

# 基于LockAI视觉识别模块:C++寻找色块
描述
在传统计算机视觉场景中,颜色识别是目标检测和分割的重要手段之一。通过识别特定颜色的色块,可以在相对纯净的背景下快速定位目标区域。本实验提供了一个简单的色块识别案例,并将其封装为一个自定义函数 find_blobs,方便快速移植和使用。
源代码地址:https://gitee.com/LockzhinerAI/LockzhinerVisionModule/tree/master/Cpp_example/C01_find_blobs
1. 基本知识讲解
1.1 色块识别的重要性
颜色特征提取:颜色是一种重要的视觉特征,尤其在背景较为单一的情况下,能够快速区分目标区域。
应用场景:广泛应用于机器人导航、工业自动化、物体跟踪等领域。
HSV 颜色空间:相比于 RGB 颜色空间,HSV 更适合用于颜色识别,因为它可以将颜色信息(Hue)、饱和度(Saturation)和亮度(Value)分离,便于设置阈值。
1.2 色块识别的流程
获取图像。
将图像从 BGR 转换为 HSV 颜色空间。
创建二值掩码,筛选出符合颜色范围的像素。
使用形态学操作清除噪声。
查找轮廓并筛选符合条件的色块。
计算外接矩形和中心点。
绘制结果并输出。
2. API文档
2.1 头文件
#include
2.2 生成掩码
cv::inRange(src, lowerb, upperb, dst);
参数说明:
src:输入图像,可以是单通道或三通道的图像。
lowerb:颜色下界,是一个Scalar对象,表示要查找的颜色的下限。
upperb:颜色上界,是一个Scalar对象,表示要查找的颜色的上限。
dst:输出图像,是一个单通道的8位无符号整数图像,表示生成的掩码。
返回值:
无
2.3 创建形态学操作所需的结构元素核
cv::getStructuringElement(shape, ksize, anchor);
参数说明:
shape:核形状,可以是RECT、CROSS、ELLIPSE等。
ksize:核大小,是一个Size对象,表示核的宽度和高度。
anchor:锚点,是一个Point对象,表示核的锚点位置。
返回值:
返回一个核,是一个Mat对象。
2.4 形态学操作:清除噪声
cv::morphologyEx(src, dst, op, kernel, anchor, iterations, borderType, borderValue);
参数说明:
src:输入图像,可以是单通道或三通道的图像。
dst:输出图像,是一个单通道的8位无符号整数图像,表示生成的掩码。
op:操作类型,可以是OPEN、CLOSE、GRADIENT、TOPHAT、BLACKHAT等。
kernel:核,是一个Mat对象,表示形态学操作的核。
anchor:锚点,是一个Point对象,表示核的锚点位置。
iterations:迭代次数,是一个整数,表示形态学操作的迭代次数。
borderType:边界类型,可以是BORDER_CONSTANT、BORDER_REPLICATE、BORDER_REFLECT、BORDER_WRAP、BORDER_REFLECT_101等。
borderValue:边界值,是一个Scalar对象,表示边界区域的值。
返回值:
无
2.5 查找轮廓
cv::findContours(image, contours, hierarchy, mode, method, offset);
参数说明:
image:输入图像,可以是单通道或三通道的图像。
contours:输出参数,是一个vector>对象,表示轮廓的集合。
hierarchy:输出参数,是一个vector对象,表示轮廓的层级关系。
mode:轮廓发现模式,可以是RETR_EXTERNAL、RETR_LIST、RETR_CCOMP、RETR_TREE等。
method:轮廓 approximation 方法,可以是CHAIN_APPROX_NONE、CHAIN_APPROX_SIMPLE、CHAIN_APPROX_TC89_L1、CHAIN_APPROX_TC89_KCOS等。
offset:轮廓偏移量,是一个Point对象,表示轮廓的偏移量。
返回值:
返回一个整数,表示轮廓的数量。
2.6 获取轮廓的外接矩形
cv::boundingRect(points);
参数说明:
points:输入参数,是一个vector对象,表示轮廓的点集合。
返回值:
返回一个Rect对象,表示轮廓的外接矩形。
2.7 计算矩阵矩
cv::moments(array, binaryImage);
参数说明:
array:输入参数,是一个Mat对象,表示输入的矩阵。
