

不借助Linux系统,在Windows下如何搭建ZMC900E交叉编译环境
描述
不需要依赖笨重的虚拟机,也不需要安装双系统。抛开繁琐的环境准备,在Windows上轻松搭建交叉编译环境。本文将介绍如何在Windows上搭建交叉编译环境,不借助Linux系统,直接进行交叉编译。
 前言
前言
嵌入式Linux系统,由于系统资源的匮乏,通常无法安装本地编译器进行本地开发,而需要在借助一台主机进行交叉开发。一般情况下,在主机安装相应的交叉编译器,将在主机编辑好的程序交叉编译后,通过一定方式如以太网或者串口将程序下载到目标系统运行,或者进行调试。一般的交叉开发流程如图1所示。
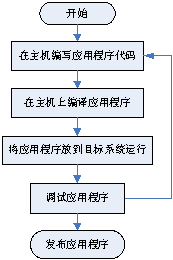
图1 嵌入式Linux交叉开发一般流程
ZMC600E/900E开发的一般模型如图2所示。通常需要一台PC主机,在其中安装好各种进行交叉编译所需要的软件,通过串口和以太网和目标板相连。在主机上进行程序编辑和编译,得到的可执行文件通过串口或者以太网下载到ZMC600E/900E中运行或者进行调试。
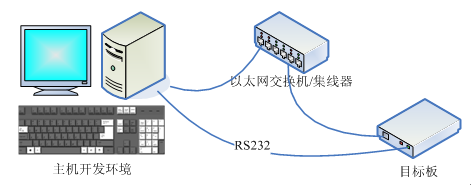
图2 嵌入式Linux交叉开发一般流程通常
常见的交叉编译环境中,主机会选用Linux系统。如果主机是Windows系统,通常会采用虚拟机的方式运行Linux系统来搭建环境。其实Windows系统中同样也可以搭建交叉编译环境,在Windows上就可以开发ZMC600E/900E的程序,接下来将介绍如何实现。 测试环境
1. 远程设备:ZMC900E主站控制器2. 主机:Win103. IDE: VS Code4. 所需软件环境:
- cmake版本3.xx,推荐3.20及以上版本
- mingw64(主要需要mingw32-make.exe)获取最新版本s
- aarch64-linux-gnu(windows)交叉编译链,包括:① 编译器aarch64-linux-gnu-gcc.exe aarch64-linux-gnu-g++.exe等;② aarch64-linux-gnu.cmake 交叉编译工具链配置文件;③ 可以联系我们技术支持获取。
5. VSCode需要的插件:
- C/C++
- C/C++ Extension Pack
- CMake
- CMake Integration
- CMake Tools
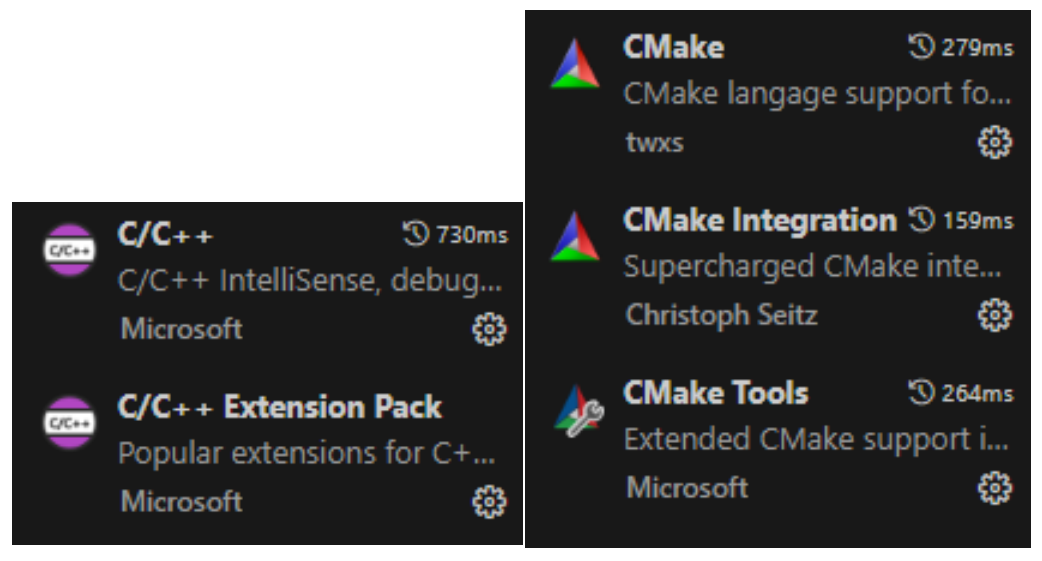 图3 VSCode中需要的插件6. 环境变量:
图3 VSCode中需要的插件6. 环境变量:
- 将交叉编译链解压到D:/aarch64-linux-gnu(或其他容易找到的地方),将D:/aarch64-linux-gnu/bin 加入环境变量。
