

先楫半导体HPM6E8Y:先楫实时控制芯片驱动的机器人关节“芯”时代
机器人
描述
机器人的运动控制需要兼顾通信的高实时性及高带宽,以确保机器人能够迅速响应外部指令和环境变化。如何去解决机器人运动下的通信难题,在松山湖中国IC创新高峰论坛上,上海先楫半导体科技有限公司嵌入式专家及产品总监费振东带来了一款实时控制芯片驱动——HPM6E8Y。

据费振东介绍,先楫半导体HPM6E8Y系列高性能MCU芯片为机器人关节的高精度运动控制量身打造,具有高性能、高集成度、小封装及简单易用等特点。HPM6E8Y系列通过内置的SoC高速总线扩展EtherCAT从站控制器,提供卓越的通信数据带宽,完美满足了从运动控制器到执行器之间的全链路高速通信需求,确保数据传输的高效与流畅。

HPM6E8Y系列MCU内置RISC-V双核,集成2个以太网PHY收发器,不仅支持EtherCAT从控制器(ESC: EtherCAT Slave Controller),还支持多达3个外部端口的时间敏感网络(TSN: Time Sensitive Networking)千兆以太网交换机,同时拥有32通道高分辨率PWM输出及∑∆数字滤波器,为高精度运动控制系统量身打造出色的硬件平台。工作温度范围-40℃~105℃,已经在2025年1月份全面上市。
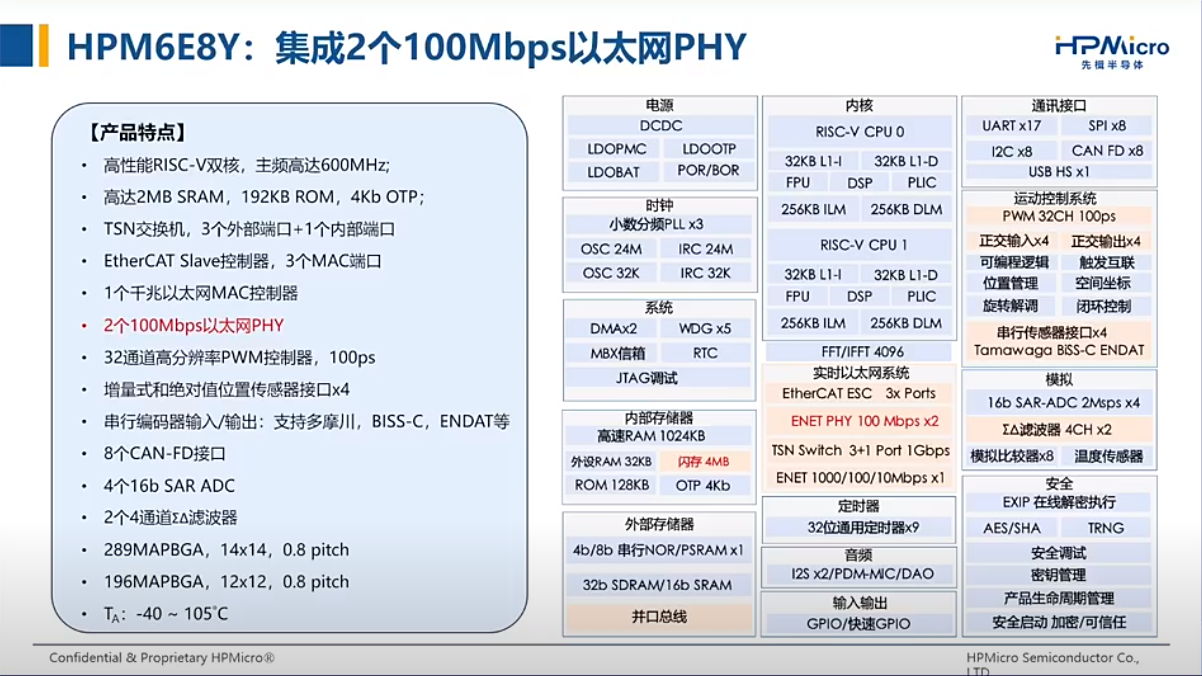
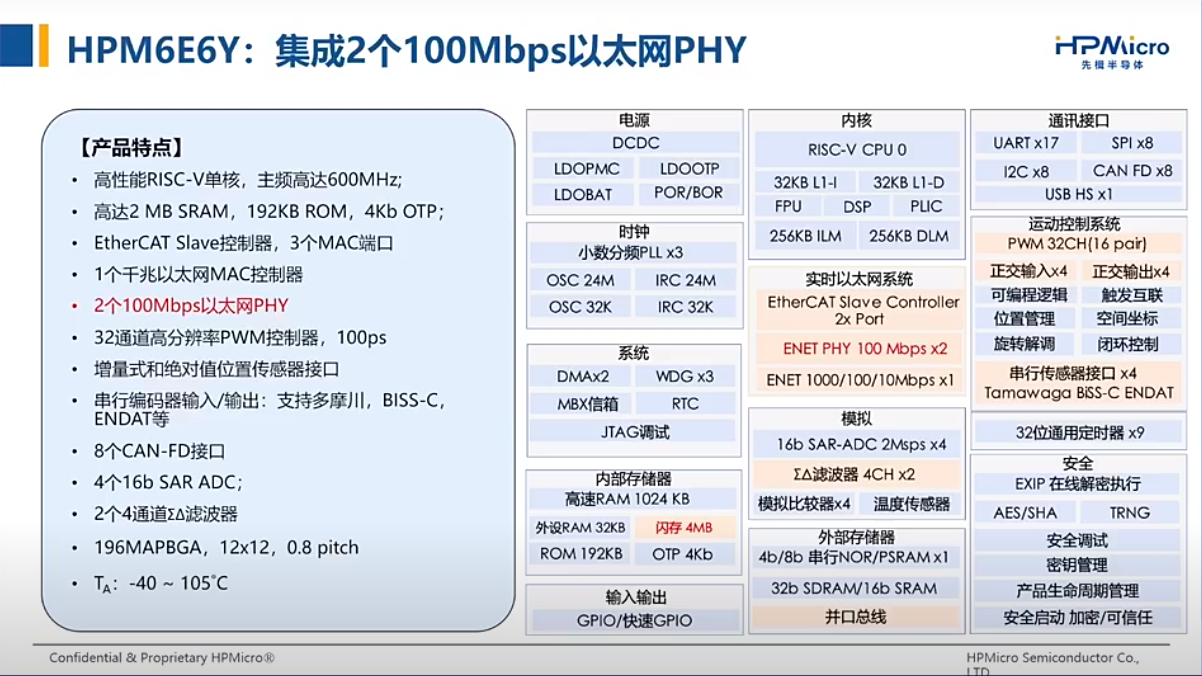
HPM6E8Y系列能够确保以太网通信的高度实时响应与极低延迟,完美适用于小空间、大算力、强通信的高性能伺服电机控制、机器人运动控制等工业自动化场景,使其成为机器人关节、紧凑型伺服驱动器等应用的理想之选,进一步提升了系统的集成度与性能优势。

