

船载卫星通信跟踪系统研究及设计
通信网络
描述
在占地球总面积70%左右的海洋上无法建立基站,由此迫切需要稳健的船载卫星通信系统。船载卫星通信系统研究主要包括系统配置设计、控制策略、硬件选型和监控系统的设计。为了克服船体的运动,三轴随动控制系统采用模糊PID算法,根据一系列的对星策略以使船体在运动中始终对准卫星,实现实时通信。采用FPGA芯片作为陀螺仪温度补偿数据处理系统,可使整个随动系统更为精准快速。监控系统舍弃较为传统的客户端/服务器架构,选择浏览器/服务器架构。通过模拟测试,验证了船载卫星通信系统具有较好的性能和友好的应用性。
由于海上缺少固定的通信中继站,而船载卫星通信系统正好可以充当海上的通信中继站,我国要建设成为海洋强国,海洋通信必不可少,由此迫切需要高性能的船载卫星通信产品。于是开发高性能的船载卫星通信跟踪系统具有重要的现实意义。
正是基于该目的,船载卫星通信系统采用了GPS获取三轴的绝对地理坐标,配以电子罗盘测量三轴理论角度,加上基于现场可编程逻辑门阵列(Field Programmable Gate Array,FPGA)的温度补偿过的三轴陀螺仪测量三轴的瞬时速度来达到快速补偿的目的,根据搜索算法和跟踪算法使整个随动系统在模糊PID控制算法下更为精准快速地实现对星。为了监控船载卫星通信系统的性能以及实现对船载卫星通信系统的人为操作,通过有线局域网或无线WiFi实现船载卫星通信系统与监控系统的相互连接,监控系统采用嵌入式Web服务器的浏览器/服务器(Browser/Server,B/S)架构。
1系统总体结构设计
1.1船载卫星通信工作过程
船载卫星通信系统的工作过程可以分成两个部分,即发射过程和接收过程。发射过程将要传输的信息依次经过交换机和卫星调制解调器,由上变频功率放大器(Block UpConverter,BUC)将信号调制成适合在无线环境中传输的信号,再由船载天线发射出去。船载接收过程则与发射过程相反,天线接收到的信号经过低噪声下变频器(Low Noise Block downconverter,LNB)滤波放大后送入定向耦合器,定向耦合器将接收到的信号分成两路或多路,其中一路由卫星调制解调器完成解调用于业务;一路将作为信标机的信号源,用于测量目标卫星的信号强度,当然船载卫星通信系统与卫星之间的通信方式是全双工的。
1.2船载卫星通信系统结构
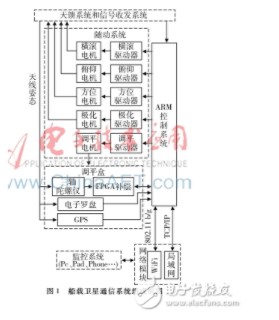
船载卫星通信系统研究的主要对象由ARM控制系统、控制天线姿态的随动系统、调平盒模块、监控系统、网络模块组成,其中调平盒模块中含有为解决三轴陀螺仪零点漂移难题的基于FPGA的温度补偿子模块。
船载卫星通信系统是以轮船为载体,载体在海水运动的干扰下不仅会有三维运动,而且运动轨迹没有规律无法制定相应的规则。为了高效率、高精度地实现船载天线时刻保持对星的姿态,必须采取一系列的控制策略才能顺畅地完成正常的通信。在茫茫大海上要想得到船载天线的状态,可通过安装在船载跟踪系统上的全球定位系统(Global Positioning System,GPS)实时地获取跟踪系统的经、纬度信息,通过和目标卫星的经纬度计算得到船载卫星通信系统的天线对准卫星所需的理论位置和俯仰角,电子罗盘采集船载天线的航向角度、俯仰角度和横摇角度,三轴陀螺仪测量三轴的瞬时速度来达到快速补偿的目的[3]。ARM控制系统会根据所得到的天线状态以及信标接收机反馈回来的信号强度实时地控制随动系统使船载天线对准目标卫星。船载卫星通信系统组成框图如图1所示。
2硬件模块设计
2.1陀螺仪温度补偿模块设计
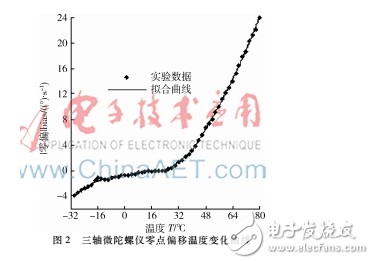
为了提高本系统的性价比,本设计没有选择昂贵的惯性导航系统而选择使用型号为CRS0302的微机械陀螺仪,但微机械陀螺仪有严重的零点漂移问题,这是以前船载卫星通信系统中所不能解决的难点,本系统采用温度补偿策略克服三轴陀螺仪的温漂问题。对于温度补偿的模型如果从材料原理方面用理论推导过于复杂,不如采用实验的方法快速有效。实验过程如下:将三轴陀螺仪放在可调的恒温箱中,在-30℃~+80℃的温度范围内,每隔2℃测量一次零点偏移量;每次采样15 min取平均值作为该温度下三轴陀螺仪的零点偏量。图2中用实心圆点表示测量的数据,实线是通过三次方基本拟合得到零点偏移量的拟合曲线方程,即:
