

自动驾驶技术的发展趋势_AI应用现状分析
汽车电子
描述
1.自动驾驶技术的发展趋势与 AI 应用现状分析
1.1 自动驾驶技术发展现状
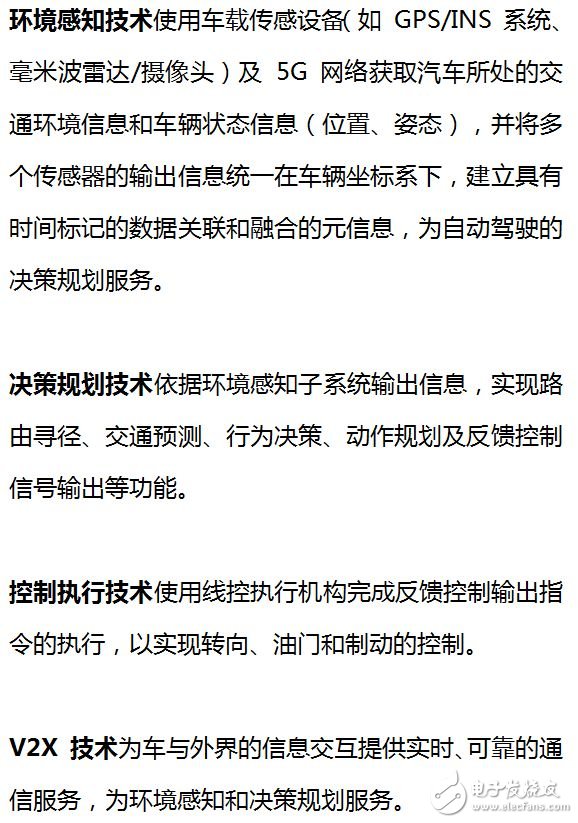
自动驾驶汽车是一个机电一体、软硬件高度集成、以最终实现替代人操作的复杂信息物理融合系统,主要由感知、决策和执行子系统构成,自动驾驶技术涉及环境感知、决策规划、控制执行、V2X 通信等关键技术,其结构如图 1 所示。
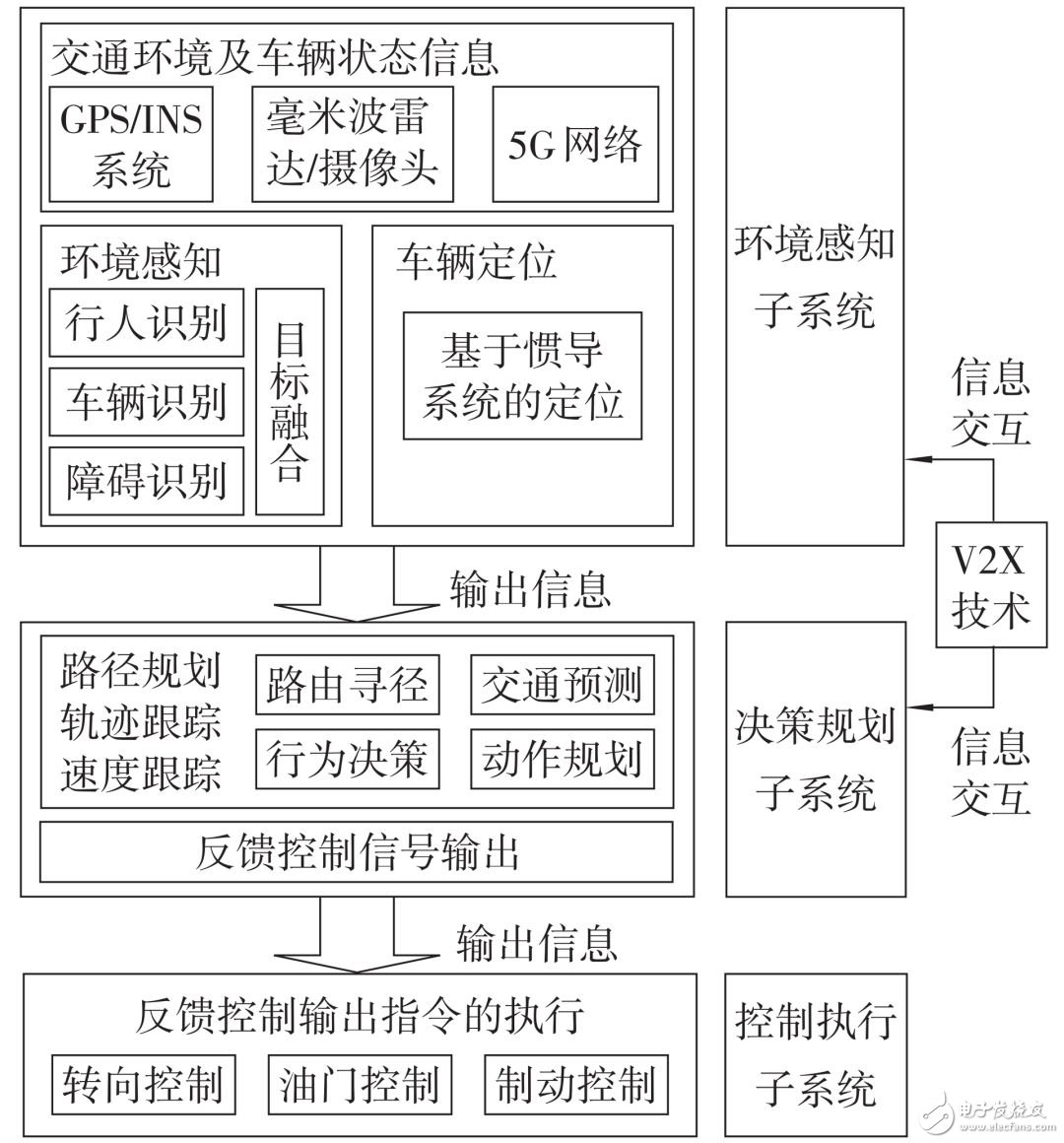
图 1 自动驾驶汽车分层结构示意图
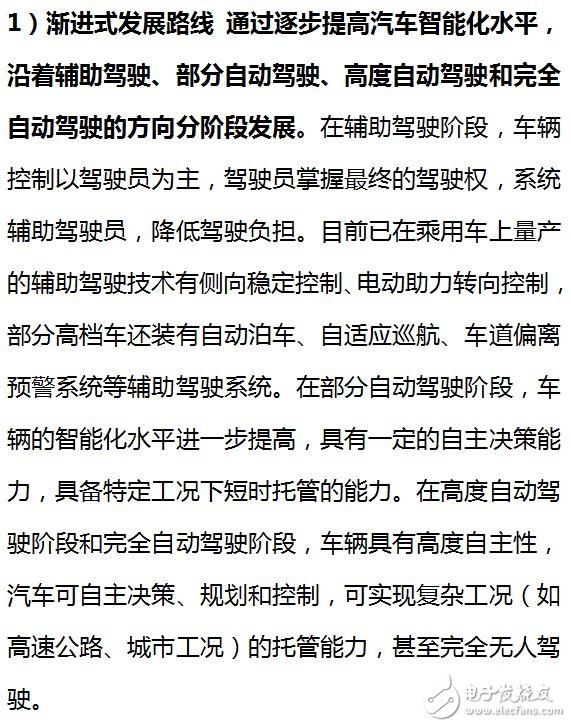
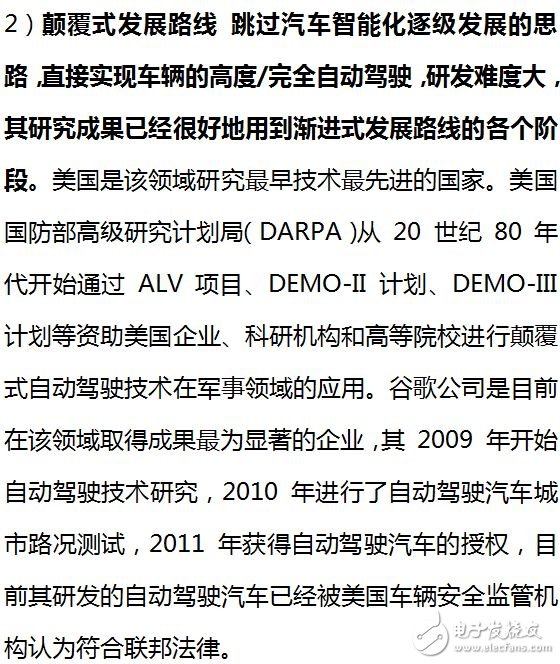
1.1.1 自动驾驶发展路线
1.1.2 我国自动驾驶技术发展现状
1.2 AI 在自动驾驶中的应用现状与挑战
1.2.1人工智能技术简介
AI 是一门研究模拟、延伸和扩展人类智能的理论、方法及技术的科学,其诞生于 20 世纪 50 年代,目前发展为计算机视觉、自然语言理解与交流、认知与推理、机器人学、博弈与伦理和机器学习六大领域,并呈现出各领域相互渗透的趋势。
其中,机器学习研究如何在算法的指导下自动学习输入数据样本的数据结构和内在规律并获得新的经验与知识,从而对新样本进行智能识别,甚至对未来进行预测 。典型的机器学习算法有线性回归、K-均值、K-近邻、主成份分析、支持向量机、决策树、人工神经网络等。
在人工神经网络基础上发展起来的深度学习模型是当前最为有效的机器学习算法模型之一,成为当前人工智能研究与应用的热点。深度学习模型在人工神经网络中加入了多个隐层,于 2006 年由 Geoffrey Hinton 和 Ruslan Salakhutdinov 提出。由于在 2012 年的 ImageNet 比赛(计算机视觉领域最具影响力的国际比赛)中成绩突出,深度学习模型受到社会各界的极大关注,并在多个领域取得研究进展,出现了一批成功的商业应用,如谷歌翻译、苹果语音工具 Siri、微软的 Cortana 个人语音助手、蚂蚁金服的扫脸技术、谷歌的 AlphaGo 等。
