

利用DS18B20做一个温控器(DS18B20引脚图_工作原理及应用电路)
IC应用电路图
描述
DS18B20概述
DS18B20是常用的数字温度传感器,具有体积小,硬件开销低,抗干扰能力强,精度高的特点。DS18B20数字温度传感器接线方便,封装成后可应用于多种场合,如管道式,螺纹式,磁铁吸附式,不锈钢封装式,型号多种多样,有LTM8877,LTM8874等等。
主要根据应用场合的不同而改变其外观。封装后的DS18B20可用于电缆沟测温,高炉水循环测温,锅炉测温,机房测温,农业大棚测温,洁净室测温,弹药库测温等各种非极限温度场合。耐磨耐碰,体积小,使用方便,封装形式多样,适用于各种狭小空间设备数字测温和控制领域。
DS18B20的性能
①独特的单线接口方式,DS18B20在与微处理器连接时仅需要一条口线即可实现微处理器与DS18B20的双向通讯。
②测温范围-55℃~+125℃,固有测温误差(注意,不是分辨率,这里之前是错误的)1℃。
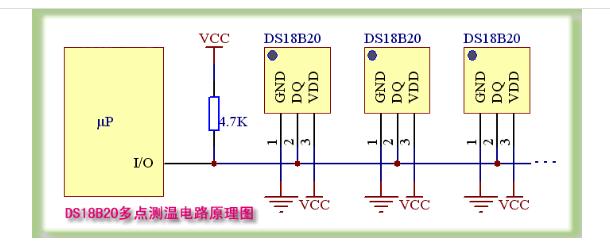
③支持多点组网功能,多个DS18B20可以并联在唯一的三线上,最多只能并联8个,实现多点测温,如果数量过多,会使供电电源电压过低,从而造成信号传输的不稳定。
④工作电源:3.0~5.5V/DC(可以数据线寄生电源)
⑤在使用中不需要任何外围元件
⑥测量结果以9~12位数字量方式串行传送
⑦不锈钢保护管直径Φ6
⑧适用于DN15~25,DN40~DN250各种介质工业管道和狭小空间设备测温
⑨标准安装螺纹M10X1,M12X1.5,G1/2”任选
⑩PVC电缆直接出线或德式球型接线盒出线,便于与其它电器设备连接。
DS18B20引脚图及功能
DS18B20内部结构主要由四部分组成:64位光刻ROM、温度传感器、非挥发的温度报警触发器TH和TL、配置寄存器。

1、GND为电源地
2、DQ为数字信号输入/输出端
3、VDD为外接供电电源输入端(在寄生电源接线方式时接地)。
DS18B20工作原理
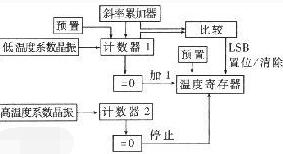
DS18B20的读写时序和测温原理与DS1820相同,只是得到的温度值的位数因分辨率不同而不同,且温度转换时的延时时间由2s减为750ms。DS18B20测温原理如图3所示。图中低温度系数晶振的振荡频率受温度影响很小,用于产生固定频率的脉冲信号送给计数器1。高温度系数晶振随温度变化其振荡率明显改变,所产生的信号作为计数器2的脉冲输入。计数器1和温度寄存器被预置在-55℃所对应的一个基数值。计数器1对低温度系数晶振产生的脉冲信号进行减法计数,当计数器1的预置值减到0时,温度寄存器的值将加1,计数器1的预置将重新被装入,计数器1重新开始对低温度系数晶振产生的脉冲信号进行计数,如此循环直到计数器2计数到0时,停止温度寄存器值的累加,此时温度寄存器中的数值即为所测温度。斜率累加器用于补偿和修正测温过程中的非线性,其输出用于修正计数器1的预置值。
DS18B20应用电路一
DS18B20应用电路 Ds1820_Bus = 0; //产生下降沿,进入写时序(15us内送上数据)
Ds1820_Bus = data_1820&0x01; //从低位开始送数
Delay_X15us(3);//延时45us,保证18b20采样到数据
Ds1820_Bus = 1; //拉高电平完成送数
Delay_X15us(1);//连续送数要间隔至少1us(这里15us)
data_1820》》=1;//移位
DS18B20应用电路二
为了使DS18B20在动态转换周期中获得足够的电流供应,当进行温度转换或拷贝到E2存储器操作时,用MOSFET把I/O线直接拉到VCC就可提供足够的电流,在发出任何涉及到拷贝到E2存储器或启动温度转换的指令后,必须在最多10μS内把I/O线转换到强上拉状态。在强上拉方式下可以解决电流供应不走的问题,因此也适合于多点测温应用,缺点就是要多占用一根I/O口线进行强上拉切换。
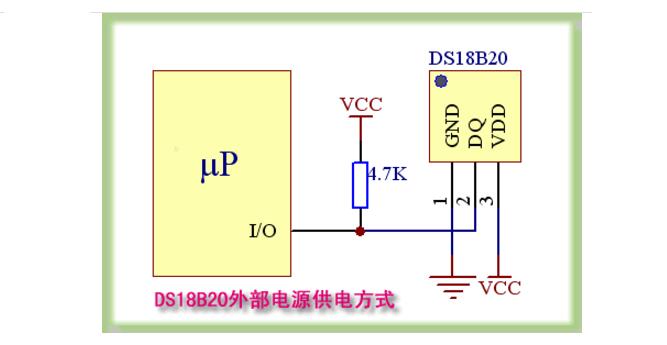
外部电源供电方式是DS18B20最佳的工作方式,工作稳定可靠,抗干扰能力强,而且电路也比较简单,可以开发出稳定可靠的多点温度监控系统。小编推荐大家在开发中使用外部电源供电方式,毕竟比寄生电源方式只多接一根VCC引线。在外接电源方式下,可以充分发挥DS18B20宽电源电压范围的优点,即使电源电压VCC降到3V时,依然能够保证温度量精度。
利用DS18B20做一个温控器