binaryImage:输入参数,是一个布尔值,表示是否将输入的矩阵转换为二值矩阵。
返回值:
返回一个 Moments对象,表示矩阵的矩。
2.8 绘制矩形框
cv::rectangle(img, pt1, pt2, color, thickness, lineType, shift);
参数说明:
img:输入参数,是一个Mat对象,表示输入的图像。
pt1:输入参数,是一个Point对象,表示矩形的左上角点。
pt2:输入参数,是一个Point对象,表示矩形的右下角点。
color:输入参数,是一个Scalar对象,表示矩形的颜色。
thickness:输入参数,是一个整数,表示矩形的线宽。
lineType:输入参数,是一个整数,表示矩形的线类型。
shift:输入参数,是一个整数,表示坐标的精度。
返回值:
无
2.9 绘制圆
cv::circle(img, center, radius, color, thickness, lineType, shift);
参数说明:
img:输入参数,是一个Mat对象,表示输入的图像。
center:输入参数,是一个Point对象,表示圆心。
radius:输入参数,是一个整数,表示圆的半径。
color:输入参数,是一个Scalar对象,表示圆的颜色。
thickness:输入参数,是一个整数,表示圆的线宽。
lineType:输入参数,是一个整数,表示圆的线类型。
shift:输入参数,是一个整数,表示坐标的精度。
返回值:
无
3. 综合代码介绍
3.1 流程图

3.2 核心代码解析
BGR转HSV
cv::cvtColor(image, hsv_image, cv::COLOR_BGR2HSV);
阈值分割
cv::inRange(hsv_image, lower_bound, upper_bound, mask););
形态学处理
cv::Matkernel=cv::getStructuringElement(cv::MORPH_RECT, cv::Size(kernel_size, kernel_size));
cv::morphologyEx(mask, mask, cv::MORPH_OPEN, kernel);
查找轮廓
cv::findContours(mask, contours, cv::RETR_EXTERNAL, cv::CHAIN_APPROX_SIMPLE);
自定义函数参数如下所示
std::vector<std::vector<cv::Point>>find_blobs(
constcv::Mat&image,
constcv::Scalar&lower_bound,
constcv::Scalar&upper_bound,
intmin_area=100,
intkernel_size=5);
参数说明:
image:输入参数,是一个Mat对象,表示输入的图像。
lower_bound:输入参数,是一个Scalar对象,表示颜色下界。
upper_bound:输入参数,是一个Scalar对象,表示颜色上界。
min_area:输入参数,是一个整数,表示最小面积。
kernel_size:输入参数,是一个整数,表示核大小。
返回值:
返回一个vector>对象,表示找到的色块的点集合。
3.3 完整代码实现
#include
#include
#include
#include
std::vector<std::vector<cv::Point>>find_blobs(
constcv::Mat&image,
constcv::Scalar&lower_bound,
constcv::Scalar&upper_bound,
intmin_area=100,
intkernel_size=5)
{
// 转换为 HSV 颜色空间
cv::Mathsv_image;
cv::cvtColor(image, hsv_image, cv::COLOR_BGR2HSV);
// 创建二值掩码
cv::Matmask;
cv::inRange(hsv_image, lower_bound, upper_bound, mask);
// 形态学操作:清除噪声
cv::Matkernel=cv::getStructuringElement(cv::MORPH_RECT, cv::Size(kernel_size, kernel_size));
cv::morphologyEx(mask, mask, cv::MORPH_OPEN, kernel);
// 查找轮廓
std::vector<std::vector<cv::Point>>contours;
