

东芝布局汽车LiDAR半导体业务_2025年市场需求将达3000万台
汽车电子
描述
据麦姆斯咨询报道,日本东芝(TOSHIBA)将深入开发汽车LiDAR(激光雷达)半导体业务,主要面向:(1)LiDAR中使用的光接收元件;(2)测量IC(模拟前端IC);(3)电源IC(图1)。东芝目前正在研发这三项技术,预计到2020年完成前期开发并达到实际应用水平,然后计划将其商业化。其高精度测量IC技术和错误检测去除技术,可使LiDAR传感器的探测范围相比传统方案提高约1.8倍。
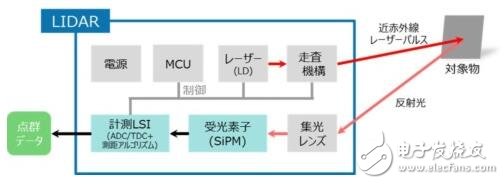
图1 典型LiDAR结构框图
2025年市场需求将达3000万台
东芝对汽车LiDAR市场寄予厚望。根据该公司预测,未来L3级或更高级别的自动驾驶汽车数量将持续增长,这将推动LiDAR需求迅速增长。市场预计一辆汽车将安装多个LiDAR传感器,到2025年,每年的市场需求将超过3000万台。在此之后,汽车LiDAR市场仍将保持继续增长,东芝预测2025~2035年的复合年增长率(CAGR)将达到18%。
东芝开发的测量IC专为采用“直接ToF(飞行时间)”距离测量方法的LiDAR传感器而设计。 利用直接ToF距离测量方法,从红外激光器发射脉冲光,然后利用光接收元件将从物体反射回的光转换为电信号,并将其输入到测量IC,利用激光从发射到反射光返回的时间估算距离。 为了获取二维距离图像,通常使用多面镜扫描激光束。在测量IC中,执行距离图像生成等处理。
车载LiDAR需要更远的探测距离和高像素的距离图像(多个距离测量点)。例如,以时速120公里的速度行驶的车辆,其LiDAR传感器探测距离需要达到200m。
为了实现远距离探测和高像素,有必要提高测距精度(准确率)的同时,降低错误检测。
SAT智能累积技术,紧盯目标物体
为了提高测距精度,东芝开发了一种被称为“SAT(Smart Accumulation Technique,智能累积技术)”的方法,即使在各种不同的噪音环境中也能更准确地实现距离测量,该研究成果已于2018年2月在ISSCC上公布。
在上述直接ToF距离测量方法中,随着被测物体的距离增加,入射到光接收元件上的太阳光量也随着反射光返回而增加(图2)。此时太阳光等背景光线便成为噪音,使SNR(信噪比)下降。因此,需要通过累积远距离图像的多个像素来提高SNR。然而,如果采用简单地累积,远距离图像的图像质量会将低,如同进行了模糊处理,使LiDAR系统难以探测并识别诸如行人和骑行者等物体(图3)。
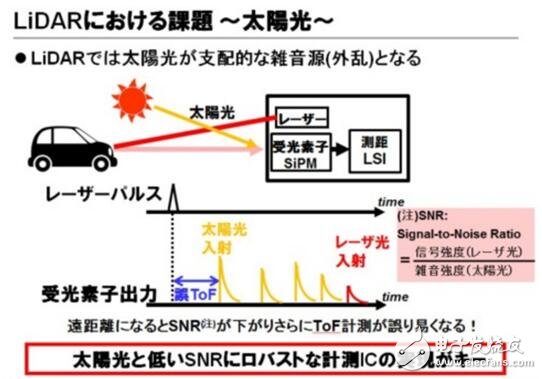
图2 太阳光等强烈的背景光为LiDAR带来的挑战
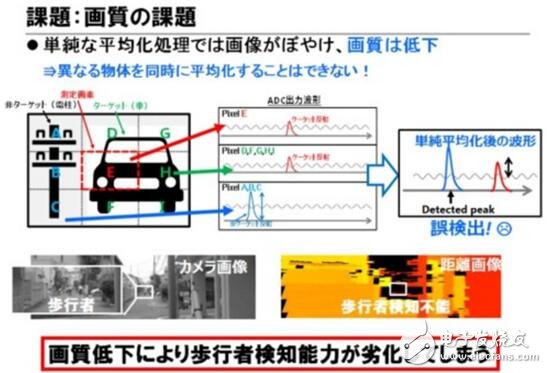
图3 简单平均处理的画质问题,降低了行人的识别率
对此,SAT对每个物体(如汽车和电线杆)进行反射光分类,仅累积并平均处理来自目标物体的反射光(图4),并在处理中抑制图像质量劣化。与传统累积技术相比,东芝SAT分辨率获得了4倍提高,由此实现高达200m的高画质LiDAR成像。
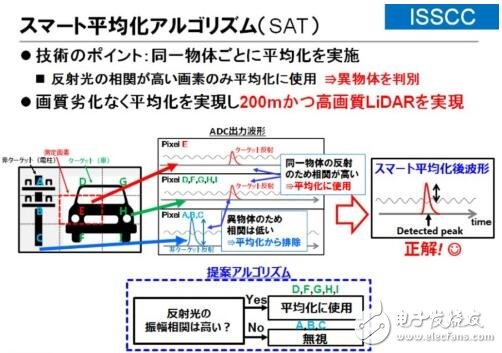
图4 SAT智能累积技术概览
利用新指标去除错误探测
但是,在进行平均处理时,会产生一种被称为“距离聚集(簇)”的现象,在以往的错误检测消除方法(消噪方法)中,有可能导致来自远处物体的正确的探测结果被消除(图5)。根据传统方法,例如,使用亮度作为指标,根据远距离图像的每个像素的大小是否超过阈值来判断/去除噪音(图6),有可能造成错误检测。
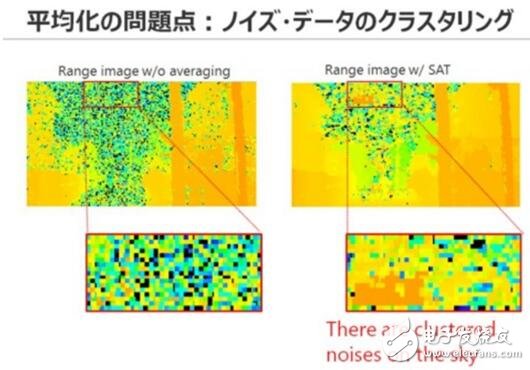
图5 平均处理中的距离聚集问题
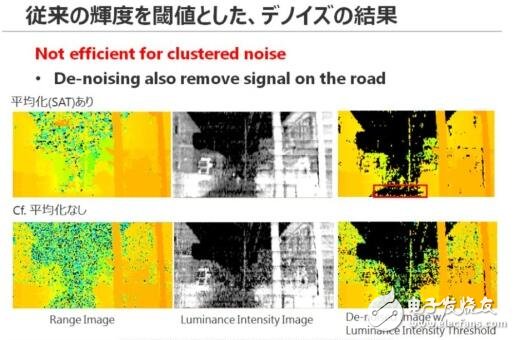
图6 传统的噪声去除方法对聚集噪音不够有效
为此,东芝开发了一种算法,通过使用另一种被称为“信赖度”的指标来消除错误检测。东芝研究发现:“簇大小(N)”与亮度(L)平方的乘积与常数值(a)的相关性(N= a/ L2),并基于此设置“信赖度”,排除错误检测(图7)。此外,该算法能够用小规模且低功耗的电路来实现,电路规模和功耗都可控制在测量IC的1%以下。
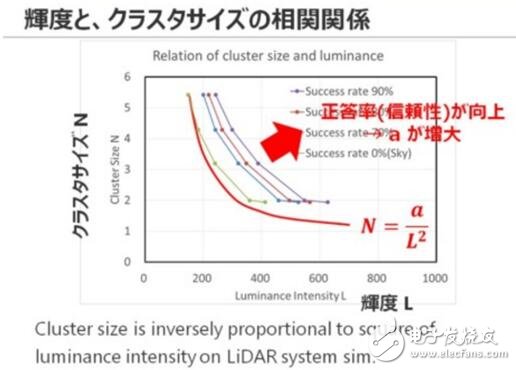
图7 簇大小和亮度之间的关系:在LiDAR系统模拟中,簇大小与亮度平方成反比