DS18B20是一款常用的温度传感器芯片,它只占用单片机一根IO口,使用起来也特别方便。需要特别注意的是,正因为它只用一根IO口跟单片机通讯,因此读取一次温度值的通讯时间比较长,而且时序要求严格,在通讯期间不允许被单片机其它的中断干扰,因此在实际项目中,系统一旦选用了这款传感器芯片,就千万不要选用动态扫描数码管的显示方式。否则在关闭中断读取温度的时候,数码管的显示会有略微的“闪烁”现象。
DS18B20的测温范围是-55度至125度。在-10度至85度的温度范围内误差是+-0.5度,能满足大部分常用的测温要求。
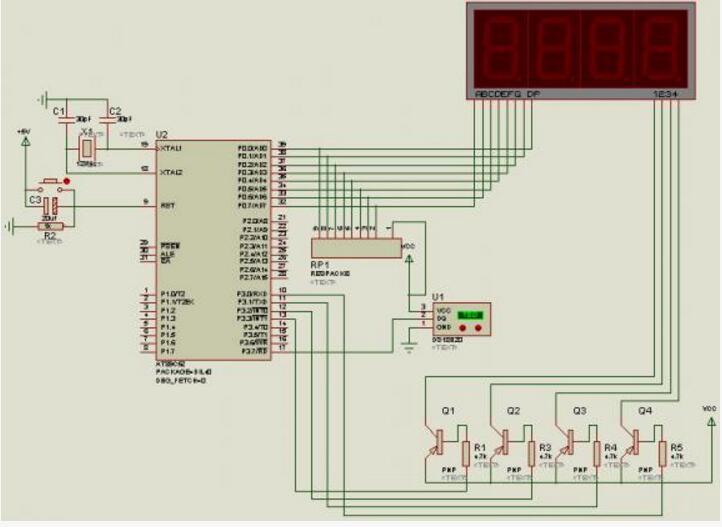
(1)硬件平台
基于朱兆祺51单片机学习板。
(2)实现功能
本程序只有1个窗口。这个窗口有2个局部显示。
第1个局部是第7,6,5位数码管,显示设定的温度。
第2个局部是第4,3,2,1位数码管,显示实际环境温度。其中第4位数码管显示正负符号位。
S1按键是加键,S5按键是减键。通过它们可以直接设置“设定温度”。
一个LED灯用来模拟工控的继电器。
当实际温度低于或者等于设定温度2度以下时,模拟继电器的LED灯亮。
当实际温度等于或者大于设定温度时,模拟继电器的LED灯灭。
当实际温度处于设定温度和设定温度减去2度的范围内,模拟继电器的LED维持现状,这个2度范围用来做缓冲温差,避免继电器在临界温度附近频繁跳动切换。
(3)源代码讲解如下
#include “REG52.H”
#define const_voice_short 40 //蜂鸣器短叫的持续时间
#define const_key_time1 20 //按键去抖动延时的时间
#define const_key_time2 20 //按键去抖动延时的时间
#define const_ds18b20_sampling_time 180 //累计主循环次数的时间,每次刷新采样时钟芯片的时间
void initial_myself(void);
void initial_peripheral(void);
void delay_short(unsigned int uiDelayShort);
void delay_long(unsigned int uiDelaylong);
//驱动数码管的74HC595
void dig_hc595_drive(unsigned char ucDigStatusTemp16_09,unsigned char ucDigStatusTemp08_01);
void display_drive(void); //显示数码管字模的驱动函数
void display_service(void); //显示的窗口菜单服务程序
//驱动LED的74HC595
void hc595_drive(unsigned char ucLedStatusTemp16_09,unsigned char ucLedStatusTemp08_01);
void T0_time(void); //定时中断函数
void key_service(void); //按键服务的应用程序
void key_scan(void);//按键扫描函数 放在定时中断里
void temper_control_service(void); //温控程序
void ds18b20_sampling(void); //ds18b20采样程序
void ds18b20_reset(); //复位ds18b20的时序
unsigned char ds_read_byte(void ); //读一字节
void ds_write_byte(unsigned char dat); //写一个字节
unsigned int get_temper(); //读取一次没有经过换算的温度数值
sbit dq_dr_sr=P2^6; //ds18b20的数据驱动线
sbit key_sr1=P0^0; //对应朱兆祺学习板的S1键
sbit key_sr2=P0^1; //对应朱兆祺学习板的S5键
sbit led_dr=P3^5; //LED灯,模拟工控中的继电器
sbit key_gnd_dr=P0^4; //模拟独立按键的地GND,因此必须一直输出低电平
sbit beep_dr=P2^7; //蜂鸣器的驱动IO口
sbit dig_hc595_sh_dr=P2^0; //数码管的74HC595程序
sbit dig_hc595_st_dr=P2^1;
sbit dig_hc595_ds_dr=P2^2;
sbit hc595_sh_dr=P2^3; //LED灯的74HC595程序
