

TWR-MECH塔式系统机电一体化电路板主要特性
机器人
描述
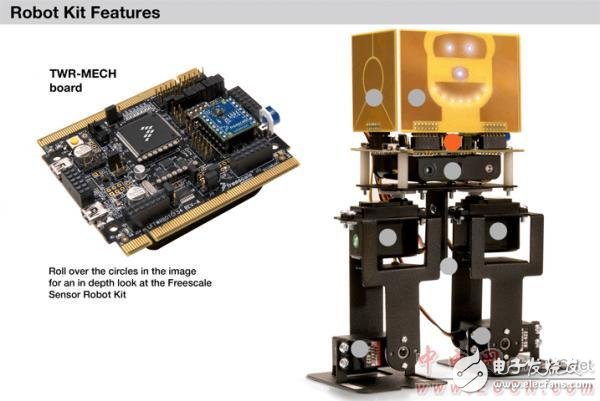
freescale公司的塔式机电一体化机器人中演示的飞思卡尔塔式机电一体化电路板TWR-MECH是一款易于使用的机电一体化开发和演示平台。塔式系统机电一体化电路板有一个3轴加速度传感器,3轴磁力计和一个12通道触摸传感器。它可以使用CodeWarrior和一个板载OSBDM闪存编程工具通过C/C++语言进行编程。对于快速原型设计或没有C/C++经验的人员,可以通过Stick OS支持塔式系统机电一体化电路板。本文介绍了TWR-MECH塔式系统机电一体化电路板主要特性和电路图。
飞思卡尔塔式机电一体化机器人中演示的飞思卡尔塔式机电一体化电路板是一款易于使用的机电一体化开发和演示平台。
塔式系统机电一体化电路板有一个3轴加速度传感器、3轴磁力计和一个12通道触摸传感器。它可以使用CodeWarrior和一个板载OSBDM闪存编程工具通过C/C++语言进行编程。对于快速原型设计或没有C/C++经验的人员,可以通过Stick OS支持塔式系统机电一体化电路板。
TWR-MECH塔式系统机电一体化电路板主要特性:
MCF52259 32位MCU,具有64K RAM,512K闪存
MPR121电容式触摸传感器
MMA8451Q 3轴加速度传感器
可选的插件式传感器子板可用于:触摸,加速度传感器,磁力计
最多可以控制8个PWM RC伺服电机(兼容VEX™ 3线服务器)
可以独立使用,或插入塔式系统使用
内置开源BDM(带有USB的8位9S08JM60 MCU)
可以使用CodeWarrior通过C/C++语言进行编程
由Stick OS提供支持
套件包含:
带有MCF52259 32位MCU的TWR-MECH电路板
4个PWM控制的RC伺服系统
腿部控制机制和相关硬件
双足4DOF行走机器人组装说明
用户指南文档
快速入门指南文档
支持的器件
MAG3110: 飞思卡尔高精度3D磁力计
MMA8451Q: ±2g/±4g/±8g,低重力加速度,14位数字加速度传感器
MCF5225X: 一站式连接32位微控制器
MPR121: 接近电容式触摸传感器控制器