- 将CMake和mingw64也加入到环境变量。
- 重启使其生效。
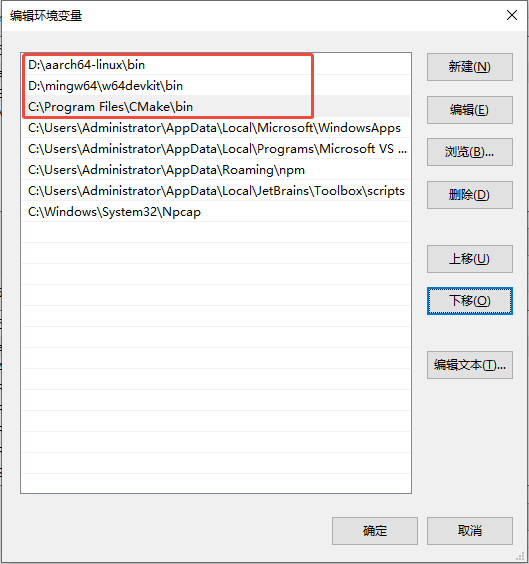
图4 Windows环境变量配置 搭建交叉编译链
本节以hello_world和ecat_io为例子,介绍如何搭建交叉编译工具链,并通过powershell命令行进行交叉编译。
1. 安装软件环境&设置环境变量
根据第1节介绍,在本节需要准备cmake、mingw64、aarch64-linux-gnu(windows)三个工具软件,并配置环境变量。
2. 准备交叉编译工具链说明文件CMAKE_TOOLCHAIN_FILE
在前述交叉编译链解压路径 D:/aarch64-linux-gnu/bin 路径下新建文件arm-linux-toolchain.cmake,并添加以下内容:
# arm-linux-toolchain.cmakeset(CMAKE_SYSTEM_NAME Linux)set(CMAKE_SYSTEM_PROCESSOR arm)
# 设置编译器路径set(CROSS_CHAIN_PATH ${CMAKE_CURRENT_LIST_DIR})# 根据你的安装路径调整交叉编译工具链的位set(CMAKE_C_COMPILER ${CROSS_CHAIN_PATH}/aarch64-linux-gnu-gcc.exe)set(CMAKE_CXX_COMPILER ${CROSS_CHAIN_PATH}/aarch64-linux-gnu-g++.exe)set(CMAKE_LINKER ${CROSS_CHAIN_PATH}/aarch64-linux-gnu-ld.exe)set(CMAKE_AR ${CROSS_CHAIN_PATH}/aarch64-linux-gnu-ar.exe)set(CMAKE_RANLIB ${CROSS_CHAIN_PATH}/aarch64-linux-gnu-ranlib.exe)
3. hello_world示例
新建文件夹,在文件夹下创建CMakeLists.txt文件,以及main.c源代码文件。在CMakeLists.txt中写入以下内容。
cmake_minimum_required(VERSION 3.20)project(hello)add_executable(hello main.c)
在main.c中写入以下内容:
#include
intmain(int argc, char **argv){ printf("Hello world!\n"); return0;}
然后打开powershell,cd至当前目录,并新建build文件夹,此时当前目录下会有以下文件:
zmc├── build├── CMakeLists.txt└── main.
