

加速度计的高带宽传感器仿真设计
电子说
描述
在高速动力学理论中,速度、力和压力都是基于加速度推导出来的,所以加速度的测量是一个非常关键的步骤。加速度计内的传感元件可用于测量加速度。随着技术进步,需要不断对这类传感器封装进行优化,才能使其胜任带宽更大的振动频率的处理任务。为实现这一目标,研究人员对传感器封装中的新型压阻式传感器芯片进行了测试。他们的仿真结果与实验数据高度吻合,这为高带宽传感器封装的优化和研发铺平了道路。
开发用于加速度计的高带宽传感器
很多行业都离不开加速度计。汽车设计师常常在安全测试中使用这些机电设备分析冲击和振动。消费者电子产品的开发人员将其用于探测数码相机和平板电脑的方向。
汽车安全测试是加速度计的应用之一。
加速度计中嵌入了传感器封装,后者的作用是检测物体加速度的大小和方向。封装元件决定了加速度计能够精确测量的频率带宽。举例来说,现代商业产品的带宽通常为 10~20 kHz。现代技术发展,待测量的频率也随之提高,所以传感器必须能够处理更大的带宽。
认识到这一点后,一组来自弗劳恩霍夫高速动力学研究所(Fraunhofer Institute for High-Speed Dynamics,又称 Ernst-Mach-Institut)的研究团队联手德国弗莱堡大学(Albert-Ludwigs-Universität Freiburg),选择了使用 COMSOL Multiphysics® 软件来设计和分析用于高 G 值加速度计的传感器封装。设计方案的核心是一种新型压阻式传感器芯片,它能够测量高达 100,000 g 的瞬态加速度。相比于目前最先进的传感器,这款压阻式传感器的品质因子(灵敏度乘以共振频率)约高出了一个数量级。
使用 COMSOL Multiphysics® 设计与分析高 G 值加速度计中的传感器封装
首先,我们看一看压阻式传感器芯片的设计,其中包含:
-
刚性框架
-
弯板
-
四个通过惠斯通电桥互连的压阻元件
传感器芯片。图片由 R. Langkemper、R. Külls, J、Wilde, S. Schopferer 和 S. Nau 提供,摘自他们在 COMSOL 用户年会 2016年慕尼黑站发表的论文。
在 COMSOL Multiphysics 中,该芯片配置被完整地建模为硅 MEMS 器件。
至于封装,三块芯片被集成到了一块陶瓷板上。三块芯片互相垂直,分别感应 x、y 和 z 方向。
传感器及其封装相当于一个复杂的质量弹簧系统。板由于加速度而弯曲,引起压阻元件拉伸和压缩,进而导致电阻变化。
完整的传感器封装。图片由 R. Langkemper、R. Külls, J、Wilde, S. Schopferer 和 S. Nau 提供,摘自他们在 COMSOL 用户年会 2016年慕尼黑站发表的论文。
研究人员对多款传感器封装设计进行了测试,不过本文只重点介绍其中的一个具体案例。此传感器封装的几何结构如下所示,研究人员通过 LiveLink™ for Inventor® 将其导入到了 COMSOL Multiphysics® 中。
每种颜色分别表示:
-
白色:封装外壳和盖子
-
红色:陶瓷板
-
灰色:压阻式传感器芯片
-
橙色:材料填充
-
绿色:粘接层
-
蓝色:哑缆

掀开盖子的传感器封装设计示例(a)及其展开图(b)。图片由 R. Langkemper、R. Külls, J、Wilde, S. Schopferer 和 S. Nau 提供,摘自他们在 COMSOL 用户年会 2016年慕尼黑站发表的论文。
为了分析特定频率范围内的传感器性能,研究人员采用了两种方法:
-
对系统进行模态分析
-
在 0~250 kHz 的频率范围内,对被施加振荡加速度负载的传感器进行模拟
第一种方法提供了共振频率的值和振形,而第二种描述了传感器封装中组件的应力和位移。基于这些信息,人们能确定压阻桥的相对电阻,并计算传感器芯片的输出信号。
评估仿真结果
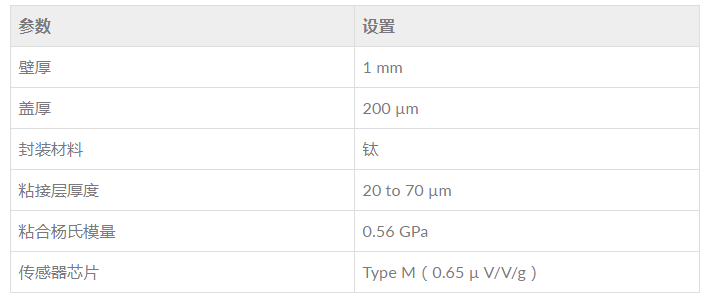
本文的仿真结果基于以下传感器封装的设计参数:

下图显示了 0~250 kHz 频率范围内的传感器输出信号。需要注意的是,这里计算的是 100,000 g 加速度、1 V 电源电压下的输出信号。另外,设传感器灵敏度的最大变幅为 5%。
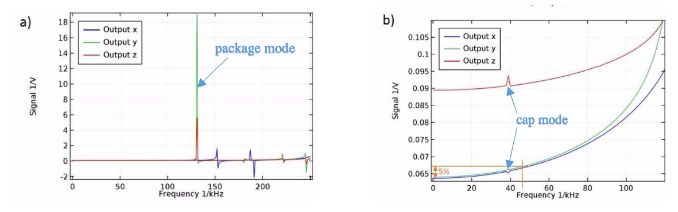
传感器在不同激发频率下的输出信号。左侧图表显示了整个频谱,右侧图表显示了 0~100 kHz 范围内的特写图。图片由 R. Langkemper、R. Külls, J、Wilde, S. Schopferer 和 S. Nau 提供,摘自他们在 COMSOL 用户年会 2016 年慕尼黑站发表的论文。
从左侧图表中可以看出,曲线的变化最初是平坦的,直到 130 kHz 才出现了波动。然而,仔细观察右侧特写图,灵敏度在较低频率下也发生了变化。在灵敏度最大变幅为 5% 的前提下,传感器封装的潜在带宽为 47 kHz。
我们还分析了传感器封装的模式,尤其是频谱中的峰值模式。如上方右图所示,第一个模式,即“盖板模式”发生在频率达到 39 kHz 时,对灵敏度影响很小。在上方左图中,除了上限振荡之外,第一个模式,即“封装模式”出现在频率为 128 kHz 时,它对输出信号产生了显著影响。
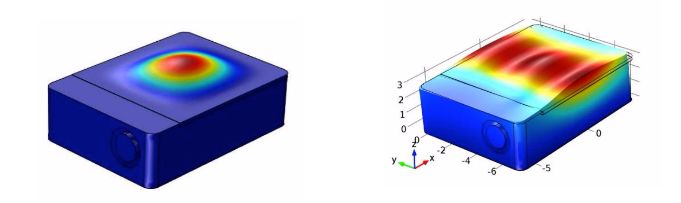
左:第一个盖板模式,沿 z 方向振动。右:第一个封装模式,在 y 方向上振荡。图片由 R. Langkemper、R. Külls, J、Wilde, S. Schopferer 和 S. Nau 提供,摘自他们在 COMSOL 用户年会 2016 年慕尼黑站发表的论文。
根据模态分析,我们在 287 kHz 处观察到另一个振荡。作为传感器元件位移的主要原因,这种模式对传感器信号影响预计最大。为了测试这一假设,研究人员采取了实验测试。
 传感器元件内的主要位移模式。图片由 R. Langkemper、R. Külls, J、Wilde, S. Schopferer 和 S. Nau 提供,摘自他们在 COMSOL 用户年会 2016 年慕尼黑站发表的论文。
传感器元件内的主要位移模式。图片由 R. Langkemper、R. Külls, J、Wilde, S. Schopferer 和 S. Nau 提供,摘自他们在 COMSOL 用户年会 2016 年慕尼黑站发表的论文。
参照实验数据验证结果
在仿真研究转化为实验的阶段中,研究人员使用了下列参数。考虑到实践因素,这些参数与模型采用的参数略有不同。
另一项仿真研究已经预先确定了期望频率的范围:
-
5% 的上下限:16~30 kHz
-
封装的模式:67~98 kHz
-
传感器元件的模式:129~200 kHz
在实验中,研究人员用一个小玻璃锤来刺激传感器,使之产生振荡,以便测量特征频率。他们使用 10 MHz 作为采样频率来记录传感器的脉冲响应。
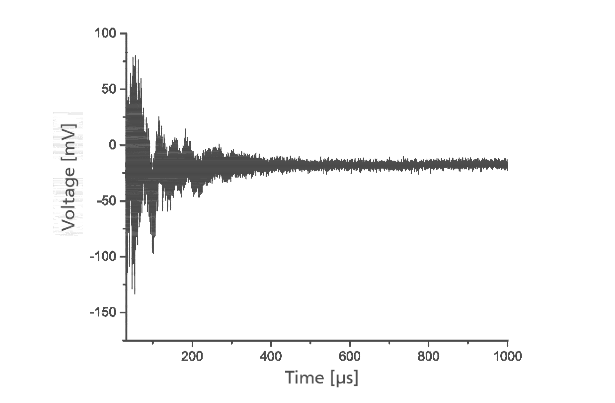
传感器对振荡的脉冲响应。图片由 R. Langkemper、R. Külls, J、Wilde, S. Schopferer 和 S. Nau 提供,摘自他们在 COMSOL 用户年会 2016年慕尼黑站发表的论文。
为了检验相关频率的脉冲响应,信号被转换到了频域。如下图所示,较高的频率段出现了多个峰值。930 kHz 处的最高峰值表示现实中传感器芯片的一阶本征频率。较低的频率约为 70 kHz,属于激发脉冲的一部分。

