

LT1796хЕ╖ш┐ЗхОЛцХЕщЪЬф┐ЭцКдхКЯшГ╜чЪДCANцФ╢хПСхЩицКАцЬпцЙЛхЖМ
цППш┐░
цжВш┐░
LT1796 CAN цФ╢хПСхЩихЕ╖цЬЙхЖЕч╜охо╣щФЩшГ╜хКЫя╝МхПпхоЙхЕишАРхПЧх╖еф╕ЪхТМц▒╜ш╜жчОпхвГуАВ ф╕НщЬАшжБф╜┐чФихИЖчлЛчЪДф┐ЭцКдхЩиф╗╢уАВ цА╗ч║┐цОехПгх╝ХшДЪшГ╜хдЯцЙ┐хПЧщлШш╛╛ ┬▒60V (чЫ╕хп╣ф║ОхЬ░чФ╡ф╜Н) чЪДчФ╡хОЛцХЕщЪЬя╝МшАМф╕Нф╝ЪцНЯхЭПхЩиф╗╢уАВ цХЕщЪЬцЬЙхПпшГ╜хЬицФ╢хПСхЩихдДф║Ош┐РшбМуАБхБЬцЬ║цИЦцЦнчФ╡чК╢цАБцЧ╢хПСчФЯуАВ чЙЗхЖЕ ESD ф┐ЭцКдхКЯшГ╜чФ╡ш╖пхПпцЙ┐хПЧщлШш╛╛ ┬▒15kV чЪДчй║ц░ФцФ╛чФ╡хТМ ┬▒8kV чЪДцОешзжцибх╝ПцФ╛чФ╡ц╡ЛшпХя╝МхоМхЕичмжхРИ IEC-1000-4-2 шзДца╝шжБц▒ВуАВ чФ╡ц║РцИЦцОехЬ░ш┐ЮцОечЪДф╕вхд▒х╣╢ф╕Нф╝ЪцНЯхЭП ICуАВ
чФ╡ш╖пхПпхЬищлШш╛╛ 125kbaud чЪДцХ░цНощАЯчОЗф╕Лш┐Рф╜ЬуАВ ф╕Аф╕кш╜мцНвщАЯчОЗцОзхИ╢х╝ХшДЪхПпцОзхИ╢хПСщАБцХ░цНошДЙхЖ▓ш╛╣ц▓┐я╝Мф╗ОшАМхп╣ф╕Нх╜Уч╗ИцОеч║┐ш╖пф╕КчЪД EMI хТМхПНх░ДщЧощвШхКаф╗ецКСхИ╢уАВ щлШш╛УхЗ║чФ╡ц╡Бщй▒хКихЕБшо╕ф╜┐чФищШ╗цКЧф╜ОшЗ│ 72╬й чЪДх╗Йф╗╖ PVC чФ╡ч╝ЖуАВ 100k╬й ш╛УхЕещШ╗цКЧхПпф╜┐цпПф╕кцХ░цНоч╜Сч╗ЬцФпцМБхдЪш╛╛ 256 ф╕кцФ╢хПСхЩиуАВ
LT1796 щЗЗчФи 8 х╝ХшДЪ PDIP хТМ SO х░БшгЕуАВ
цХ░цНошбия╝Ъ*щЩДф╗╢я╝ЪLT1796хЕ╖ш┐ЗхОЛцХЕщЪЬф┐ЭцКдхКЯшГ╜чЪДCANцФ╢хПСхЩицКАцЬпцЙЛхЖМ.pdf
х║ФчФи
- х╖еф╕ЪцОзхИ╢цХ░цНоч╜Сч╗Ь
- ц▒╜ш╜жч│╗ч╗Я
- HVAC цОзхИ╢
чЙ╣цАз
- цПРф╛Ыф║ЖшЗ│ ┬▒60V чЪДш┐ЗхОЛч║┐ш╖пцХЕщЪЬф┐ЭцКд
- ESD ф┐ЭцКдшЗ│ IEC-1000-4-2 Level 4
- ┬▒15kV чй║ц░ФщЧ┤щЪЩц╡ЛшпХ
- ┬▒8kV цОешзжцибх╝Пц╡ЛшпХ
- хПпхЕ╝хо╣ ISO 11898 цаЗхЗЖ
- щлШш╛УхЕещШ╗цКЧцФпцМБхдЪш╛╛ 256 ф╕кшКВчВ╣