接下来在powershell下执行以下指令,进行交叉编译
cd buildcmake -G "MinGW Makefiles" -DCMAKE_TOOLCHAIN_FILE="D:\aarch64-linux\bin\aarch64-linux-gnu.cmake" ..mingw32-make.exe
其中:
- cmake的-G “MinGW Makefiles”参数用于指定生成的工程类型,此处指定为MinGW工程。
- -DCMAKE_TOOLCHAIN_FILE=”D:\aarch64-linux\bin\aarch64-linux-gnu.cmake”,-D参数声明了一个变量CMAKE_TOOLCHAIN_FILE,该变量用于指定通过cmake生成交叉编译工程时,交叉编译工具链的配置文件。
- cmake ..,目前位于build文件夹下,..表示指定上层目录中../CMakeLists.txt作为cmake生成的参考文件。
完成后将在build目录下生成一个hello文件,该文件为Linux arm格式的可执行文件,需要上传到ZMC900E运行,运行效果如下。

图5 测试hello_world
4. ecat_io示例
从“【ZMC900E】在线资料包 examples\zmc.zip”中获取demo程序,其结构如下:
zmc├── demo│ ├── ecat_io│ │ ├── Makefile│ │ ├── test.c│ │ └── test.xml│ ├── ecat_redundance│ ├── ecat_servo│ ├── esi_update│ ├── foe│ └── master├── include│ └── ecat│ ├── zecm_ex.h│ └── zecm_zh.h└── lib└── libzecm.so
打开demo/ecat_io示例,新建CMakeLists.txt文件,写入以下内容:
cmake_minimum_required(VERSION 3.10)
project(ecat_io)
include_directories("../../include")link_directories("../../lib")
add_executable(test test.c)