图1.机器人主要特性和外形图
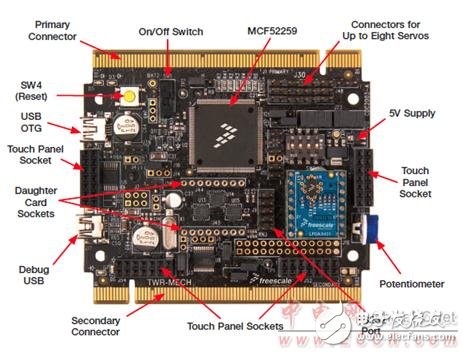
图2. TWR-MECH塔式系统机电一体化电路板外形图
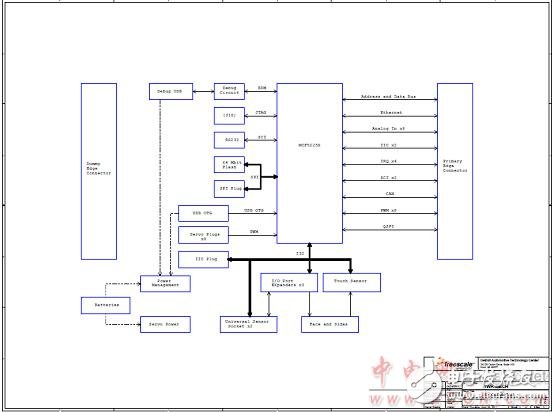
图3. TWR-MECH塔式系统机电一体化电路板电路图(1)
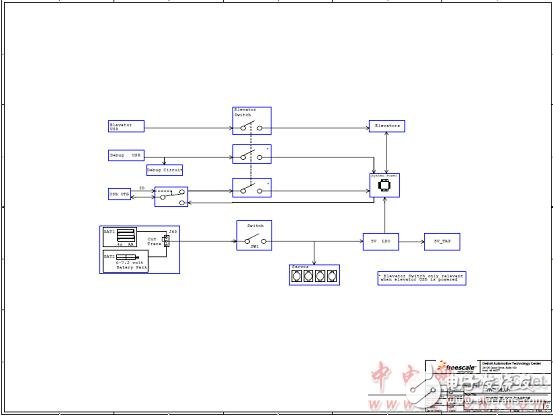
图4. TWR-MECH塔式系统机电一体化电路板电路图(2)
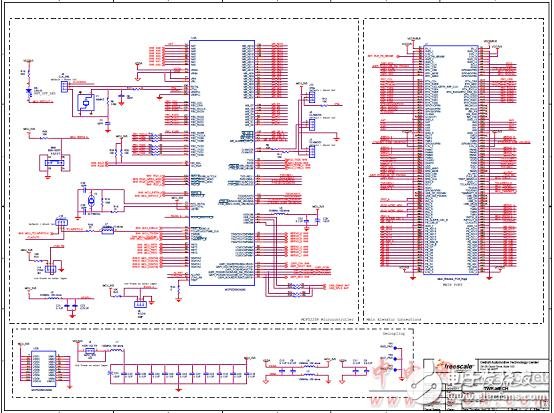
图5. TWR-MECH塔式系统机电一体化电路板电路图(3)
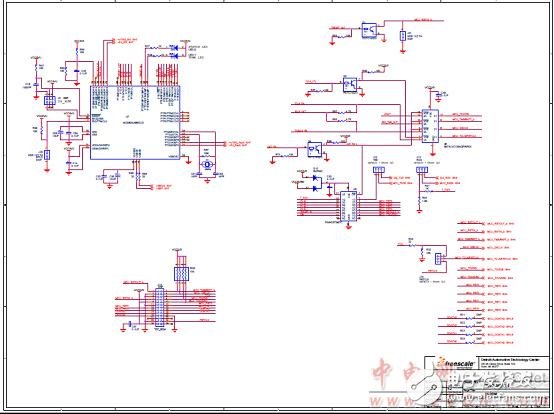
图6. TWR-MECH塔式系统机电一体化电路板电路图(4)
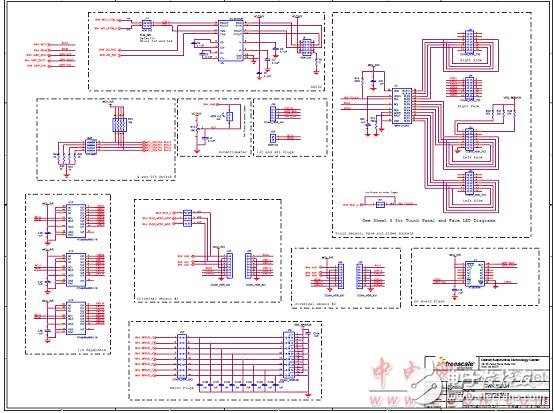
图7. TWR-MECH塔式系统机电一体化电路板电路图(5)
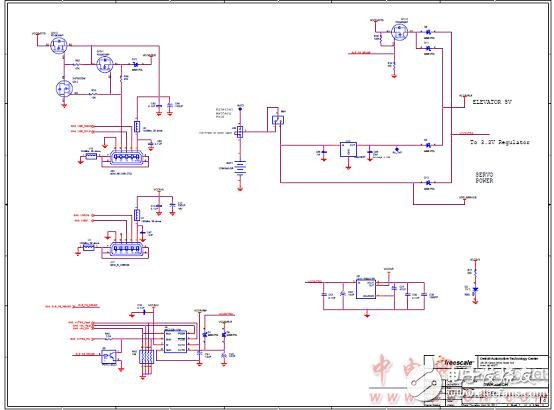
图8. TWR-MECH塔式系统机电一体化电路板电路图(6)
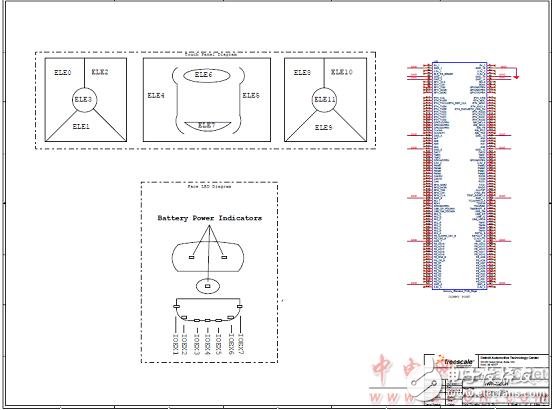
图9. TWR-MECH塔式系统机电一体化电路板电路图(7)
飞思卡尔机电一体化机器人是一款易于使用的机电一体化开发和演示平台,用于采用TWR-MECH板运行的飞思卡尔机器人套件。
特性
金属四自由度双足行走机器人
与加速度传感器、磁力计和触摸板结合使用
4个PWM控制的RC伺服电机
具有12个触摸板的富有表现力的“脸”,和7个用于用户交互的LED
轻松添加您自己的传感器和使用的附件;I²C、SPI、A/D或通用IO
可以使用CodeWarrior通过C/C++语言进行编程
由Stick OS提供支持
详情请见:
和?fpsp=1&WT_TYPE=Fact%20Sheets&WT_VENDOR=FREESCALE&WT_FILE_FORMAT=pdf&WT_ASSET=Documentation&fileExt=.pdf
以及
TWR-MECH_SCH.pdf
TWRMECHFS.pdf
- 相关推荐
- 热点推荐
- 机器人
-
光机电气一体化控制实训系统是由哪些部分组成的2021-09-26 1911
-
光机电气一体化控制实训系统2021-07-02 1863
-
如何实现机电一体化设计?2019-08-07 3895
-
机电一体化系统设计手册2017-11-24 1724
-
什么是机电一体化2017-08-29 4576
-
《机电一体化--机械设计》平面四杆机构的基本特性2017-07-22 2589
-
浅析机电一体化的发展趋势2012-10-21 3611
-
机电一体化系统的抗干扰措施2009-04-11 1279
-
机电一体化课程课件2008-12-13 3754
-
机电一体化技术与系统课件2008-11-20 1312
全部0条评论

快来发表一下你的评论吧 !