sbit hc595_st_dr=P2^4;
sbit hc595_ds_dr=P2^5;
unsigned int uiSampingCnt=0; //采集Ds1302的计时器,每秒钟更新采集一次
unsigned char ucSignFlag=0; //正负符号。0代表正数,1代表负数,表示零下多少度。
unsigned long ulCurrentTemper=33; //实际温度
unsigned long ulSetTemper=26; //设定温度
unsigned int uiTemperTemp=0; //中间变量
unsigned char ucKeySec=0; //被触发的按键编号
unsigned int uiKeyTimeCnt1=0; //按键去抖动延时计数器
unsigned char ucKeyLock1=0; //按键触发后自锁的变量标志
unsigned int uiKeyTimeCnt2=0; //按键去抖动延时计数器
unsigned char ucKeyLock2=0; //按键触发后自锁的变量标志
unsigned int uiVoiceCnt=0; //蜂鸣器鸣叫的持续时间计数器
unsigned char ucVoiceLock=0; //蜂鸣器鸣叫的原子锁
unsigned char ucDigShow8; //第8位数码管要显示的内容
unsigned char ucDigShow7; //第7位数码管要显示的内容
unsigned char ucDigShow6; //第6位数码管要显示的内容
unsigned char ucDigShow5; //第5位数码管要显示的内容
unsigned char ucDigShow4; //第4位数码管要显示的内容
unsigned char ucDigShow3; //第3位数码管要显示的内容
unsigned char ucDigShow2; //第2位数码管要显示的内容
unsigned char ucDigShow1; //第1位数码管要显示的内容
unsigned char ucDigDot8; //数码管8的小数点是否显示的标志
unsigned char ucDigDot7; //数码管7的小数点是否显示的标志
unsigned char ucDigDot6; //数码管6的小数点是否显示的标志
unsigned char ucDigDot5; //数码管5的小数点是否显示的标志
unsigned char ucDigDot4; //数码管4的小数点是否显示的标志
unsigned char ucDigDot3; //数码管3的小数点是否显示的标志
unsigned char ucDigDot2; //数码管2的小数点是否显示的标志
unsigned char ucDigDot1; //数码管1的小数点是否显示的标志
unsigned char ucDigShowTemp=0; //临时中间变量
unsigned char ucDisplayDriveStep=1; //动态扫描数码管的步骤变量
unsigned char ucWd=1; //因为本程序只有1个窗口,在实际项目中,此处的ucWd也可以省略不要
unsigned char ucWd1Part1Update=1; //在窗口1中,局部1的更新显示标志
unsigned char ucWd1Part2Update=1; //在窗口1中,局部2的更新显示标志
unsigned char ucTemp1=0; //中间过渡变量
unsigned char ucTemp2=0; //中间过渡变量
unsigned char ucTemp3=0; //中间过渡变量
unsigned char ucTemp4=0; //中间过渡变量
unsigned char ucTemp5=0; //中间过渡变量
unsigned char ucTemp6=0; //中间过渡变量
unsigned char ucTemp7=0; //中间过渡变量
unsigned char ucTemp8=0; //中间过渡变量
//根据原理图得出的共阴数码管字模表
code unsigned char dig_table[]=
{
0x3f, //0 序号0
0x06, //1 序号1
0x5b, //2 序号2
0x4f, //3 序号3
0x66, //4 序号4
0x6d, //5 序号5
0x7d, //6 序号6
0x07, //7 序号7
0x7f, //8 序号8
0x6f, //9 序号9