结合上述SAT智能累积技术和新开发的错误检测去除技术,去除99%的错误检测,LiDAR传感器的探测范围相比传统方案可以提高约1.8倍(图8和图9)。
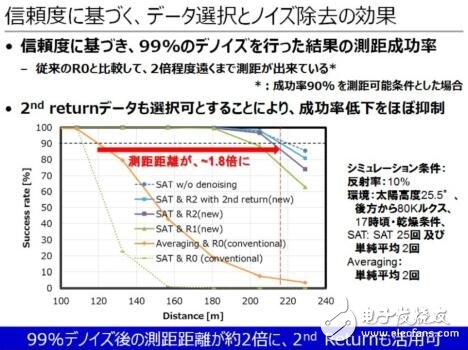
图8 基于“信赖度”的噪声去除效果
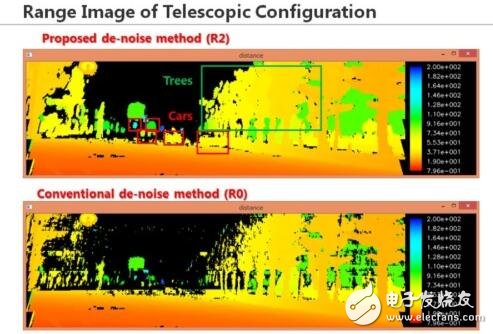
图9 东芝提出的新技术去除噪声的结果(上方)和现有传统技术去除噪声的结果(下方)
另外,东芝还正在进行光接收元件的开发。现有的LiDAR传感器通常使用APD(雪崩光电二极管)作为光接收元件。东芝正着手开发比APD更适合于高灵敏度和多信道应用的SiPM(基于Si的电子放大器)。尽管SiPM已经广泛应用于医疗设备和检测设备中的光子计数,但它们和LiDAR传感器所常用的光波长不同。因此,东芝正在开发可用于LiDAR传感器在约900nm波长范围内具有高灵敏度的SiPM。
-
东芝斥资千亿日元加速半导体业务扩张2024-06-13 1351
-
东芝在日本新建功率半导体后端生产设施,预计2025年春季投产2024-03-12 2064
-
新能源汽车市场热度不断高涨,十家车规级芯片上市公司一览2022-11-23 3435
-
全球功率半导体市场格局:前十名供应商全是海外企业?2022-11-11 5036
-
安森美半导体怎么推动电动汽车充电桩市场发展?2019-08-06 4587
-
汽车电子市场难点2019-07-29 4243
-
汽车系统测试仪市场需求将高速增长2018-09-10 1841
-
中国半导体发展现状及未来展望2018-09-02 17743
-
东芝开发汽车LiDAR(激光雷达)半导体业务_到2020年商业化2018-04-23 2231
-
今年半导体市场不看手机脸色2018-01-29 4175
-
2016年全球半导体营收排行2016-11-22 6318
-
全球半导体产值再创新高,AOI设备需求热度有望保持2016-02-16 5293
-
模拟半导体市场需求强劲:2013年营收将超越500亿美元2012-10-12 1891
-
汽车半导体行业2012年或将基本实现复苏2012-01-15 2915
全部0条评论

快来发表一下你的评论吧 !