1.2.2 人工智能在自动驾驶技术中的应用
AI 在自动驾驶技术中有着丰富的应用,诸如深度学习、增强学习都在自动驾驶技术中取得较好的研究结果。
1)环境感知领域
感知处理是 AI 在自动驾驶中的典型应用场景。如基于 HOG 特征的行人检测技术在提取图像的 HOG 特征后通常通过支持向量机算法进行行人检测;基于激光雷达与摄像头的车辆检测技术中,需对激光雷达数据做聚类处理;线性回归算法、支持向量机算法、人工神经网络算法也常被用于车道线和交通标志的检测。
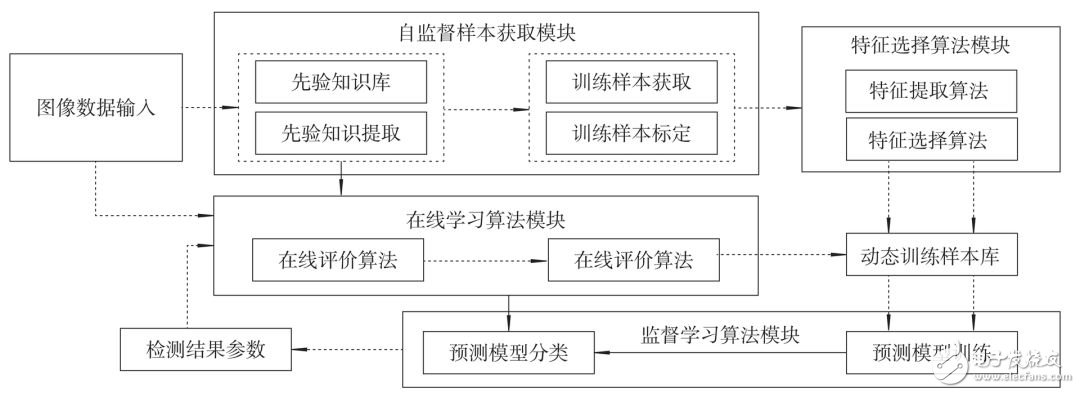
图 2 基于机器学习的非结构化道路检测框架
图 2[7]所示的框架把机器学习用到乡村公路、野外土路等非结构化道路的检测中。由于车辆行驶环境复杂,已有感知技术在检测与识别精度方面尚无法满足自动驾驶的需要,基于深度学习的图像处理成为自动驾驶视觉感知的重要支撑[8]。在感知融合环节,常用的 AI 方法有贝叶斯估计、统计决策理论、证据理论、模糊推理,、神经网络以及产生式规则等。
2)决策规划领域
决策规划处理是 AI 在自动驾驶中的另一个重要应用场景,状态机、决策树、贝叶斯网络等 AI 方法已有大量应用。近年来兴起的深度学习与强化学习能通过大量学习实现对复杂工况的决策,并能进行在线学习优化,由于需要较多的计算资源,当前是计算机与互联网领域研究自动驾驶规划决策处理的热门技术 [8]。
3)控制执行领域
传统控制方法有 PID 控制、滑模控制、模糊控制、模型预测控制等。智能控制方法主要有基于模型的控制、神经网络控制和深度学习方法等。
1.2.3 自动驾驶领域AI应用面临的挑战
当前,以深度学习为代表的当代 AI 技术,基于在机器视觉(MV)、自然语言处理(NLP)等领域的成功应用,被引入到自动驾驶技术的环境感知、决策规划和控制执行的研究中,获得了较好的效果。