cv::findContours(mask, contours, cv::RETR_EXTERNAL, cv::CHAIN_APPROX_SIMPLE);
// 筛选符合条件的色块
std::vector<std::vector<cv::Point>>filtered_contours;
for (constauto&contour : contours)
{
cv::Rectbounding_rect=cv::boundingRect(contour);
if (bounding_rect.area() >=min_area)
{
filtered_contours.push_back(contour);
}
}
returnfiltered_contours;
}
intmain()
{
lockzhiner_vision_module::Editedit;
if (!edit.StartAndAcceptConnection())
{
std::cerr<<"Error: Failed to start and accept connection."<<std::endl;
returnEXIT_FAILURE;
}
std::cout<<"Device connected successfully."<<std::endl;
cv::VideoCapturecap;
intwidth=640; // 设置摄像头分辨率宽度
intheight=480; // 设置摄像头分辨率高度
cap.set(cv::CAP_PROP_FRAME_WIDTH, width);
cap.set(cv::CAP_PROP_FRAME_HEIGHT, height);
// 打开摄像头设备
cap.open(0); // 参数 0 表示默认摄像头设备
if (!cap.isOpened())
{
std::cerr<<"Error: Could not open camera."<<std::endl;
returnEXIT_FAILURE;
}
while (true)
{
cv::Matimage; // 存储每一帧图像
cap>>image; // 获取新的一帧
// 定义颜色阈值(例如红色)
cv::Scalarlower_red(170, 100, 100); // 红色下界
cv::Scalarupper_red(179, 255, 255); // 红色上界
// 调用 find_blobs 函数
intmin_area=100; // 最小面积阈值
intkernel_size=1; // 形态学操作核大小
std::vector<std::vector<cv::Point>>blobs=find_blobs(image, lower_red, upper_red, min_area, kernel_size);
// 绘制和打印检测到的色块
for (constauto&contour : blobs)
{
// 计算外接矩形框
cv::Rectbounding_rect=cv::boundingRect(contour);
// 绘制矩形框
cv::rectangle(image, bounding_rect, cv::Scalar(0, 255, 0), 2);
// 计算中心点
cv::Momentsmoments=cv::moments(contour);
intcx=moments.m10/moments.m00;
intcy=moments.m01/moments.m00;
// 绘制中心点
cv::circle(image, cv::Point(cx, cy), 5, cv::Scalar(0, 0, 255), -1);
// 打印信息
std::cout<<"Blob detected at ("<<cx<<", "<<cy<<") with area "<<bounding_rect.area() <<std::endl;
}
edit.Print(image);
}
return0;
}
4. 编译过程
4.1 编译环境搭建
请确保你已经按照 开发环境搭建指南 正确配置了开发环境。
同时以正确连接开发板。
4.2 Cmake介绍
# CMake最低版本要求
cmake_minimum_required(VERSION 3.10)
project(test-find-blobs)
set(CMAKE_CXX_STANDARD 17)
set(CMAKE_CXX_STANDARD_REQUIRED ON)
# 定义项目根目录路径
set(PROJECT_ROOT_PATH "${CMAKE_CURRENT_SOURCE_DIR}/../..")