当-30℃≤T≤-16℃时,
bias=-0.526 55+0.003 62t-0.004 51t2-0.000 03t3;
当-16℃≤T≤+24℃时,
bias=-0.723 14+0.047 63t-0.000 63t2;
当24℃≤T≤40℃时,
bias=-2.747 3+0.129 48t-0.002 04t2+0.000 06t3;
当40℃≤T≤80℃时,
bias=-12.843 7+0.429 476t-0.002 035t2+0.000 03t3
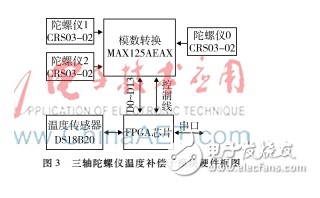
陀螺仪温度补偿模块采用芯片MAX125AEAX完成模数转换,该模数转换有8个输入通道分成两组,每组的4个通道可以同时完成转换任务。三轴陀螺仪可以用其中一组,另外一组留给其他输出模拟信号的传感器使用。温度传感器选用输出数字量的DS18B20完成三轴微机械陀螺仪所处环境的温度测量。FPGA芯片是这个子模块的核心,它控制着模数转换、温度传感器协同工作。根据实验得到的4段陀螺仪温度补偿拟合曲线,在FPGA芯片内部写成相应的补偿程序就可以计算出不同温度下三轴微机械陀螺仪的温度偏移补偿值;将陀螺仪数字量减去相应的补偿值得到补偿后的陀螺仪信号数字量,即可通过FPGA串口传送给ARM控制系统,使得随动系统能够控制天线实时跟踪到卫星。三轴陀螺仪温度补偿子模块硬件框图如图3所示。
2.2网络模块
采用客户端/服务器(Client/Server,C/S)模式的监控系统存在只能在本地监控、需要安装某些特定的应用程序等弊端;而基于嵌入式Web的B/S架构监控方案是通过无线(WiFi)或有线(TCP/IP)实现嵌入式系统与其他设备(PC、Pad、Phone等)的连接。B/S架构可以有效地解决客户端/服务器架构的不足。
为了实现B/S模式,网络模块采用无线网和有线网两种方式,能够很好地互补彼此的不足。有线电路由RJ45接口连接其他设备进行数据传输,通过DM9161BIEP芯片处理后传送给ARM控制系统;考虑到监控系统要在手持终端上使用,于是需要配置WiFi无线模块,为了提高本设计的进程,无线通信方式的硬件选用支持802.11a/b/g标准的威盛可插拔USB接口的无线模块,直接通过USB接口实现与ARM控制系统的连接。硬件的应用还需要在嵌入式中移植无线网设备驱动和网络互联的基本配置。基于这些设计之后,系统监控只需要在客户端设备安装浏览器软件即可。
2.3随动系统
2.3.1随动系统的模糊PID算法
根据反馈给ARM控制系统的天线情况,控制系统将控制5个步进电机的驱动器实现对步进电机的控制,为了提高随动系统的控制速度和精度,本系统采用模糊PID算法。
传统PID的3个参数Ki、Kp、Kd通过误差整定,结构和算法相对简单,而载体在海洋中的工作用传统的PID很难满足。模糊PID能够根据偏差和偏差变化率自动调节PID的3个参数。参数整定有如下经验:当偏差较大时,为使系统具有较好的跟踪性能,取较大的Kp,Ki=0;当偏差和偏差变化率处于中等大小时,为了使系统响应具有较小的超调,Kp应取值小一些,Kd的取值对系统响应的影响较大,Ki的取值要适当;当偏差较小时,为使系统具有较好的稳定性能,Kp与Ki均应取得大些,为避免系统在设定值附近出现震荡,Kd的取值相当重要,一般在偏差变化率较小时,Kd取值应该较大,反之则反。在系统运行时实时检测偏差和偏差变化率的值,根据模糊规则在线修改PID的3个参数,使得PID参数可自整定,以满足不同偏差和偏差变化率对控制参数的要求。
2.3.2船载天线的搜索算法和跟踪算法