target_link_options(test PRIVATE -lpthread -lrt -ldl -lstdc++ -lm)target_link_libraries(test zecm)
根据实际测试从站对主站程序test.c做相应修改,具体请参考倍福I/O端子操作示例:https://manual.zlg.cn/web/#/211/11214接下来在powershell下执行以下指令,进行交叉编译。
cd buildcmake -G "MinGW Makefiles" -DCMAKE_TOOLCHAIN_FILE="D:\aarch64-linux\bin\aarch64-linux-gnu.cmake" ..mingw32-make.exe
完成后将在build目录下生成一个test文件,该文件为Linux arm格式的可执行文件。需要将test、test.xml、libzecm.so都上传到ZMC900E运行。 VSCode搭建图形化交叉编译环境
1. VSCode配置CMakeTool
此步骤用到的工具链:CMake + make(来自mingw64里包含的mingw32-make.exe) + aarch64-linux-gnu + VS Code&插件CMake等。如果失败需要检查工具链上每一环节是否工作正常。首先,需要先自己写一个给CMake用的交叉编译工具链配置文件。可以参照第2.2节内容。用VSCode打开项目文件夹,例如前面测试的ecat_io示例。然后按ctrl+shift+P,弹出菜单,输入CMAKE查找到CMAKE: QUICK START选项:
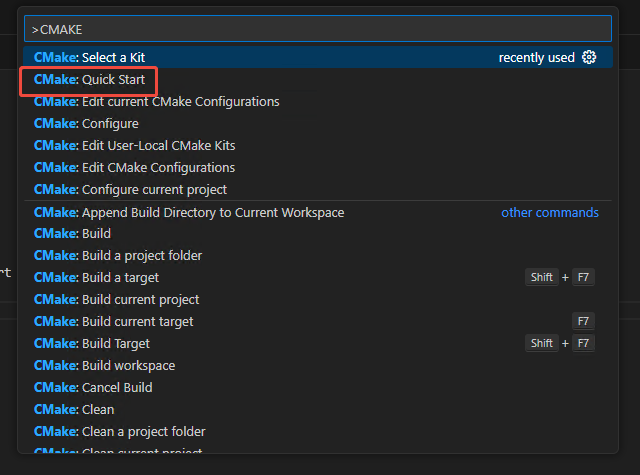
图6 CMakeTool工具配置Quick Start点击Add a new preset,然后选择Toolchain File,然后输入aarch64(或其他任意)作为配置项名称。完成后会生成一个CMakePresets.json配置文件。修改其中配置,令其关联到 mingw32-make.exe + aarch64-linux-gnu。
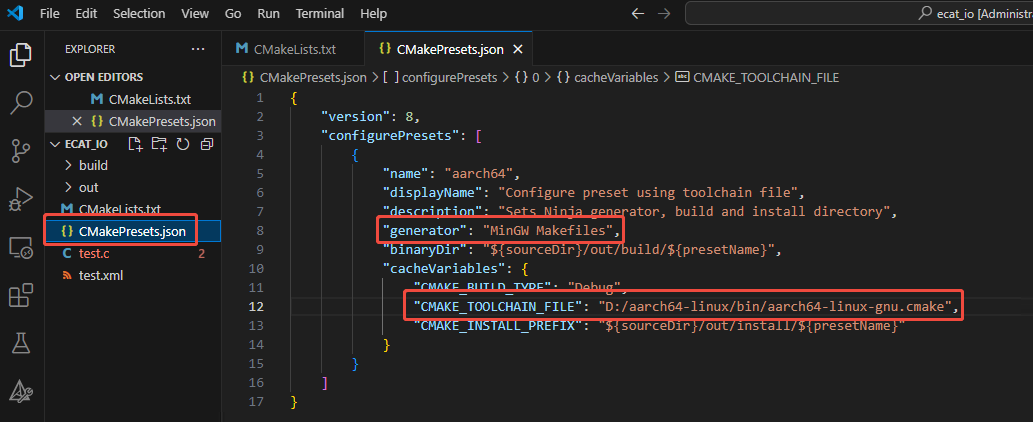
图7 配置CMakePresets.json