- чФиф║О EMI ш╛Рх░ДцОзхИ╢чЪДхПЧцОзш╜мцНвщАЯчОЗ
- х╜УшвлхЕ│цЦнцИЦцЦнчФ╡цЧ╢я╝Мш╛УхЗ║хСИщлШщШ╗цКЧчК╢цАБ
- хЬицЙАцЬЙчЪДш╛УхЗ║члпф╕КхЭЗцПРф╛Ыф║ЖчЯнш╖пф┐ЭцКд
- чГнхБЬцЬ║ф┐ЭцКд
- х╝ХшДЪф╕О Philips PCA82C251 чЫ╕хЕ╝хо╣
хЕ╕хЮЛх║ФчФи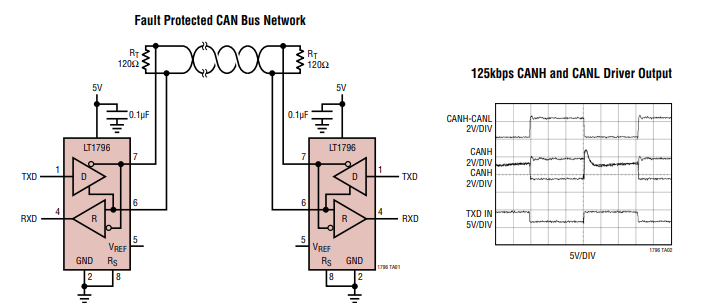
х╝ХшДЪщЕНч╜оцППш┐░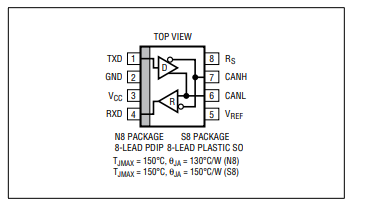
х╝ХшДЪхКЯшГ╜
- TXDя╝Их╝ХшДЪ1я╝Йя╝Ъщй▒хКихЩиш╛УхЕе я╝ЪщА╗ш╛СчФ╡х╣│щШИхА╝чФ▒VREFшо╛хоЪуАВщА╗ш╛Сш╛УхЕечФ╡х╣│щлШф║ОVREFцЧ╢я╝Мщй▒хКихЩиш╛УхЗ║хЕ│щЧня╝МщЗКцФ╛хп╣CANHхТМCANLч║┐ш╖пчЪДцОзхИ╢уАВщА╗ш╛Сш╛УхЕечФ╡х╣│ф╜Оф║ОVREFцЧ╢я╝Мщй▒хКихЩиш╛УхЗ║х╝АхРпя╝Мх░ЖCANHцЛЙщлШя╝МCANLцЛЙф╜ОуАВTXDш╛УхЕех╝ХшДЪцВмчй║цЧ╢я╝Мщй▒хКихЩиш╛УхЗ║хЕ│щЧнуАВTXDш╛УхЕех╝ХшДЪхПпцЙ┐хПЧ - 0.3VшЗ│44VчЪДчФ╡хОЛшАМф╕НцНЯхЭПуАВ
- GNDя╝Их╝ХшДЪ2я╝Йя╝ЪцОехЬ░
- VCCя╝Их╝ХшДЪ3я╝Йя╝ЪцнгчФ╡ц║Рш╛УхЕе я╝Ъцнгх╕╕х╖еф╜ЬцЧ╢чФ╡ц║Рф╕║4.75VшЗ│5.25VуАВхЬицА╗ч║┐цЬкчлпцОечЪДцГЕхЖ╡ф╕Ля╝МхПпф╜┐чФищлШш╛╛44VчЪДчФ╡ц║Рх╖еф╜ЬуАВхЬицА╗ч║┐цнгх╕╕члпцОечЪДцГЕхЖ╡ф╕Лф╜┐чФищлШчФ╡хОЛф╛ЫчФ╡я╝Мф╝ЪхЫачГнхЕ│цЦнчФ╡ш╖пхРпхКишАМхп╝шЗ┤ш┐Зх║жхКЯшАЧхТМц┐Ац┤╗уАВVCCх║Фф╜┐чФих░╜хПпшГ╜ф╜ОчнЙцХИф╕▓шБФчФ╡щШ╗я╝ИESRя╝ЙчЪД0.1╬╝FчФ╡хо╣ш┐ЫшбМхО╗шАжя╝Мф╕ФчФ╡хо╣х║Фх░╜щЗПщЭаш┐СчФ╡ц║Рх╝ХшДЪцФ╛ч╜оуАВ
- RXDя╝Их╝ХшДЪ4я╝Йя╝ЪцОецФ╢хЩиTTLчФ╡х╣│щА╗ш╛Сш╛УхЗ║ я╝ЪщлШчФ╡х╣│ш╛УхЗ║шбичд║щЪРцАзчК╢цАБя╝ИщЫ╢чФ╡хОЛх╖охИЖцА╗ч║┐я╝ЙуАВцШ╛цАзчК╢цАБх╝║хИ╢ф╜┐цОецФ╢хЩиш╛УхЗ║ф╕║ф╜ОчФ╡х╣│уАВ
