
-
基于LockAI视觉识别模块:C++使用图像的统计信息2025-05-08 662
-
基于LockAI视觉识别模块:C++图像的基本运算2025-05-06 934
-
基于LockAI视觉识别模块:C++图像采集例程2025-04-30 789
全部0条评论

快来发表一下你的评论吧 !