0x00, //无 序号10
0x40, //- 序号11
0x73, //P 序号12
};
void main()
{
initial_myself();
delay_long(100);
initial_peripheral();
while(1)
{
key_service(); //按键服务的应用程序
ds18b20_sampling(); //ds18b20采样程序
temper_control_service(); //温控程序
display_service(); //显示的窗口菜单服务程序
}
}
/* 注释一:
* 做温控设备的时候,为了避免继电器在临界温度附近频繁跳动切换,应该设置一个
* 缓冲温差。本程序的缓冲温差是2度。
*/
void temper_control_service(void) //温控程序
{
if(ucSignFlag==0) //是正数的前提下
{
if(ulCurrentTemper》=ulSetTemper) //当实际温度大于等于设定温度时
{
led_dr=0; //模拟继电器的LED灯熄灭
}
else if(ulCurrentTemper《=(ulSetTemper-2)) //当实际温度小于等于设定温度2读以下时,这里的2是缓冲温差2度
{
led_dr=1; //模拟继电器的LED灯点亮
}
}
else //是负数,说明是零下多少度的情况下
{
led_dr=1; //模拟继电器的LED灯点亮
}
}
void ds18b20_sampling(void) //ds18b20采样程序
{
++uiSampingCnt; //累计主循环次数的时间
if(uiSampingCnt》const_ds18b20_sampling_time) //每隔一段时间就更新采集一次Ds18b20数据
{
uiSampingCnt=0;
ET0=0; //禁止定时中断
uiTemperTemp=get_temper(); //读取一次没有经过换算的温度数值
ET0=1; //开启定时中断
if((uiTemperTemp&0xf800)==0xf800) //是负号
{
ucSignFlag=1;
uiTemperTemp=~uiTemperTemp; //求补码
uiTemperTemp=uiTemperTemp+1;
}
else //是正号
{
ucSignFlag=0;
}
ulCurrentTemper=0; //把int数据类型赋给long类型之前要先清零
ulCurrentTemper=uiTemperTemp;
ulCurrentTemper=ulCurrentTemper*10; //为了先保留一位小数点,所以放大10倍,
ulCurrentTemper=ulCurrentTemper》》4; //往右边移动4位,相当于乘以0.0625. 此时保留了1位小数点,
ulCurrentTemper=ulCurrentTemper+5; //四舍五入
ulCurrentTemper=ulCurrentTemper/10; //四舍五入后,去掉小数点
ucWd1Part2Update=1; //局部2更新显示实时温度
}
}
//ds18b20驱动程序
unsigned int get_temper() //读取一次没有经过换算的温度数值
{
unsigned char temper_H;
unsigned char temper_L;
unsigned int ds18b20_data=0;
ds18b20_reset(); //复位ds18b20的时序
ds_write_byte(0xCC);
ds_write_byte(0x44);
ds18b20_reset(); //复位ds18b20的时序
ds_write_byte(0xCC);
ds_write_byte(0xBE);
temper_L=ds_read_byte();
temper_H=ds_read_byte();
ds18b20_data=temper_H; //把两个字节合并成一个int数据类型
ds18b20_data=ds18b20_data《《8;
ds18b20_data=ds18b20_data|temper_L;
return ds18b20_data;
}
void ds18b20_reset() //复位ds18b20的时序
{
unsigned char x;
dq_dr_sr=1;
delay_short(8);
dq_dr_sr=0;
delay_short(80);
dq_dr_sr=1;
