

基于双向DC/DC变换器的建模与控制说明
电子说
描述
1、引言
双向DC-DC变换器(Bi-directionalDC-DCConverter,BDC)是DC-DC变换器的双象限运行,它的输入、输出电压极性不变,输入、输出电流的方向可以改变。BDC实现了能量的双向传输,在功能上相当于两个单向DC-DC变换器,是典型的“一机两用”设备。在需要双向能量流动的应用场合可以大幅度减轻系统的体积重量及成本,有重要研究价值。
电力电子变换器控制模型的深入研究,有助于变换器的优化设计,改善变换器性能。文献[5-7]对变换器的控制模型进行了研究,取得了好的效果。DC-DC变换器为实现稳压输出、优良的动态性能等,需构成闭环反馈控制系统。状态空间平均法是分析开关调节系统的常用方法[8]。单向DC-DC变换器有成熟的控制技术,但在BDC中不同功率流向控制模型不同,因此研究BDC的控制模型,提出有效的控制方案是研究BDC的重要方面。本文以Buck/Boost双端分时稳压BDC为例,分析BDC的控制模型问题。
2、BDC的控制模型及PID调节器
2.1应用实例
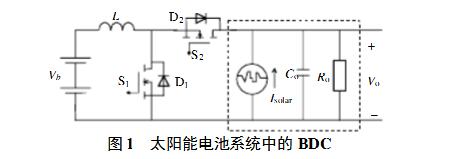
图1为太阳能电池阵系统应用实例[9]。在该系统中,Vb代表蓄电池,Isolar代表太阳能电池。日照区时,太阳能电池提供负载能量,同时多余的能量通过BDC给蓄电池充电;日影区时,蓄电池通过BDC给负载提供能量。系统工作时维持调节点电压Vo不变。在该系统中虚线框内的变换器等效负载在日影区期间表现为耗散型的电阻,而在日照区期间为供电电源,因此其控制模型和常规变换器不同。Buck/BoostBDC从控制的角度可以分为Buck型BDC、Boost型BDC和双端分时稳压Buck/BoostBDC三种情况。
2.2Buck型BDC的控制模型
图2为Buck型BDC的等效电路。Req为等效负载,既代表耗散型的负载,也代表可提供功率的电源。

设图2中S2的占空比为D:

设系统参数为:Vi=30~60V,Vo=24V,R=2.4 Ω,L=160μH,C=2000μF。当Req为耗散型电阻时,图2电路为常规的Buck型变换器。若无补偿环节时,其控制到输出的开环传递函数Bode图如图3(a)虚线所示。能量由Vo流向Vi时,Req相当于负电阻。此时由控制到输出的传递函数(无补偿环节)中Req= −2.4Ω,系统开环传递函数出现两个右半平面极点,图3(a)实线为其对应Bode图。两种情况下的幅频特性曲线相同,而相频特性曲线对称于0°线。对于常规Buck变换器,通过比例(P)、比例积分(PI)、比例积分微分(PID)等补偿环节校正均可使系统具有一定的幅值和相角裕度。但负阻抗型负载的Buck变换器具有两个右半平面极点,其相频特性曲线在谐振频率之后趋近于180°线,经P或PI环节的补偿不能使闭环系统稳定。
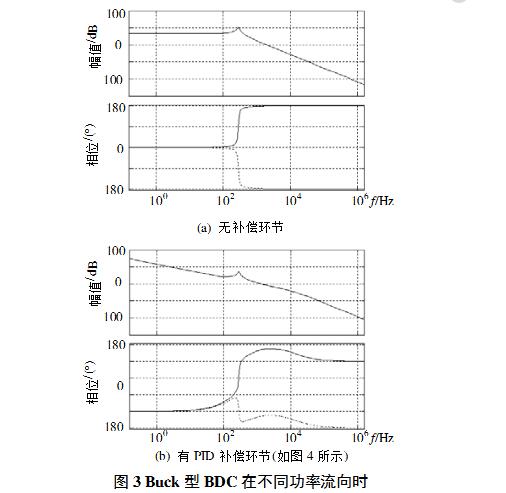