左:传感器在 0~2 MHz 频率范围内的脉冲响应。右图:传感器在 0~350 kHz 内的脉冲响应。图片由 R. Langkemper、R. Külls, J、Wilde, S. Schopferer 和 S. Nau 提供,摘自他们在 COMSOL 用户年会 2016 年慕尼黑站发表的论文。
有趣的是 153 kHz 对应的峰值。它对应了传感器元件在 129~200 kHz 之间的振荡。这一发现有力支持了振荡对传感元件影响最大的推论。
在灵敏度分析中,每个轴被施加了 8600 g 的加速度。我们利用钛制霍普金森压杆来产生冲击载荷,杆上一个附加装置的功能是保证每个传感器轴上的载荷均匀分布。
霍普金森杆的附加装置。图片由 R. Langkemper、R. Külls, J、Wilde, S. Schopferer 和 S. Nau 提供,摘自他们在 COMSOL 用户年会 2016 年慕尼黑站发表的论文。
下图中的输出信号测量结果被用来计算不同轴的灵敏度。预期灵敏度为 1.3 µ V/V/g,潜在的最大偏差为 30%。灵敏度的最大偏差发生在 x 轴(约 23%)上,而其他轴的偏差率相对较低。请注意,所有传感器芯片的偏差值均落在此范围之内。
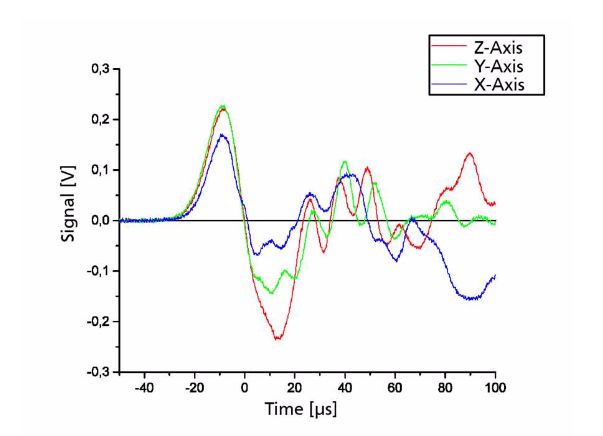 被施加了 8600 g 的加速度下的输出信号测量结果。图片由 R. Langkemper、R. Külls, J、Wilde, S. Schopferer 和 S. Nau 提供,摘自他们在 COMSOL 用户年会 2016 年慕尼黑站发表的论文。
被施加了 8600 g 的加速度下的输出信号测量结果。图片由 R. Langkemper、R. Külls, J、Wilde, S. Schopferer 和 S. Nau 提供,摘自他们在 COMSOL 用户年会 2016 年慕尼黑站发表的论文。
上述研究发现与仿真结果的预期值吻合良好,进一步说明了传感器封装设计适用于高 G 值加速度计。
-
设计具有成本效益的加速度计2022-08-23 1366
-
如何扩展MEMS加速度计的带宽2022-04-21 5549
-
1410L-100加速度计2021-05-28 1194
-
mems加速度计的组成和工作原理2020-07-31 5487
-
MEMS加速度计的概念,MEMS加速度计的原理2020-06-01 5039
-
九轴传感器之加速度计是怎么回事2020-03-24 3509
-
详解状态监控的MEMS加速度计2019-07-17 2502
-
MEMS加速度计性能成熟2018-10-29 2816
-
加速度计的技术规格详解2018-10-18 3267
-
基于ADI的MEMS加速度计关键参数和特性,选出最适合你的MEMS加速度计2017-12-03 14909
-
基础加速度计传感器2017-10-25 1066
-
USB微机电加速度计2017-07-10 3401
-
加速度计和陀螺仪传感器_原理_检测及应用2016-06-17 1345
全部0条评论

快来发表一下你的评论吧 !