- VREFя╝Их╝ХшДЪ5я╝Йя╝ЪхПВшАГчФ╡хОЛш╛УхЗ║ я╝ЪхПВшАГчФ╡хОЛшо╛хоЪTXDш╛УхЕещШИхА╝ф╗ехПКCANHхТМCANLхдДчЪДщЪРцАзцА╗ч║┐хЕ▒цибчФ╡хОЛуАВхп╣ф║Оф╜ОчФ╡хОЛх╖еф╜Ья╝МVREFч║жф╕║VCC/2 уАВх╜УVCC > 7.5VцЧ╢я╝МVREFч╗┤цМБхЬи3.5VчФ╡х╣│уАВ
- CANLя╝Их╝ХшДЪ6я╝Йя╝ЪCANцА╗ч║┐ф╜ОчФ╡х╣│цХ░цНоч║┐ я╝ЪCANLх╝ХшДЪцШпцОецФ╢хЩичЪДф╕Аф╕кш╛УхЕея╝Мф╣ЯцШпф╜ОчФ╡х╣│щй▒хКихЩиш╛УхЗ║уАВхЬицШ╛цАзчК╢цАБя╝ИTXDф╕║ф╜ОчФ╡х╣│я╝Йф╕Ля╝Мщй▒хКихЩих░ЖCANLх╝ХшДЪцЛЙшЗ│ш╖ЭGND 1Vф╗ехЖЕуАВхЬищЪРцАзчК╢цАБя╝ИTXDф╕║щлШчФ╡х╣│я╝Йф╕Ля╝Мщй▒хКихЩиш╛УхЗ║ф┐ЭцМБщлШщШ╗цАБуАВCANLх╝ХшДЪхПпхЬицШ╛цАзуАБщЪРцАзуАБх╛ЕцЬ║цИЦцЦнчФ╡цибх╝Пф╕Ля╝МцЙ┐хПЧ - 60VшЗ│60VчЪДчФ╡хОЛцХЕщЪЬуАВчЙЗф╕КESDф┐ЭцКдчмжхРИIEC - 1000 - 4 - 2цаЗхЗЖуАВ
- CANHя╝Их╝ХшДЪ7я╝Йя╝ЪCANцА╗ч║┐щлШчФ╡х╣│цХ░цНоч║┐ я╝ЪCANHх╝ХшДЪцШпцОецФ╢хЩичЪДф╕Аф╕кш╛УхЕея╝Мф╣ЯцШпщлШчФ╡х╣│щй▒хКихЩиш╛УхЗ║уАВхЬицШ╛цАзчК╢цАБя╝ИTXDф╕║ф╜ОчФ╡х╣│я╝Йф╕Ля╝Мщй▒хКихЩих░ЖCANHх╝ХшДЪцЛЙшЗ│ш╖ЭVCC 1Vф╗ехЖЕуАВхЬищЪРцАзчК╢цАБя╝ИTXDф╕║щлШчФ╡х╣│я╝Йф╕Ля╝Мщй▒хКихЩиш╛УхЗ║ф┐ЭцМБщлШщШ╗цАБуАВCANHх╝ХшДЪхПпхЬицШ╛цАзуАБщЪРцАзуАБх╛ЕцЬ║цИЦцЦнчФ╡цибх╝Пф╕Ля╝МцЙ┐хПЧ - 60VшЗ│60VчЪДчФ╡хОЛцХЕщЪЬуАВчЙЗф╕КESDф┐ЭцКдчмжхРИIEC - 1000 - 4 - 2цаЗхЗЖуАВ
- RSя╝Их╝ХшДЪ8я╝Йя╝ЪцЦЬчОЗцОзхИ╢ я╝Ъшпех╝ХшДЪцШпхдЪхКЯшГ╜цОзхИ╢х╝ХшДЪуАВх╜УRSф╕║щлШчФ╡х╣│я╝ИVRS > 4Vя╝ЙцЧ╢я╝МчФ╡ш╖пш┐ЫхЕеф╜ОхКЯшАЧх╛ЕцЬ║цибх╝ПуАВхЬих╛ЕцЬ║цибх╝Пф╕Ля╝Мщй▒хКихЩихзЛч╗ИхдДф║ОщлШщШ╗я╝ИщЪРцАзя╝ЙчК╢цАБуАВцОецФ╢хЩиф╗еф╜ОхКЯшАЧя╝ИцЕвщАЯя╝ЙчЫСцОзцибх╝Пш┐РшбМуАВцОецФ╢хИ░чЪДцХ░цНохПпшГ╜ф╝Ъхп╝шЗ┤ч│╗ч╗ЯтАЬхФдщЖТтАЭшЗ│хЕихКЯшГ╜чК╢цАБуАВх╜УRSщАЪш┐Зх░Пф║О3k╬йчЪДчФ╡щШ╗цОехЬ░цЧ╢я╝МхоЮчО░хЕищАЯцнгх╕╕ш┐РшбМуАВRSчЪДш╛УхЗ║чФ╡ц╡БхЬиф╜ОцАБцЧ╢щЩРхИ╢ф╕║500╬╝AуАВщАЪш┐Зш┐ЮцОехдзф║О3k╬йчЪДчФ╡щШ╗цИЦф╜┐чФичФ╡ц╡Бц║РцЭецОзхИ╢RSчЪДш╛УхЗ║я╝МхПпхоЮчО░хп╣CANHхТМCANLцХ░цНош╛УхЗ║ш╜мцНвщАЯчОЗчЪДцОзхИ╢уАВ
чФ╡чЙ╣цАз
хЕ╕хЮЛцАзшГ╜чЙ╣х╛Б
-
LT1796я╝ЪщлШцАзшГ╜CANцФ╢хПСхЩичЪДхНУш╢Кф╣ЛщАЙ2026-01-05 564
-
SiLM5150SDC-DGщлШщЪФчж╗х╝║х║жуАБх╕жцХЕщЪЬф┐ЭцКдчЪДCAN FDцФ╢хПСхЩи2025-09-24 1711
-
ц╖▒х║жшзгцЮРя╝ЪSiLM1040SCA-DG-цФпцМБCAN FDф╕Ох╝║хдзф┐ЭцКдчЪД┬▒65VцХЕщЪЬф┐ЭцКдCANцФ╢хПСхЩи2025-07-10 3201
-
LTC2875хЕ╖┬▒60VцХЕщЪЬф┐ЭцКдхКЯшГ╜чЪД3.3VцИЦ5V 25kV ESDщлШщАЯCANцФ╢хПСхЩицКАцЬпцЙЛхЖМ2025-05-27 2404
-
TCAN1043xx-Q1хЕ╖цЬЙCAN FDхТМхФдщЖТхКЯшГ╜чЪДф╜ОхКЯшАЧцХЕщЪЬф┐ЭцКдCANцФ╢хПСхЩицХ░цНошби2024-07-03 933
-
TCAN1051хЕ╖цЬЙCAN FDхТМцХЕщЪЬф┐ЭцКдхКЯшГ╜чЪДCANцФ╢хПСхЩицХ░цНошби2024-07-01 596
-
TCAN1051-Q1хЕ╖цЬЙCAN FDхТМцХЕщЪЬф┐ЭцКдхКЯшГ╜чЪДц▒╜ш╜жч▒╗CANцФ╢хПСхЩицХ░цНошби2024-06-22 598
-
TCAN1042-Q1хЕ╖цЬЙCAN FDхТМцХЕщЪЬф┐ЭцКдхКЯшГ╜чЪДц▒╜ш╜жч▒╗CANцФ╢хПСхЩицХ░цНошби2024-06-19 535
-
LT1796я╝Ъш┐ЗхОЛцХЕщЪЬф┐ЭцКдCANцФ╢хПСхЩицХ░цНошби2021-05-20 1050
-
ш┐ЗхОЛцХЕщЪЬф┐ЭцКдCANцФ╢хПСхЩиLT1796чЫ╕хЕ│ш╡ДцЦЩф╕Лш╜╜2021-03-31 1733
-
LT1796 хЕ╖ш┐ЗхОЛцХЕщЪЬф┐ЭцКдхКЯшГ╜чЪД CAN цФ╢хПСхЩи2019-02-22 507
-
MAX13051 ┬▒80VцХЕщЪЬф┐ЭцКдчЪДCANцФ╢хПСхЩи2012-11-15 1888
хЕищГи0цЭбшпДшо║

х┐лцЭехПСшбиф╕Аф╕Лф╜ачЪДшпДшо║хРз !
