

 RV1106平台基于PaddleDetection的高效目标检测全指南(FPS 25 帧)
RV1106平台基于PaddleDetection的高效目标检测全指南(FPS 25 帧)
电子说
1.4w人已加入
描述
@TOC
目标检测
本文档展示了如何使用 lockzhiner_vision_module::vision::PaddleDet 类进行目标检测,并通过
lockzhiner_vision_module::vision::Visualize 函数将检测结果可视化。
1. 基础知识讲解
1.1 目标检测的基本介绍
目标检测是计算机视觉领域中的一个关键任务,它不仅需要识别图像中存在哪些对象,还需要定位这些对象的位置。具体来说,目标检测算法会输出每个检测到的对象的边界框(Bounding Box)以及其所属类别的概率或置信度得分。
- 应用场景:目标检测技术广泛应用于多个领域,包括但不限于安全监控、自动驾驶汽车、智能零售和医疗影像分析。
1.2 PaddleDetection 的基本介绍
PaddleDetection 是基于百度飞桨深度学习框架开发的一个高效的目标检测库,支持多种先进的目标检测模型,如 YOLO 系列、SSD、Faster R-CNN、Mask R-CNN 等。它提供了简单易用的接口,使得开发者能够快速部署高性能的目标检测应用。
- 特点:
- 高性能:优化了推理速度,在保持高精度的同时实现了快速响应。
- 灵活性:支持多种预训练模型,可以根据具体需求选择合适的模型架构。
- 易于集成:提供 C++ API,便于嵌入式系统或桌面应用程序中使用。
- 丰富的模型库:涵盖单阶段(One-stage)和双阶段(Two-stage)检测模型,满足不同场景的需求。
- 适用场景:适用于需要对视频流或图像进行实时分析的应用场景,例如安防监控、智能交通系统、工业自动化等。
2. API 文档
2.1 PaddleDetection 类
2.1.1 头文件
#include < lockzhiner_vision_module/vision/deep_learning/detection/paddle_det.h >
2.1.2 构造函数
lockzhiner_vision_module::vision::PaddleDetection();
- 作用:
- 创建一个 PaddleDetection 对象,并初始化相关成员变量。
- 参数:
- 无
- 返回值:
- 无
2.1.3 Initialize函数
bool Initialize(const std::string& model_path);
- 作用:
- 加载预训练的 PaddleDetection 模型。
- 参数:
- model_path:模型路径,包含模型文件和参数文件。
- 返回值:
- true:模型加载成功。
- false:模型加载失败。
2.1.4 SetThreshold函数
void SetThreshold(float score_threshold = 0.5, float nms_threshold = 0.3);
- 作用:
- 设置目标检测的置信度阈值和NMS阈值。
- 参数:
- score_threshold:置信度阈值,默认值为0.5。
- nms_threshold:NMS阈值,默认值为0.3。
- 返回值:
- 无
2.1.5 Predict函数
std::vector< lockzhiner_vision_module::vision::DetectionResult > Predict(const cv::Mat& image);
- 作用:
- 使用加载的模型对输入图像进行目标检测,返回检测结果。
- 参数:
- input_mat (const cv::Mat&): 输入的图像数据,通常是一个 cv::Mat 变量。
- 返回值:
- 返回一个包含多个 DetectionResult 对象的向量,每个对象表示一个检测结果。
2.2 DetectionResult 类
2.2.1 头文件
#include < lockzhiner_vision_module/vision/utils/visualize.h >
2.2.2 box函数
lockzhiner_vision_module::vision::Rect box() const;
- 作用:
- 获取目标检测结果的边界框。
- 参数:
- 无
- 返回值:
- 返回一个 lockzhiner_vision_module::vision::Rect 对象,表示目标检测结果的边界框。
2.2.3 score函数
float score() const;
- 作用:
- 获取目标检测结果的置信度得分。
- 参数:
- 无
- 返回值:
- 返回一个 float 类型的置信度得分。
2.2.4 label_id函数
- 作用:
- 获取目标检测结果的标签ID。
- 参数:
- 无
- 返回值:
- 返回一个整数,表示目标检测结果的标签ID。
2.3 Visualize 函数
2.3.1 头文件
#include < lockzhiner_vision_module/vision/utils/visualize.h >
2.3.2 函数定义
void lockzhiner_vision_module::vision::Visualize(
const cv::Mat& input_mat,
cv::Mat& output_image,
const std::vector< lockzhiner_vision_module::vision::DetectionResult >& results,
const std::vector< std::string >& labels = {},
float font_scale = 0.4
);
- 作用:
- 将目标检测结果可视化到输入图像上,并返回可视化后的图像。
- 参数:
- input_mat (const cv::Mat&): 输入图像。
- output_image (cv::Mat&): 输出图像,包含标注后的结果。
- results (const std::vectorlockzhiner_vision_module::vision::DetectionResult&): 检测结果列表。
- labels (const std::vectorstd::string&): 可选的标签列表,用于标注类别名称,默认为空。
- font_scale (float): 字体大小比例,默认为 0.4。
- 返回值:
- 无
3. 示例代码解析
3.1 流程图
开始
|
|-- 检查参数个数是否为2
| |-- 不是 - > 输出 "Usage: Test-PaddleDet model_path" 并返回1
|
|-- 初始化模型
| |-- 失败 - > 输出 "Failed to initialize model." 并返回1
|
|-- 初始化编辑模块
| |-- 失败 - > 输出 "Error: Failed to start and accept connection." 并返回EXIT_FAILURE
| |-- 成功 - > 输出 "Device connected successfully."
|
|-- 打开摄像头
| |-- 设置分辨率 (640x480)
| |-- 打开摄像头失败 - > 输出 "Error: Could not open camera." 并返回1
|
|-- 进入无限循环
| |
| |-- 捕获一帧图像
| | |-- 图像为空 - > 输出 "Warning: Captured an empty frame." 并继续下一次循环
| |
| |-- 调用模型进行预测
| | |-- 记录开始时间
| | |-- 获取预测结果
| | |-- 记录结束时间
| |
| |-- 计算推理时间
| | |-- 输出 "Inference time: X ms"
| |
| |-- 可视化结果
| | |-- 创建输出图像
| | |-- 调用可视化函数
| |
| |-- 打印输出图像
|
|-- 释放摄像头资源
|
|-- 程序正常退出 (返回0)
3.2 核心代码解析
- 初始化模型
lockzhiner_vision_module::vision::PaddleDet model;
if (!model.Initialize(argv[1])) {
std::cout < < "Failed to initialize model." < < std::endl;
return 1;
}
- 模型推理
auto results = model.Predict(input_mat);
- 可视化推理结果
cv::Mat output_image;
lockzhiner_vision_module::vision::Visualize(input_mat, output_image, results);
edit.Print(output_image);
[表情] 点击获取完整源码
4. 编译过程
4.1 编译环境搭建
- 请确保你已经按照 凌智视觉模块开发环境搭建指南 正确配置了开发环境。
- 同时以正确连接开发板。
4.2 Cmake介绍
cmake_minimum_required(VERSION 3.10)
project(D01_test_detection)
set(CMAKE_CXX_STANDARD 17)
set(CMAKE_CXX_STANDARD_REQUIRED ON)
# 定义项目根目录路径
set(PROJECT_ROOT_PATH "${CMAKE_CURRENT_SOURCE_DIR}/../..")