由于车辆行驶环境复杂,一些严重依赖于数据、计算资源和算法的 AI 技术,在自动驾驶的感知、决策、执行等环节尚无法满足实时性需求,一些以其作为核心支撑的自动驾驶系统原型面临挑战:
1)实时可靠性需求给系统的计算速度和计算可靠性带来挑战。自动驾驶系统要求感知、决策和执行各子系统的响应必须是实时可靠的,因此需要系统提供高速可靠的计算能力。
2)部件小型化的产业化需求使目前系统庞大的硬件尺寸面临挑战。当前的自动驾驶系统原型大多是计算机系统或工控机系统,不满足车规级部件需求。
3)个性化适配无法满足。当前兴起的深度学习算法对应用环境变异的自适应性较差,对不同车型和不同场景存在模型重新训练的适配问题,已有的自动驾驶系统原型不能满足。
4)自主学习、自主维护需求无法满足。深度学习呈现出学习集越大,效果越好的特点,由此需要自动驾驶系统具备持续自主学习能力,而已有的自动驾驶原型无法满足。面对老化、磨损等问题,部件出厂时的标定参数不再处于最优状态,自动驾驶系统需要基于汽车行驶数据、性能评价进行智能整定(自标定)、诊断和维护,已有的自动驾驶原型也无法满足需求。
5)成本控制面临挑战。当前自动驾驶系统原型造价尚不满足产业化成本需求。
上述问题本质上是由于智能驾驶单车数据积累深度与广度不足、强计算能力欠缺、任务自适应能力差、AI 算法优化适配困难。为解决上述问题,完成 AI 在车载终端的深度集成应用,考虑构建车云协同一体的智能驾驶系统。借助云平台灵活、丰富的计算资源,处理复杂的 AI 算法,并将分析结果发给车端进行实时决策规划,使云端域作为具有网络功能开放的大脑和核心,成为连接网络内部和车端业务需求的纽带,借此真正实现网络智能化。基于云计算和大数据技术的发展,把自动驾驶系统分为车、云(平台)两层,提出车云协同自动驾驶系统架构。在云端提供数据存储、数据共享和计算资源,支持深度学习、自主学习、自主维护和个性化适配等复杂 AI 算法。通过部分软/硬件共享技术,可降低车端成本,使计算量减少,有利于车端嵌入式 AI 硬件产品的研发,以满足车规级部件的需求。
