

ADAS系统的协作式动作管理控制架构理念
汽车电子
描述
据外媒报道,英国拉夫堡大学(Loughborough University)与捷豹路虎提出了ADAS系统的协作式动作管理控制架构(coordinated control architecture for motion management)理念,旨在提升所有车辆的安全性及舒适性,适用于所有ADAS规格。
如今,在应用的ADAS系统种类繁多,该类系统通常都能为用户提供特色功能,可借助车载系统的新增控制件来实现,例如:制动或转向系统。ADAS系统通常被用作驾驶员的辅助工具,但不得被用于代替驾驶员完成车辆的驾驶操控。
ADAS系统的物理建模与控制架构是利用MATLAB/Simulink来执行的,该类开放性平台可供各方开展进一步的研发工作。有一支团队预计到,在动态模式下,该架构不易受细节变化的影响。
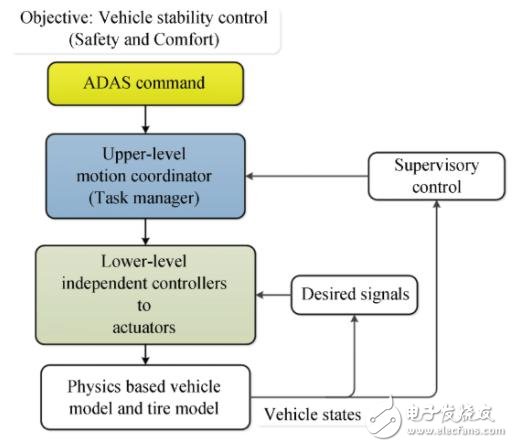
该款协作式动作管理控制架构分为四个层级:最顶端为ADAS级,负责生成作为指令的理想行驶轨迹(ideal trajectory)。第二层级为高级别(任务管理器,task manager)的动作协调器;第三层为低级别的协作式动态控制器;最后一层为底层的车辆动力学模型(vehicle dynamics model)。
研究团队在模拟器上运行各类综合性信息,旨在分析在车辆变道时,各独立系统是如何影响车辆行驶轨迹(vehicle trajectory)的。
他(她)们发现,转向系统将导致模拟车辆脱离目标,而制动系统的制度幅度过大(overshot)。
研究人员将继续致力于拓展系统控制架构体系,从而更好地研发ADAS协作式控制。他们将会检验新系统是如何与当前系统进行干涉,以便全面了解该系统的控制性能及稳定性。
该研究获得了拉夫堡大学模拟创新项目的支持。
-
【「鸿蒙操作系统设计原理与架构」阅读体验】02-华为鸿蒙设计理念2025-02-23 3628
-
ADAS系统组成简介#ADAS北汇信息POLELINK 2024-08-03
-
汽车架构推动ADAS系统架构向前发展2022-12-08 1355
-
ADAS系统的发展2022-11-21 1431
-
汽车ADAS域控制器SoC架构介绍2022-10-12 5174
-
非IP架构光纤KVM坐席协作管理的解决方案2022-01-21 1879
-
如何去实现一种基于毫米波雷达的ADAS系统架构呢2021-12-23 2326
-
电池管理系统的硬件架构2021-09-15 2366
-
IBM Engineering Workflow Management—软件协作开发管理平台2021-07-09 2361
-
数字电源管理的几种主要架构2020-12-31 1991
-
分布式KVM系统解决方案,坐席协作管理有什么用怎么用哪里用2020-03-12 4597
-
数字电源管理架构的探讨2018-09-26 1850
-
ADAS系统的最新发展2018-09-17 2305
-
嵌入式系统电源管理架构的研究与实现2017-06-14 1079
全部0条评论

快来发表一下你的评论吧 !