机器人的运动控制需要兼顾通信的高实时性和高带宽,以确保机器人能够迅速响应外部指令和环境变化。先楫通过将EtherCAT与TSN集成到RISC-V控制芯片中,提供卓越的通信数据带宽,很好地满足了从运动控制器到执行器之间的全链路高速通信需求,为高精度运动控制系统量身打造了出色的硬件平台,成为目前机器人系统的刚需。
-
三城联动圆满收官!先楫“芯”驱动机器人运动控制全链路落地2026-04-24 1409
-
CES2026:先楫半导体隆重推出HPM5E3Y,打造机器人运动控制芯片阵容2026-01-08 1832
-
先楫半导体荣膺“年度优秀AI机器人创新产品奖” | “芯”动力赋能产业升级2025-11-06 1833
-
HPM6E8Y斩获“年度优秀AI芯片奖”,国产高性能MCU重塑机器人关节控制新范式2025-08-26 3626
-
先楫半导体HPM6E8Y荣获芯片创新奖,彰显卓越产品力!2025-03-04 1679
-
先楫半导体发布高性能HPM6E8Y系列MCU2025-01-23 1822
-
CES 2025:先楫半导体发布高性能机器人MCU2025-01-09 1684
-
先楫HPM6E00技术日 | 百人研讨共话工业应用创新及发展趋势2024-09-02 2094
-
有奖提问!先楫半导体HPM6E00系列新品发布会!!2024-06-20 7298
-
先楫半导体产品体验官代码仓库集锦2023-05-25 5539
-
实现创新升级替代,先楫半导体助力中国MCU “快道超车”2023-04-10 2258
-
先楫半导体HPM6700系列正式合入OpenHarmony社区主干2022-11-11 1254
-
先楫半导体重磅推出HPM6300系列—— 高性能,低功耗,高性价比2022-05-07 6284
全部0条评论

快来发表一下你的评论吧 !