2. 基于 AI 的车云协同自动驾驶系统架构及关键技术
围绕 AI 技术应用于自动驾驶中的数据、计算与算法三大要素,面向多车型、多场景与个性化智能驾驶需求,针对智能驾驶单车系统面临的等问题,提出一种基于 AI 的车云协同的自动驾驶系统架构方案,如图 3 所示。
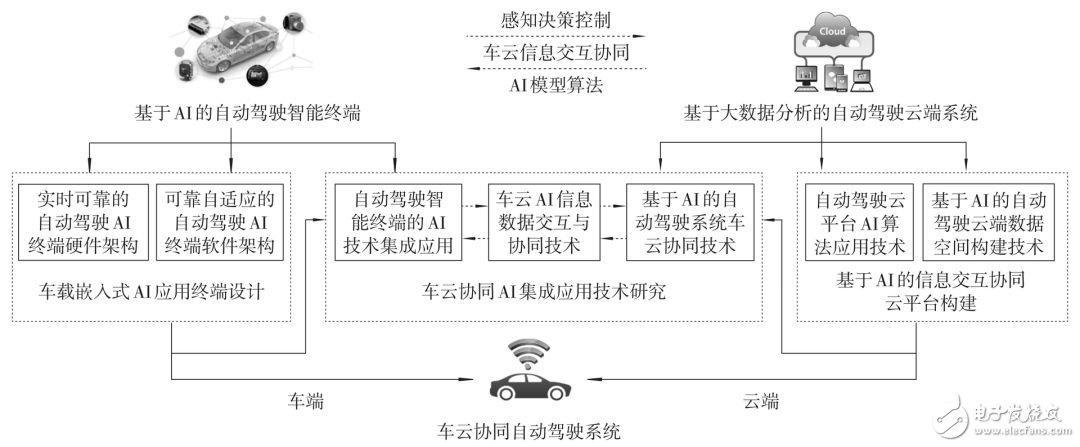
图 3 基于 AI 的车云协同自动驾驶系统架构方案示意图
该架构方案由基于 AI 的自动驾驶智能车端设备和基于大数据分析的自动驾驶云端系统两部分组成,共同形成一个集复杂环境精确感知、通行智慧决策与行车控制优化执行的车云协同一体自动驾驶系统。
2.1 基于 AI 的自动驾驶智能终端
自动驾驶智能终端是一个集环境感知、规划决策、执行控制等多项功能于一体的信息物理融合系统(CPS)[9]。为适应不同场景不同车型汽车自动驾驶的应用需求,需深入研究自动驾驶汽车嵌入式智能控制器软硬件协同设计技术,建立可承载集传感器数据采集、环境感知数据融合、规划决策,执行控制 AI 算法为一体,满足自动驾驶行车需求的智能终端软硬件体系架构,设计实时可靠、具有系统容错和“跛行”能力的自动驾驶汽车 AI 终端,提出实时可靠、任务自适应的智能终端专用系统软件,实现 AI 算法的系统集成验证与实车应用。需突破的关键技术包括实时可靠的自动驾驶 AI 终端硬件架构、可靠自适应的自动驾驶 AI 终端软件架构和自动驾驶智能终端的 AI 技术集成应用等。
1)自动驾驶 AI 终端硬件架构
自动驾驶汽车 AI 终端是一个集环境感知、规划决策、控制执行等多项功能于一体的综合智能系统。根据自动驾驶系统在典型应用场景中针对环境感知、规划决策以及执行控制等业务模块体现出的不同任务分工、工作模式及通信互联方式,研究自动驾驶 AI 终端的系统可靠性设计及模块化设计方法,重点研究基于 GPU 和 MCU 的异构多核硬件系统架构和基于以太网的高速互联通信架构。
2)自动驾驶 AI 终端软件架构
自动驾驶车端系统集成了多个软件功能模块(环境感知、规划决策、执行控制、导航、定位、交通信号监测等)和多个硬件执行单元(计算单元、控制单元、传感器等),研究:
基于 AI 的感知、规划、执行等功能性应用软件系统架构与层次化、模块化的设计方法;
基于任务自适应的系统软件和应用软件最优构架;
确保合理分配和调度包括 GPU、CPU、内存、总线和通信接口等在内的软硬件资源,提供系统自我修复能力、模块资源隔离能力、计算与内存资源分配能力、优先级执行能力,以及模块间有效通信能力等。
3)自动驾驶 AI 终端的技术集成应用
自动驾驶系统作为一个典型的物理信息融合系统,必须通过 AI 方法的综合运用才能实现进行数据信息和知识信息的综合集成。
针对自动驾驶智能终端的有限软硬件资源,构建面向自动驾驶智能终端的 AI 操作系统,使自动驾驶的感知融合、决策控制等任务能够实时执行。
-
FPGA在自动驾驶领域有哪些应用?2024-07-29 8433
-
工业电机行业现状及未来发展趋势分析2025-03-31 575
-
浅析自动驾驶发展趋势,激光雷达是未来?2017-09-06 5562
-
AI/自动驾驶领域的巅峰会议—国际AI自动驾驶高峰论坛2017-09-13 7643
-
2020中国上海国际自动驾驶技术展览会2019-12-08 2944
-
ADAS视觉传感技术,为朝向自动驾驶趋势发展做好准备2020-06-02 2754
-
自动驾驶AI芯片现状分析2020-12-04 2850
-
网联化自动驾驶的含义及发展方向2021-01-12 4985
-
自动驾驶车辆中AI面临的挑战2021-02-22 2722
-
探讨智能视频分析技术的应用现状与发展趋势2021-06-03 3475
-
自动驾驶技术的实现2021-09-03 3288
-
自动驾驶技术未来发展趋势2022-12-14 8804
-
自动驾驶技术的优势及发展趋势2023-06-02 757
-
浅谈自动驾驶技术的现状及发展趋势2024-10-22 5377
-
智能驾驶技术发展趋势2024-10-23 3358
全部0条评论

快来发表一下你的评论吧 !