利用电子罗盘和双GPS测姿仪能直接定位载体的方位角,所以船载天线可以直接或间接地走到理论方位。搜索模式采用画框模式,就是以理论位置为中心向外画框,随着搜索的进行画的框越来越大。画框的同时监控自动增益控制(Analog Gain Control,AGC)的变化,如果超过门限,立即停止画框进入跟踪模式。若画框搜索完设定的圈数后还没有找到卫星,则重新走到理论位置,再次进行画框搜索。应用人员也可以根据实际情况在监控系统中调节方位、俯仰的步进角度和画框圈数。画框搜索算法的船载天线波束的运动轨迹如图4所示。

画框搜索监控到目标卫星的AGC超过门限值后立即进入圆锥跟踪状态。圆锥跟踪状态是船载天线进行通信时所保持的状态,在该状态下,程序会控制天线做轨迹为圆的圆周运动,根据AGC的差值计算天线需要调整的角度,通过对方向图的拟合,发现超过门限值的方向图成二次曲线。将固定相差角度的两点AGC与这两点的中心距离方向图中AGC最大点两者的分布进行拟合,发现线性度很高,R2=0.949 3。所以用左右两点多的AGC的差值乘以一个系数就可以作为调整的角度。最终使得船载天线始终指向目标卫星。圆锥搜索算法的船载天线波束的运动轨迹如图5所示。

3监控系统设计
前文已经说明支撑监控系统所需要的硬件配置,这里对监控系统本身进行说明。可以在选型为AT91SAM9263的ARM芯片中移植嵌入式Linux操作系统,主要考虑到它具有可裁剪、多用户、多任务、设备文件化以及适合小型嵌入式系统等优点。利用嵌入式Linux操作系统的网络功能,还要在ARM芯片中移植Web服务器Boa,Boa是一个非常小巧的网页服务器。由于嵌入式系统本身对数据的存储和程序运行空间有较大的限制等特点,所以采用嵌入式SQLite数据库。客户端浏览器与网络服务器之间的信息传递规范采用通用网关接口(Common Gateway Interface,CGI),它的主要功能是从浏览器的表单中解析出有用成分,再将解析的结果与服务器数据结合在一起,以布局整洁的网页呈现给用户。
客户端用户在浏览器的地址栏中输入Web服务器的IP地址,浏览器与服务器之间就会通过HTTP协议建立连接。连接建立之后,浏览器就能发送表单请求,每当服务器端接收到请求之后,服务器Boa就会创建新的CGI进程来处理请求。一方面,CGI程序能够获得来自服务器的数据,另一方面,CGI程序所产生的数据又能够经由标准输入、标准输出返回给服务器。服务器端的CGI程序还能够通过消息缓存队列与控制系统进行交互,将用户要求发送给控制程序,控制程序根据用户需求驱动电机完成对星动作。
监控系统通过Ajax技术和CGI为用户提供良好的用户体验。为了使监控系统适应不同的客户端设备,在网页设计中,必须采用不同网页分辨率的自适应技术。
4结束语
本文主要对船载卫星通信系统的硬件、随动系统的控制策略以及目标卫星的搜索跟踪算法进行研究与设计。在摇摆台上进行了重复试验,船载天线能在2 min左右跟踪到目标卫星,检测到的目标卫星AGC信号波动范围小于0.5 dB。由于陀螺仪零点漂移引起的丢星现象也得到了有效的改善;并且通过浏览器监控系统,使其拥有更好的用户体验。
-
卫星通信效能评估系统平台2025-08-13 982
-
科普|卫星通信地球站有哪些种类?2025-06-18 2311
-
机载卫星通信系统的工作原理和关键技术研究2021-06-29 13747
-
卫星通信技术有哪些应用?2019-08-29 8883
-
卫星通信系统将迎来什么新压力呢?2019-08-01 2828
-
卫星通信Ka频段的带宽2019-07-23 3623
-
机载卫星通信的详细介绍2019-07-11 4872
-
卫星通信的SATCOM系统设计解决方案2019-04-15 7113
-
卫星通信天线伺服系统的离散滑模控制算法研究2010-04-22 2149
-
卫星通信系统原理什么?2010-04-03 13110
-
VSAT卫星通信系统,VSAT卫星通信系统是什么意思2010-03-13 7206
-
宽带卫星通信系统编址方案研究2009-08-29 718
-
LEO与GEO混合轨道卫星通信系统2009-03-02 2974
-
混合轨道卫星通信系统的路由算法研究2009-02-28 962
全部0条评论

快来发表一下你的评论吧 !