delay_short(14);
x=dq_dr_sr;
delay_short(20);
}
void ds_write_byte(unsigned char date) //写一个字节
{
unsigned char i;
for(i=0;i《8;i++)
{
dq_dr_sr=0;
dq_dr_sr=date&0x01;
delay_short(5);
dq_dr_sr=1;
date=date》》1;
}
}
unsigned char ds_read_byte(void ) //读一字节
{
unsigned char i;
unsigned char date=0;
for(i=0;i《8;i++)
{
dq_dr_sr=0;
date=date》》1;
dq_dr_sr=1;
if(dq_dr_sr)
{
date=date|0x80;
}
delay_short(5);
}
return (date);
}
void display_service(void) //显示的窗口菜单服务程序
{
switch(ucWd) //因为本程序只有1个窗口,在实际项目中,此处的ucWd也可以省略不要
{
case 1:
if(ucWd1Part1Update==1)//局部设定温度更新显示
{
ucWd1Part1Update=0;
ucTemp8=10; //显示空
if(ulSetTemper》=100)
{
ucTemp7=ulSetTemper%1000/100; //显示设定温度的百位
}
else
{
ucTemp7=10; //显示空
}
if(ulSetTemper》=10)
{
ucTemp6=ulSetTemper%100/10; //显示设定温度的十位
}
else
{
ucTemp6=10; //显示空
}
ucTemp5=ulSetTemper%10; //显示设定温度的个位
ucDigShow8=ucTemp8; //数码管显示实际内容
ucDigShow7=ucTemp7;
ucDigShow6=ucTemp6;
ucDigShow5=ucTemp5;
}
if(ucWd1Part2Update==1)//局部实际温度更新显示
{
if(ucSignFlag==0) //正数
{
ucTemp4=10; //显示空
}
else //负数,说明是零下多少度的情况下
{
ucTemp4=11; //显示负号-
}
if(ulCurrentTemper》=100)
{
ucTemp3=ulCurrentTemper%100/100; //显示实际温度的百位
}
else
{
ucTemp3=10; //显示空
}
if(ulCurrentTemper》=10)
{
ucTemp2=ulCurrentTemper%100/10; //显示实际温度的十位
}
else
{
ucTemp2=10; //显示空
}
ucTemp1=ulCurrentTemper%10; //显示实际温度的个数位
ucDigShow4=ucTemp4; //数码管显示实际内容
ucDigShow3=ucTemp3;
ucDigShow2=ucTemp2;
ucDigShow1=ucTemp1;
}
break;
}
}
void key_scan(void)//按键扫描函数 放在定时中断里
{
if(key_sr1==1)//IO是高电平,说明按键没有被按下,这时要及时清零一些标志位
{
ucKeyLock1=0; //按键自锁标志清零
uiKeyTimeCnt1=0;//按键去抖动延时计数器清零,此行非常巧妙,是我实战中摸索出来的。
}
else if(ucKeyLock1==0)//有按键按下,且是第一次被按下
{
uiKeyTimeCnt1++; //累加定时中断次数
if(uiKeyTimeCnt1》const_key_time1)
{
uiKeyTimeCnt1=0;
ucKeyLock1=1; //自锁按键置位,避免一直触发
ucKeySec=1; //触发1号键
}
}
if(key_sr2==1)//IO是高电平,说明按键没有被按下,这时要及时清零一些标志位
{
ucKeyLock2=0; //按键自锁标志清零
uiKeyTimeCnt2=0;//按键去抖动延时计数器清零,此行非常巧妙,是我实战中摸索出来的。
}
else if(ucKeyLock2==0)//有按键按下,且是第一次被按下
{
uiKeyTimeCnt2++; //累加定时中断次数
if(uiKeyTimeCnt2》const_key_time2)
{