完成后,保存配置文件,点击左侧工具栏的CMake一栏,找到Delete Cache and Reconfigure,重新生成CMake工程。
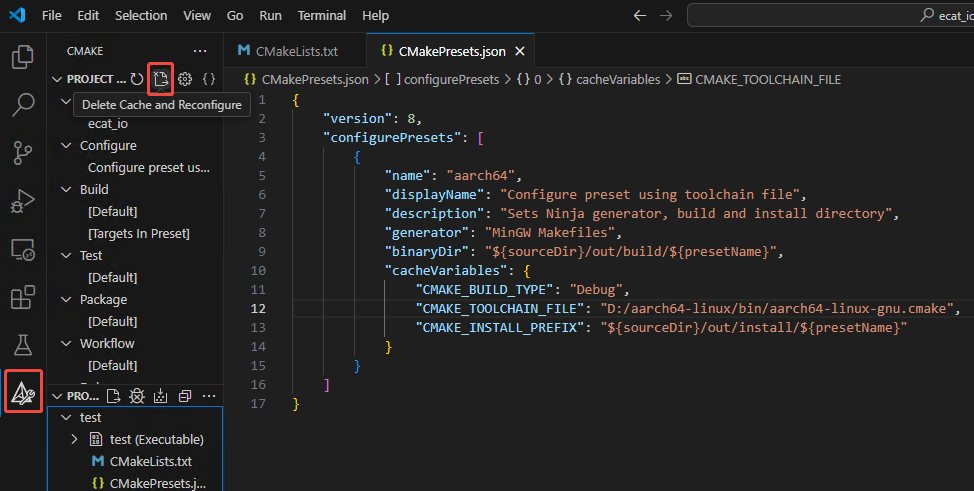
图8 生成CMake工程查看下侧Output输出,若无报错,则表示CMake配置成功。
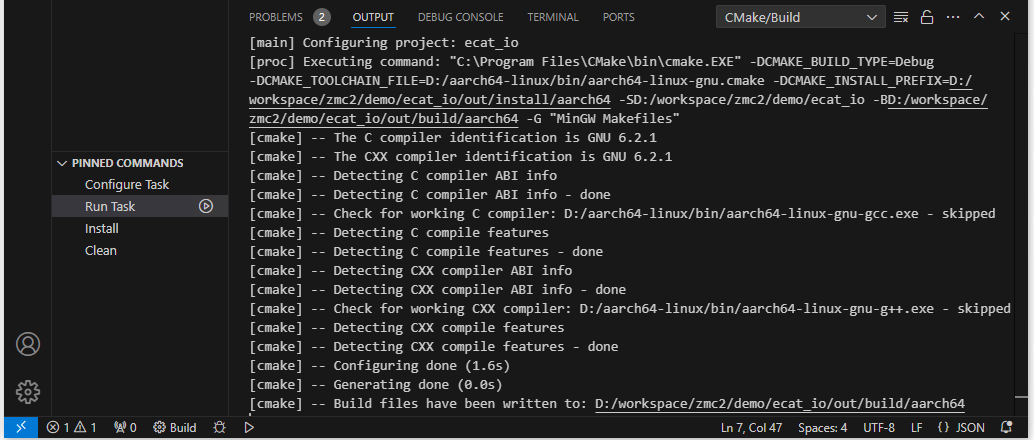
图9 VSCode Output无报错输出
2. VSCode + CMakeTool图形化编译
在右侧工具栏点击CMAKE项,切换到图形化编译页面:
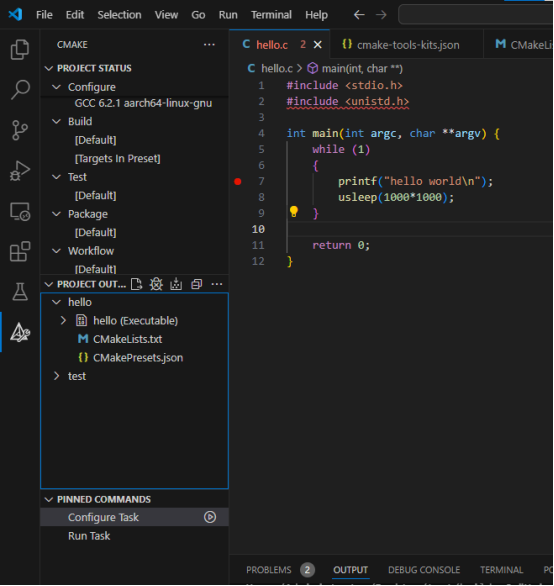
图10 图形化编译界面
 是cmake生成Makfile,
是cmake生成Makfile, 是编译,底部工具栏的
是编译,底部工具栏的 也是编译。先生成cmake工程,后编译程序。根据CMakePresets.json配置,输出路径为out文件夹,可以找到完成编译的程序test。此时如果通过linux的file工具查看该程序的格式可以验证其是arm程序且有debug信息。
也是编译。先生成cmake工程,后编译程序。根据CMakePresets.json配置,输出路径为out文件夹,可以找到完成编译的程序test。此时如果通过linux的file工具查看该程序的格式可以验证其是arm程序且有debug信息。
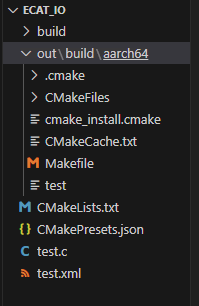
图11 工程目录结构
cd buildcmake -G "MinGW Makefiles" -DCMAKE_TOOLCHAIN_FILE="D:\aarch64-linux\bin\aarch64-linux-gnu.cmake" ..mingw32-make.ex
将test程序、动态库libzecm.so、ENI文件上传到ZMC900E同一目录下,并给test程序加上x权限。然后就可以执行主站程序了。
# ZMC900E$ chmod +x test$ lstest ENI.xml libzecm.so
ZMC900E高性能EtherCAT主站控制器

图12 ZMC900E高性能EtherCAT主站控制器