由Nyquist稳定判据,系统正穿越π/2线一次可以实现具有两个右半平面极点的系统稳定。微分(D)环节可以对系统有π/4的相位补偿,因此采用PID补偿环节有可能实现该BDC系统的闭环稳定。本节采用图4所示的PID补偿环节,通过合理设计PID参数(R1=10kΩ,C1=47nF,R2=30kΩ,C2=33nF,R3=220Ω),可以得到如图3(b)所示的由控制到输出的Bode图(虚线对应耗散型负载情况,实线对应源性负载情况)。两种负载情况下开环截止频率都为1.28kHz。耗散型负载下系统相位裕度为64°,源性负载时系统相位裕度为51°。系统具有好的稳定性。
2.3Boost型BDC的控制模型
在图2所示电路Vi侧稳压时,为Boost型BDC。设图2中S2的占空比为D。
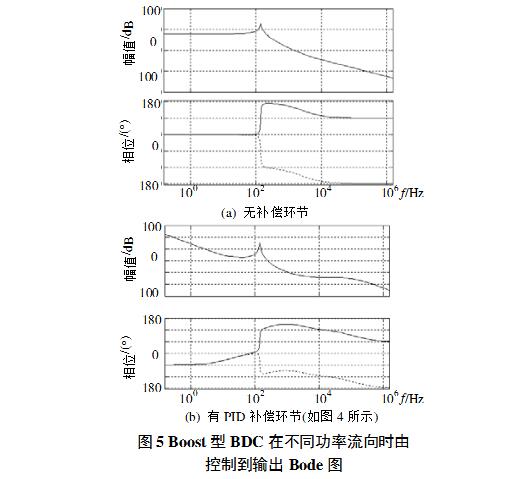
系统功率级有一个右半平面零点,图5(a)为Boost型BDC的Bode图(虚线对应耗散型负载情况,实线对应源性负载情况)。系统参数为:Vo= 20~30V,Vi=48V,R=10Ω,L=160μH,C=2000μF。由图可见,只有通过微分(D)环节补偿才能使系统稳定(单闭环)。仍采用图4所示的PID补偿环节(参数为:R1=10kΩ,C1=47nF,R2=50kΩ,C2=20nF,R3=33Ω),图5(b)为PID环节补偿后由控制到输出Bode图(虚线对应耗散型负载情况,实线对应源性负载情况)。经PID环节补偿后系统稳定,系统开环截止频率为1.15kHz,两种情况相位裕度都是47°,系统具有好的稳定性。
2.4Buck/Boost双端分时稳压BDC的控制模型
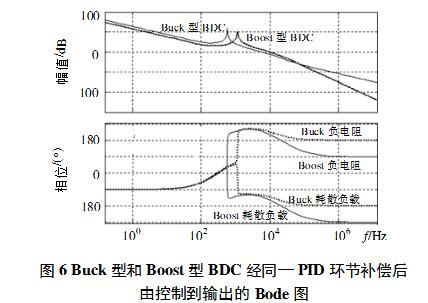
在双端分时稳压情况下,要求设计的PID调节器能对两个方向的BDC进行稳定调节。由上面两种类型的BDC的控制模型分析可知,采用同一个PID调节器,可以实现Buck型BDC和Boost型BDC闭环稳定工作。对于本节分析的双端分时稳压的BDC系统,采用同样的PID环节(参数为:R1=10kΩ,
C1=47nF,R2=20kΩ,C2=33nF,R3=270Ω)补偿后的系统Bode见图6,图中虚线为Buck型BDC的情况(相频特性曲线中上面两条为源性负载情况,下面的两条为耗散性负载情况),实线为Boost型BDC的情况。Buck型BDC由控制到输出的开环截止频率为
10.2kHz,耗散负载和源性负载情况下的相角裕量都为48°;Boost型BDC由控制到输出的开环截止频率为5.99kHz,耗散负载和源性负载情况下的相角裕量均为50°,幅值裕量均为15.3dB。
3、试验验证
3.1控制电路
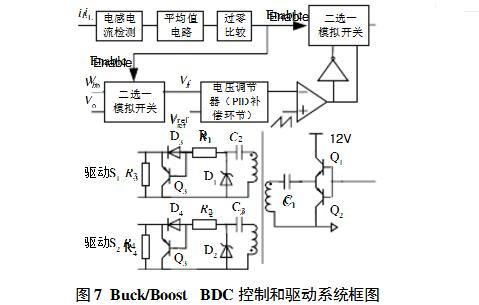
本文研究的BDC样机的规格要求为:① 根据功率流向自动选择稳压输出端;② 低压侧:15~30V(额定24V),高压侧电压:30~60V(额定48V);③ 输出功率300W。要求根据功率流的方向确定输出电压的稳压侧,即:能量由Vo流向Vb(参考图1)时,Vb侧稳压输出,控制模型为式(1);能量由Vb流向Vo时,Vo侧稳压输出,控制模型为式(2)。两种情况的负载都是耗散型电阻。设计控制电路框图如图7所示。