message("PROJECT_ROOT_PATH = " ${PROJECT_ROOT_PATH})
include("${PROJECT_ROOT_PATH}/toolchains/arm-rockchip830-linux-uclibcgnueabihf.toolchain.cmake")
# 定义 OpenCV SDK 路径
set(OpenCV_ROOT_PATH "${PROJECT_ROOT_PATH}/third_party/opencv-mobile-4.10.0-lockzhiner-vision-module")
set(OpenCV_DIR "${OpenCV_ROOT_PATH}/lib/cmake/opencv4")
find_package(OpenCV REQUIRED)
set(OPENCV_LIBRARIES "${OpenCV_LIBS}")
# 定义 LockzhinerVisionModule SDK 路径
set(LockzhinerVisionModule_ROOT_PATH "${PROJECT_ROOT_PATH}/third_party/lockzhiner_vision_module_sdk")
set(LockzhinerVisionModule_DIR "${LockzhinerVisionModule_ROOT_PATH}/lib/cmake/lockzhiner_vision_module")
find_package(LockzhinerVisionModule REQUIRED)
add_executable(Test-detection test_detection.cc)
target_include_directories(Test-detection PRIVATE ${LOCKZHINER_VISION_MODULE_INCLUDE_DIRS})
target_link_libraries(Test-detection PRIVATE ${OPENCV_LIBRARIES} ${LOCKZHINER_VISION_MODULE_LIBRARIES})
install(
TARGETS Test-detection
RUNTIME DESTINATION .
)
4.3 编译项目
使用 Docker Destop 打开 LockzhinerVisionModule 容器并执行以下命令来编译项目
# 进入Demo所在目录
cd /LockzhinerVisionModuleWorkSpace/LockzhinerVisionModule/Cpp_example/D01_test_detection
# 创建编译目录
rm -rf build && mkdir build && cd build
# 配置交叉编译工具链
export TOOLCHAIN_ROOT_PATH="/LockzhinerVisionModuleWorkSpace/arm-rockchip830-linux-uclibcgnueabihf"
# 使用cmake配置项目
cmake ..
# 执行编译项目
make -j8 && make install
在执行完上述命令后,会在build目录下生成可执行文件。
5. 例程运行示例
5.1 运行
chmod 777 Test-detection
# 在实际应用的过程中LZ-Picodet需要替换为下载的或者你的rknn模型
./Test-detection LZ-Picodet
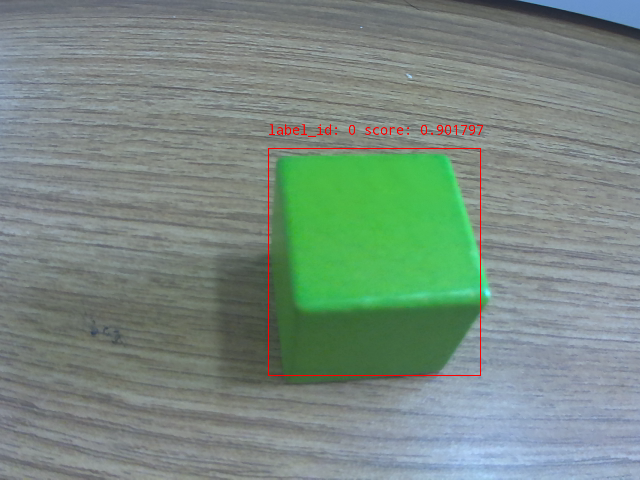
5.2 结果展示
- 可以看到我们正确识别了绿色的方块,同时打印了标签和置信度。
6. 总结
本文档详细介绍了目标检测的基础知识及 PaddleDetection 的基本概念,并提供了详细的API文档说明,帮助开发者理解和实现目标检测与可视化功能。通过上述流程,可以构建高效的实时目标检测系统,满足多种应用场景的需求。
审核编辑 黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
瑞芯微RKNPU开发全指南:从环境搭建到性能优化,一文搞定边缘AI部署2026-02-06 4772
-
Rockchip RV1106系列规格差异详解:如何选择最适合您的AI视觉处理器?2025-06-16 5107
-
基于LockAI视觉识别模块:C++目标检测2025-06-06 1130
-
瑞芯微rv1106开发资料 rv1106数据手册 rv1106详细说明书免费下载2025-05-19 8298
-
RV1106核心特性概述2025-02-11 6406
-
大联大控股世平推出基于瑞芯微RV1106的低功耗AOV IPC方案2024-12-11 3051
-
Cortex-A8的RealView平台基板用户指南2023-08-08 741
-
RV1106网口灯控制脚2023-06-21 6353
-
怎么去写基于RV1126平台的imx291驱动源码呢2022-03-10 3674
全部0条评论

快来发表一下你的评论吧 !