ZMC900E 是ZLG致远电子开发的最新一代EtherCAT主站控制器,其核心采用多核异构的应用处理器,内核包括4+1个64位的ArmCortex-A55核,主频2GHz;3个Cortex-R5F内核,主频800MHz。同时板载4GB LPDDR4、8GB eMMC以及32KB FRAM。
ZMC900E EtherCAT主站控制器为了满足不同的自动化应用需求,集成1路专用EtherCAT口、3路通用以太网、1路CANFD、1路RS485、1路TF卡、1路USB3.0 Host、1路HDMI接口、16路Dl数字输入、16路DO数字输出等接口,灵活满足自动化设备应用需求。
ZMC900E 示意图及接口图如下所示:
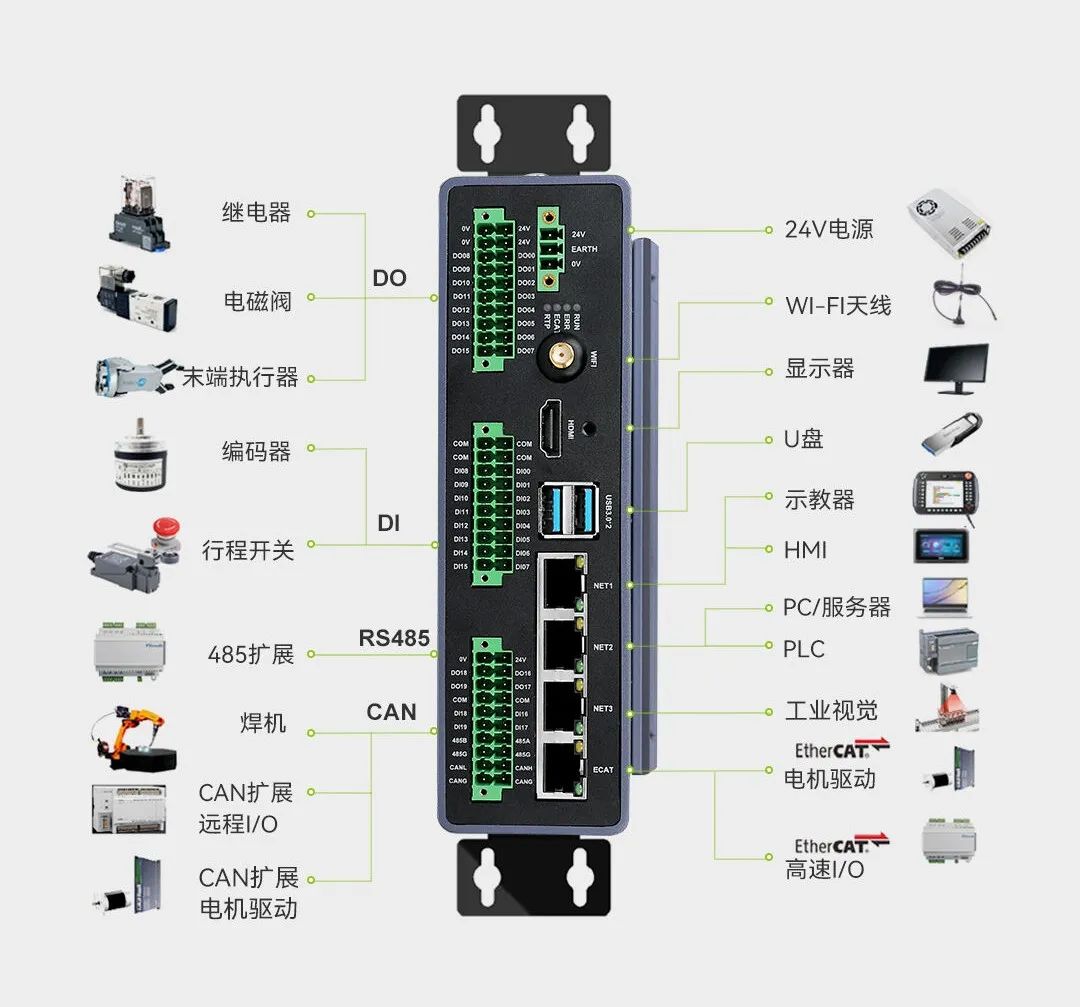
图13 ZMC900E接口
-
ZMC900E如何确保嵌入式数据的可靠性2026-07-03 107
-
基于ZMC900E的无线模块应用-WiFi篇2026-07-02 160
-
基于ZMC900E的无线模块应用 — 4G篇2026-07-01 136
-
深入ZMC900E:主站控制器编码器的使用与优势2025-09-11 1131
-
解锁PWM功能:ZMC900E主站控制器的高效应用指南2025-09-05 1066
-
如何使用VSCode+gdbserver远程调试ZMC900E2025-05-22 1500
-
ZMC900E控制器之ROS2环境安装指南2024-04-29 2127
-
ZMC900E 国产EtherCAT主站控制器 — 电源口传导骚扰整改2024-03-07 2520
-
Windows搭建OpenHarmony编译环境2023-08-09 3307
-
3568编译环境搭建2021-12-13 1286
-
嵌入式Linux开发环境搭建-(4)安装交叉编译工具链2021-11-02 1197
-
想要自学搭建嵌入式Linux开发环境搭建的同学有福利了。2018-05-31 2553
-
Windows下STM32单片机eclipse编译环境搭建2017-10-20 2918
-
嵌入式交叉编译环境的搭建解析2017-10-18 1262
全部0条评论

快来发表一下你的评论吧 !