uiKeyTimeCnt2=0;
ucKeyLock2=1; //自锁按键置位,避免一直触发
ucKeySec=2; //触发2号键
}
}
}
void key_service(void) //按键服务的应用程序
{
switch(ucKeySec) //按键服务状态切换
{
case 1:// 加按键 对应朱兆祺学习板的S1键
switch(ucWd) //因为本程序只有1个窗口,在实际项目中,此处的ucWd也可以省略不要
{
case 1: //在窗口1下设置设定温度
ulSetTemper++;
if(ulSetTemper》125)
{
ulSetTemper=125;
}
ucWd1Part1Update=1; //更新显示设定温度
break;
}
ucVoiceLock=1; //原子锁加锁,保护主函数与中断函数的共享变量uiVoiceCnt
uiVoiceCnt=const_voice_short; //按键声音触发,滴一声就停。
ucVoiceLock=0; //原子锁解锁,保护主函数与中断函数的共享变量uiVoiceCnt
ucKeySec=0; //响应按键服务处理程序后,按键编号清零,避免一致触发
break;
case 2:// 减按键 对应朱兆祺学习板的S5键
switch(ucWd) //因为本程序只有1个窗口,在实际项目中,此处的ucWd也可以省略不要
{
case 1: //在窗口1下设置设定温度
if(ulSetTemper》2) //由于缓冲温差是2度,所以我人为规定最小允许设定的温度不能低于2度
{
ulSetTemper--;
}
ucWd1Part1Update=1; //更新显示设定温度
break;
}
ucVoiceLock=1; //原子锁加锁,保护主函数与中断函数的共享变量uiVoiceCnt
uiVoiceCnt=const_voice_short; //按键声音触发,滴一声就停。
ucVoiceLock=0; //原子锁解锁,保护主函数与中断函数的共享变量uiVoiceCnt
ucKeySec=0; //响应按键服务处理程序后,按键编号清零,避免一致触发
break;
}
}
void display_drive(void)
{
//以下程序,如果加一些数组和移位的元素,还可以压缩容量。但是鸿哥追求的不是容量,而是清晰的讲解思路
switch(ucDisplayDriveStep)
{
case 1: //显示第1位
ucDigShowTemp=dig_table[ucDigShow1];
if(ucDigDot1==1)
{
ucDigShowTemp=ucDigShowTemp|0x80; //显示小数点
}
dig_hc595_drive(ucDigShowTemp,0xfe);
break;
case 2: //显示第2位
ucDigShowTemp=dig_table[ucDigShow2];
if(ucDigDot2==1)
{
ucDigShowTemp=ucDigShowTemp|0x80; //显示小数点
}
dig_hc595_drive(ucDigShowTemp,0xfd);
break;
case 3: //显示第3位
ucDigShowTemp=dig_table[ucDigShow3];
if(ucDigDot3==1)
{
ucDigShowTemp=ucDigShowTemp|0x80; //显示小数点
}
dig_hc595_drive(ucDigShowTemp,0xfb);
break;
case 4: //显示第4位
ucDigShowTemp=dig_table[ucDigShow4];
if(ucDigDot4==1)
{
ucDigShowTemp=ucDigShowTemp|0x80; //显示小数点
}
dig_hc595_drive(ucDigShowTemp,0xf7);
break;
case 5: //显示第5位
ucDigShowTemp=dig_table[ucDigShow5];
if(ucDigDot5==1)
{
ucDigShowTemp=ucDigShowTemp|0x80; //显示小数点
}
dig_hc595_drive(ucDigShowTemp,0xef);
break;
case 6: //显示第6位
ucDigShowTemp=dig_table[ucDigShow6];
if(ucDigDot6==1)
{
ucDigShowTemp=ucDigShowTemp|0x80; //显示小数点
}