该控制电路利用一个电压调节器和一套驱动电路实现了Buck/Boost BDC两端稳压,并可根据能量流动的方向,自动选择稳压端(Vo或Vb)。
3.2试验验证
采用电感电流过零的方案[1]和上面分析的PID控制器参数,构造试验样机。
(1)系统稳定性试验
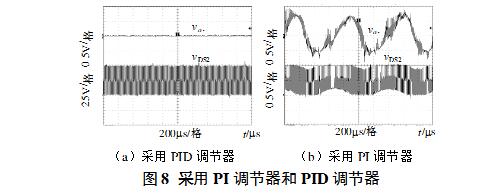
图8(a)为样机在PID调节器下的Boost侧(48V)的输出电压波形(耦合交流)。图8(b)为采用PI调节器获得同样的开环截止频率时的48V侧输出电压波形(耦合交流),输出电压出现了振荡。说明单闭环PID调节器实现双向闭环稳定的分析正确。
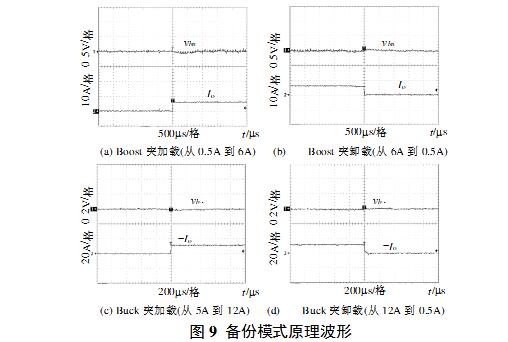
(2)系统动态性能 图9 (a)、(b)为Boost侧48V稳压输出时的突加载(从0.5A到6A)和突卸载(从6A到0.5A)试验波形。(c)、(d)为Buck侧(24V)稳压输出时的突加载(从0.5A到12A)和突卸载(从12A到0.5A)试验波形。48V侧响应速度为1.75ms,24V侧的响应速度为0.6ms,系统有快速的瞬态响应特性。
4、结论
双向DC-DC变换器在不同的功率流向时,存在不同的控制模型,其电压调节器需要考虑两个能量流动方向的因素。本文以Buck/Boost双向DC-DC变换器为例构建试验平台,通过双向控制模型的分析,认为单闭环调节器应采取PID或其它的有π/2相位补偿的调节器。试验系统的稳定和良好动态性能说明本文分析正确。
-
双向DC DC变换器高效控制模型matlab Simulin2023-05-04 702
-
双向直流变换器,严仰光,双向DC-DC变换器的经典课本!2021-09-27 5222
-
双向全桥DC_DC变换器新型控制策略研究2021-08-31 1541
-
基于STM32的双向DC-DC变换器设计2021-08-04 3553
-
电动汽车双向DC/DC变换器的研究2021-04-16 1752
-
双向dc-dc变换器是什么 双向dcdc变换器原理2018-08-20 106608
-
基于UCD3138的双向DC-DC变换器控制部分2018-08-08 7939
-
双向DC-DC变换器的优化控制方法2018-01-05 1484
-
软开关双向DC-DC变换器的研究2016-11-05 1416
-
PWM加相移控制双向DC DC变换器的综合2016-05-10 1009
-
双向DC/DC变换器电路2012-05-02 51417
-
基于HEV双向DC DC变换器的研究与设计2010-02-24 1021
-
相移复合控制双向DC/DC变换器的优化设计2009-10-16 1079
全部0条评论

快来发表一下你的评论吧 !