message("PROJECT_ROOT_PATH = "${PROJECT_ROOT_PATH})
include("${PROJECT_ROOT_PATH}/toolchains/arm-rockchip830-linux-uclibcgnueabihf.toolchain.cmake")
# 定义 OpenCV SDK 路径
set(OpenCV_ROOT_PATH "${PROJECT_ROOT_PATH}/third_party/opencv-mobile-4.10.0-lockzhiner-vision-module")
set(OpenCV_DIR "${OpenCV_ROOT_PATH}/lib/cmake/opencv4")
find_package(OpenCV REQUIRED)
set(OPENCV_LIBRARIES "${OpenCV_LIBS}")
# 定义 LockzhinerVisionModule SDK 路径
set(LockzhinerVisionModule_ROOT_PATH "${PROJECT_ROOT_PATH}/third_party/lockzhiner_vision_module_sdk")
set(LockzhinerVisionModule_DIR "${LockzhinerVisionModule_ROOT_PATH}/lib/cmake/lockzhiner_vision_module")
find_package(LockzhinerVisionModule REQUIRED)
# 基本图像处理示例
add_executable(Test-find-blobs find_blobs.cc)
target_include_directories(Test-find-blobs PRIVATE ${LOCKZHINER_VISION_MODULE_INCLUDE_DIRS})
target_link_libraries(Test-find-blobs PRIVATE ${OPENCV_LIBRARIES}${LOCKZHINER_VISION_MODULE_LIBRARIES})
install(
TARGETS Test-find-blobs
RUNTIME DESTINATION .
)
4.3 编译项目
使用 Docker Destop 打开 LockzhinerVisionModule 容器并执行以下命令来编译项目
# 进入Demo所在目录
cd /LockzhinerVisionModuleWorkSpace/LockzhinerVisionModule/Cpp_example/C01_find_blobs
# 创建编译目录
rm-rf build && mkdir build && cd build
# 配置交叉编译工具链
exportTOOLCHAIN_ROOT_PATH="/LockzhinerVisionModuleWorkSpace/arm-rockchip830-linux-uclibcgnueabihf"
# 使用cmake配置项目
cmake ..
# 执行编译项目
make-j8 && make install
在执行完上述命令后,会在build目录下生成可执行文件。
5. 例程运行示例
5.1 运行过程
chmod777 Test-find-blobs
./Test-find-blobs
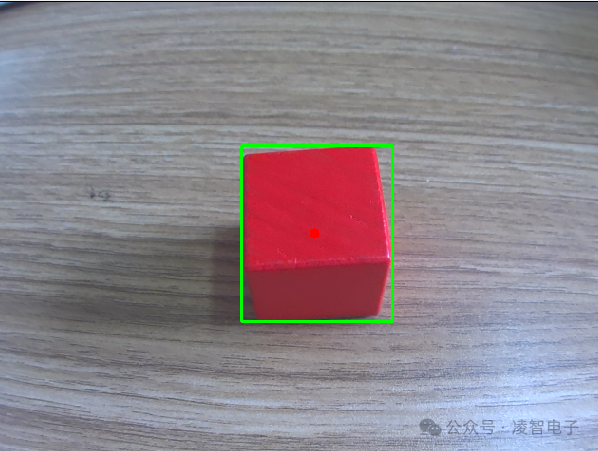
5.2 运行效果
6. 总结
通过上述内容,我们详细介绍了色块识别的流程及相关 API 的使用方法,包括:
生成掩码:筛选符合颜色范围的像素。
形态学操作:清除噪声。
查找轮廓:获取目标区域的轮廓。
筛选与绘制:筛选符合条件的色块并绘制外接矩形和中心点。
-
基于LockAI视觉识别模块:C++人脸识别2025-07-01 1239
-
基于LockAI视觉识别模块:手写数字识别2025-06-30 1385
-
基于LockAI视觉识别模块:C++目标检测2025-06-06 1118
-
基于LockAI视觉识别模块:C++条码识别2025-05-27 1105
-
基于LockAI视觉识别模块:C++二维码识别2025-05-26 1269
-
基于LockAI视觉识别模块:C++同时识别轮廓和色块2025-05-23 1208
-
基于LockAI视觉识别模块:C++寻找色块2025-05-12 525
-
基于LockAI视觉识别模块:C++使用图像的统计信息2025-05-08 1015
-
基于LockAI视觉识别模块:C++图像的基本运算2025-05-06 935
-
基于LockAI视觉识别模块:C++图像采集例程2025-04-30 789
全部0条评论

快来发表一下你的评论吧 !
