

超声波避障传感器在AGV行业中的应用
描述
近年来微机技术、人工智能和传感测控技术的飞速发展使得AGV也更加智能化,人性化,使AGV朝着智能机器人的方向提升。一个功能完善的AGV系统通常由3大部分组成:行走机构、传感系统和控制系统。行走机构是AGV实现运动的基础,决定AGV的运动空间和自由。传感系统决定其导航方式,主流使用激光传感器、超声波传感器、光电传感器、磁传感器、CCD摄像机、红外传感器或者GPS定位。目前在部分已知或未知的环境中运行稳定同时又要求自主执行任务时,AGV必须要有足够的安全保证,用传感器感知外界环境、分析外界条件,然后通过适当的方式来理解环境,对于工作在复杂或非常规化环境中的自主式AGV,要进一步提高其自主判断能力,依靠自身模式识别及障碍物识别,实现正常工作。对AGV的智能化有很重要的意义。
避障是指移动机器人在行走过程中,通过传感器感知到在其规划路线上存在静态或动态障碍物时,按照一定的算法实时更新路径,绕过障碍物,最后达到目标点。
不管是要进行导航规划还是避障,感知周边环境信息是第一步。就避障来说,AGV行业安全首要考虑,AGV防撞避障可分为两类设计:一是接触式设计,起到防撞保护作用,常用接触类传感器(如压电传感器,机械式开关等)安装在车体的底部,检测外围非接触式传感器(红外线,超声波,激光等)探测死角,起到缓冲保护作用;二是非接触式设计,起到避障作用,常用非接触类传感器安装在车体稍高正前方和正后方部位,用于车辆前进或者后退时起到避开障碍作用。目前避障使用的传感器多种多样,各有不同的原理和特点,下面我们具体来了解一下超声波传感器在AGV避障中的作用。
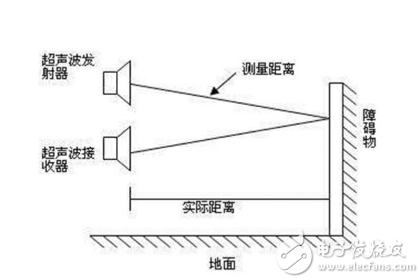
目前大面积识别障碍物是超声波传感器在移动应用中的常见任务。物体和人员都可以被识别,从而采取停车或绕过障碍物等动作,保证设备及人员安全。同时,超声波传感器可以实时测量距离,持续监控接近过程,因此在AGV到广泛应用。在防撞应用中超声波传感器防撞的原理是利用超声波遇到障碍物能反射的特性,根据超声波发射与接收的往返时间及声速检测与障碍物的距离,防止与障碍物碰撞。因为超声波发射出来波束是一定的范围空间发射出去的,所以超声波防撞弥补了激光防撞只有水平面防撞的弊端,使得激光无轨导航叉车防撞更全面安全。由于超声波在空气中的速度与温湿度有关,在比较精确的测量中,需把温湿度的变化和其它因素考虑进去。
在实际应用的过程中AGV防撞避障可采用工釆网MaxBotix 超声波避障传感器 - MB1043,该传感器是一款高分辨率(1mm)、高精度低功耗的超声波传感器,通过软件可以在电脑上轻松实现传感器功能参数设置和调试,简单明了地实现传感器的个性化调整。它在设计上,不仅对干扰噪音做了处理,具备抗噪音干扰能力。而且对于大小不同的目标,和变化的供电电压,做了灵敏度的补偿。另外还具备标准的的内部温度补偿,使得测量出来的距离数据更加精准。应用于室内环境,它是一款很不错的低成本解决方案!
- 相关推荐
- 超声波传感器
-
基于超声波传感器的测距系统设计2009-12-15 0
-
msp430的超声波测距避障和循迹避障小车程序,跪求!2015-04-17 0
-
求HC-SR04超声波传感器的避障程序啊2016-04-04 0
-
超声波传感器在机器人中的应用2018-08-09 0
-
超声波避障技术助力智能扫地机器人的市场2020-05-11 0
-
超声波传感器的优势及原理2020-06-19 0
-
如何采用STC89C52单片机实现超声波红外避障语音导盲仪设计2021-11-10 0
-
基于超声波传感器的AGV避障模块设计与实现2015-12-08 955
-
超声波传感器在智能小车避障系统中的应用2017-12-07 13712
-
使用超声波传感器和Arduino构建一个避障机器人2022-09-08 3830
-
水下超声波避障传感器应用2023-05-20 1291
-
泳池清洁机器人避障离不开超声波测距传感器2022-09-09 2085
-
AGV小车使用避障雷达2024-05-20 935
-
解读工业机器人避障常用的视觉传感器、激光传感器、红外传感器、超声波传感器2024-06-19 2460
全部0条评论

快来发表一下你的评论吧 !