dig_hc595_drive(ucDigShowTemp,0xdf);
break;
case 7: //显示第7位
ucDigShowTemp=dig_table[ucDigShow7];
if(ucDigDot7==1)
{
ucDigShowTemp=ucDigShowTemp|0x80; //显示小数点
}
dig_hc595_drive(ucDigShowTemp,0xbf);
break;
case 8: //显示第8位
ucDigShowTemp=dig_table[ucDigShow8];
if(ucDigDot8==1)
{
ucDigShowTemp=ucDigShowTemp|0x80; //显示小数点
}
dig_hc595_drive(ucDigShowTemp,0x7f);
break;
}
ucDisplayDriveStep++;
if(ucDisplayDriveStep》8) //扫描完8个数码管后,重新从第一个开始扫描
{
ucDisplayDriveStep=1;
}
}
//数码管的74HC595驱动函数
void dig_hc595_drive(unsigned char ucDigStatusTemp16_09,unsigned char ucDigStatusTemp08_01)
{
unsigned char i;
unsigned char ucTempData;
dig_hc595_sh_dr=0;
dig_hc595_st_dr=0;
ucTempData=ucDigStatusTemp16_09; //先送高8位
for(i=0;i《8;i++)
{
if(ucTempData》=0x80)dig_hc595_ds_dr=1;
else dig_hc595_ds_dr=0;
dig_hc595_sh_dr=0; //SH引脚的上升沿把数据送入寄存器
delay_short(1);
dig_hc595_sh_dr=1;
delay_short(1);
ucTempData=ucTempData《《1;
}
ucTempData=ucDigStatusTemp08_01; //再先送低8位
for(i=0;i《8;i++)
{
if(ucTempData》=0x80)dig_hc595_ds_dr=1;
else dig_hc595_ds_dr=0;
dig_hc595_sh_dr=0; //SH引脚的上升沿把数据送入寄存器
delay_short(1);
dig_hc595_sh_dr=1;
delay_short(1);
ucTempData=ucTempData《《1;
}
dig_hc595_st_dr=0; //ST引脚把两个寄存器的数据更新输出到74HC595的输出引脚上并且锁存起来
delay_short(1);
dig_hc595_st_dr=1;
delay_short(1);
dig_hc595_sh_dr=0; //拉低,抗干扰就增强
dig_hc595_st_dr=0;
dig_hc595_ds_dr=0;
}
//LED灯的74HC595驱动函数
void hc595_drive(unsigned char ucLedStatusTemp16_09,unsigned char ucLedStatusTemp08_01)
{
unsigned char i;
unsigned char ucTempData;
hc595_sh_dr=0;
hc595_st_dr=0;
ucTempData=ucLedStatusTemp16_09; //先送高8位
for(i=0;i《8;i++)
{
if(ucTempData》=0x80)hc595_ds_dr=1;
else hc595_ds_dr=0;
hc595_sh_dr=0; //SH引脚的上升沿把数据送入寄存器
delay_short(1);
hc595_sh_dr=1;
delay_short(1);
ucTempData=ucTempData《《1;
}
ucTempData=ucLedStatusTemp08_01; //再先送低8位
for(i=0;i《8;i++)
{
if(ucTempData》=0x80)hc595_ds_dr=1;
else hc595_ds_dr=0;
hc595_sh_dr=0; //SH引脚的上升沿把数据送入寄存器
delay_short(1);
hc595_sh_dr=1;
delay_short(1);
ucTempData=ucTempData《《1;
}
hc595_st_dr=0; //ST引脚把两个寄存器的数据更新输出到74HC595的输出引脚上并且锁存起来
delay_short(1);
hc595_st_dr=1;
delay_short(1);
hc595_sh_dr=0; //拉低,抗干扰就增强
hc595_st_dr=0;
hc595_ds_dr=0;
}
void T0_time(void) interrupt 1 //定时中断
{
TF0=0; //清除中断标志
TR0=0; //关中断
if(ucVoiceLock==0) //原子锁判断
{
if(uiVoiceCnt!=0)
{
uiVoiceCnt--; //每次进入定时中断都自减1,直到等于零为止。才停止鸣叫
beep_dr=0; //蜂鸣器是PNP三极管控制,低电平就开始鸣叫。
}
else
{
; //此处多加一个空指令,想维持跟if括号语句的数量对称,都是两条指令。不加也可以。
beep_dr=1; //蜂鸣器是PNP三极管控制,高电平就停止鸣叫。
}
}
key_scan(); //按键扫描函数
display_drive(); //数码管字模的驱动函数
TH0=0xfe; //重装初始值(65535-500)=65035=0xfe0b
TL0=0x0b;
TR0=1; //开中断
}
void delay_short(unsigned int uiDelayShort)
{
unsigned int i;
for(i=0;i《uiDelayShort;i++)
{
; //一个分号相当于执行一条空语句
}
}
void delay_long(unsigned int uiDelayLong)
{
unsigned int i;
unsigned int j;
for(i=0;i《uiDelayLong;i++)
{
for(j=0;j《500;j++) //内嵌循环的空指令数量
{
; //一个分号相当于执行一条空语句
}
}
}
void initial_myself(void) //第一区 初始化单片机
{
led_dr=0;//此处的LED灯模拟工控中的继电器
key_gnd_dr=0; //模拟独立按键的地GND,因此必须一直输出低电平
beep_dr=1; //用PNP三极管控制蜂鸣器,输出高电平时不叫。
hc595_drive(0x00,0x00); //关闭所有经过另外两个74HC595驱动的LED灯
TMOD=0x01; //设置定时器0为工作方式1
TH0=0xfe; //重装初始值(65535-500)=65035=0xfe0b
TL0=0x0b;
}
void initial_peripheral(void) //第二区 初始化外围
{
ucDigDot8=0; //小数点全部不显示
ucDigDot7=0;
ucDigDot6=0;
ucDigDot5=0;
ucDigDot4=0;
ucDigDot3=0;
ucDigDot2=0;
ucDigDot1=0;
EA=1; //开总中断
ET0=1; //允许定时中断
TR0=1; //启动定时中断
}
-
 a1332151759
2018-12-15
0 回复 举报某宝链接,提供技术支持 收起回复
a1332151759
2018-12-15
0 回复 举报某宝链接,提供技术支持 收起回复
-
DS18B20温度传感器工作原理及其应用电路图2012-02-21 32570
-
DS18B20简介2021-11-22 2993
-
DS18B20的相关资料分享2022-01-10 946
-
ds18b20电路图2010-03-03 6113
-
ds18b20引脚图管脚图及内部结构2008-01-09 26286
-
数字温度传感器DS18B20的设计及应用2010-04-02 3555
-
由DS18B20构成的电脑温控系统2010-11-30 1097
-
DS18B20原理图2016-05-11 2180
-
DS18B202016-05-24 1437
-
DS18B20实例2016-06-02 1677
-
ds18b202017-01-14 1318
-
ds18b20测温电路图详解2017-11-07 94436
-
ds18b20的特性_ds18b20温度传感器应用2020-04-24 12576
-
DS18B20 DS18B20 - (Maxim Integrated) - 温度传感器 - 模拟和数字输出2022-11-02 433
-
DS18B20温度传感器的工作原理和硬件设计2024-10-24 17161
全部0条评论

快来发表一下你的评论吧 !
