

RobotStudio的介绍以及ABB机器人的位置及速度概述
电子说
描述
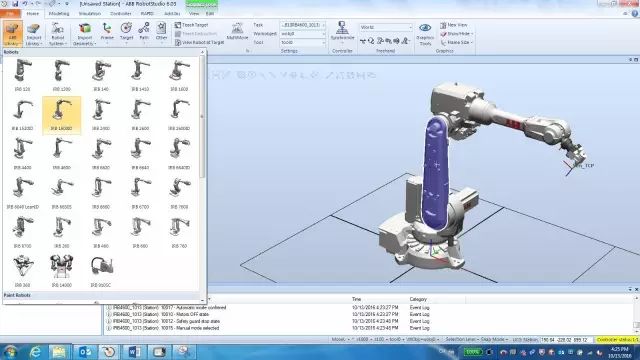
RobotStudio是ABB机器人的离线仿真调试软件,还可支持VR体验。
今天就来好好介绍一下这款ABB机器人的专属强大软件!
1
支持所有ABB机器人模型以及变位机,导轨等。
2
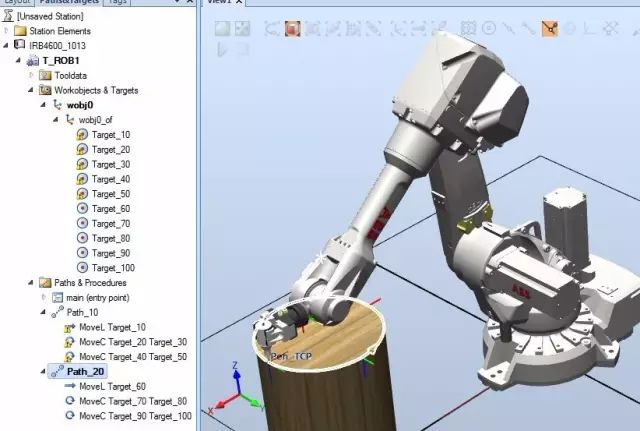
完全和现场实际应用一样的示教器操作,机器人运动仿真与真实一致,真正可以做到在RobotStudio里所见即真实环境所得。

3
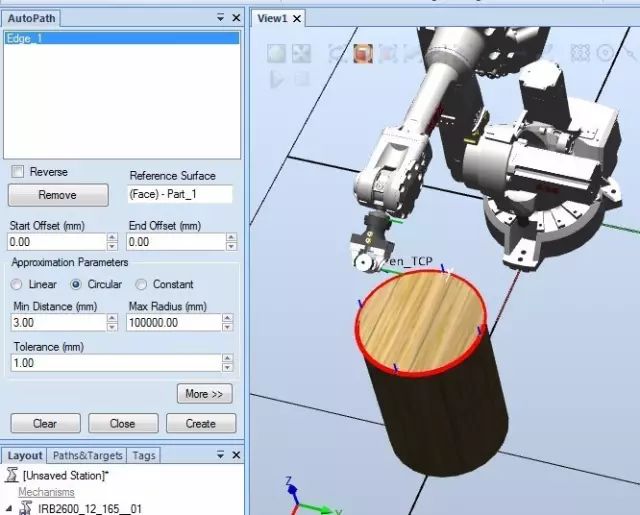
丰富的离线轨迹自动生成功能,支持多种数模导入,机器人轨迹自动生成,免去人工现场调试带来的繁重重复工作。
4
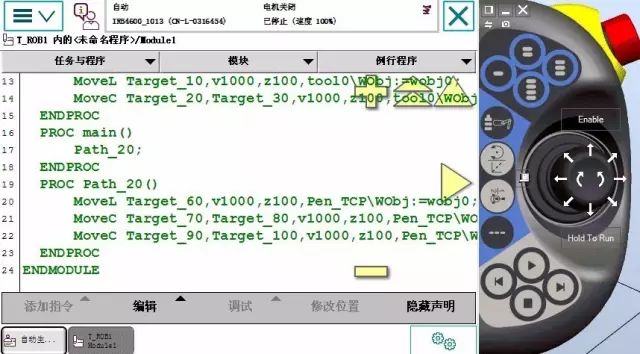
简介高效的代码调试环境
5
丰富的powerpac(RobotStudio插件)功能,针对不同行业,快速解决机器人轨迹生成,编程问题等。比如Machining Powerpac,针对如下轨迹应用快捷方便。
6
机器人的位置及速度和我们一般理解的位置和速度可是有些不同的哦~
1. ABB 机器人中用来表示位置的数据类型是:
Robtarget 用于定义移动机械臂和附加轴的移动指令中的位置。
jointtarget 用于确定通过指令MoveAbsJ 而将机械臂和外轴移动到的位置。
2. ABB 机器人中用来表示速度的数据类型是:
Speeddata 用于规定机械臂和外轴均开始移动时的速率。
3. robtarget 的构成部分如下。
v_tcp 用mm 来表示工具中心点的位置(x、y 和z)。规定相对于当前目标坐标系的位置,包括程序位移。如果未规定任何工件,则为世界坐标系。
v_ori 工具方位,以四元数的形式表示(q1、q2、q3 和q4)。
v_leax 机械臂的轴配置(cf1、cf4、cf6 和cfx)。
v_reax 附加轴的位置。
4. jointtarget 的构成部分如下。
robax 机械臂轴的轴位置,以度数计。
extax 外轴的位置。对于旋转轴,其位置定义为从校准位置起旋转的度数。对于线性轴,其位置定义为与校准位置的距离(以mm 计)。未定义的外轴,值9E9
5. speeddata 的构成部分如下:
v_tcp 工具中心点的速率,以mm/s 计
v_ori TCP 的重新定位速率,以度/秒表示。
v_leax 线性外轴的速率,以mm/s 计。
v_reax 旋转外轴的速率,以度/秒计。
- 相关推荐
- 热点推荐
- ABB机器人
- RobotStudio
-
abb机器人怎么设置原点位置信号2024-06-17 4929
-
Abb工业机器人的主电源开关在什么位置2024-06-16 3873
-
ABB机器人线速度_青岛ABB机器人发生电源故障维修2022-01-11 2245
-
工业机器人仿真与编程2021-09-07 2392
-
Robotstudio软件:工作站中多台机器人I/O通信仿真实现分享2021-07-02 2518
-
ABB机器人实训平台实验2021-07-01 2725
-
ABB焊接机器人伺服电机维修常见故障相关资料分享2021-06-28 1777
-
ABB机器人维修保养指南2020-08-19 5971
-
ABB机器人的IRC5和RobotStudio入门手册免费下载2020-04-23 1823
-
ABB机器人的RobotStudio操作手册免费下载2019-11-15 2334
-
零基础玩转工业机器人2018-10-29 4988
-
工业机器人虚拟仿真软件是一个很好的工业机器人入门途径2018-02-07 36049
-
ABB机器人操作员手册RobotStudio2016-08-19 1443
-
ABB IRB5400-喷涂工业机器人2015-01-14 10053
全部0条评论

快来发表一下你的评论吧 !
