

一文读懂毫米波雷达测方位原理及优势
基础知识
描述
汽车毫米波雷达基本原理
毫米波是指波长在1-10mm的电磁波,其带宽大,分辨率高,天线部件尺寸小,能适应恶劣环境。车用毫米波雷达,通常采用结构简单成本较低,适合近距离探测的FMCW(调频连续波)雷达体制。雷达天线向外发出一系列连续调频毫米波,频率随时间按调制电压的规律变化,一般是连续的三角波,发射与接收信号如图2所示。图中实线是发射信号,虚线是相对静止和相对运动物体的反射信号。反射与发射信号波形相同,只是差一个延时时间td。
td=2R/C(1)
式中,R为目标距离,c光速。
发射信号与反射信号在某一时刻的频差即为混频输出的中频频率fb。相对运动物体反射信号由于多普勒效应产生的频移的原因。在三角波的上升沿与下降沿输出的中频频率分别为fb+、fb-。以下公式成立:
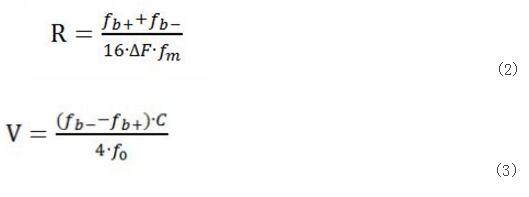
从而得到目标车辆的距离R与相对运动速度v。由式(2)(3)可知,毫米波雷达信号中频频率fb的确定是求出R、V的关键。fb的确定即是对发射和反射信号的频差进行频谱分析。信号的频谱分析主要有FFT法和非FFT法。所谓FFT法,即是对被分析的信号进行傅里叶变换,将其从时域变到频域,在频域进行分析,必要时再通过傅里叶逆变换,变回时域的分析方法。而非FFT方法则是通过其他的途径,获得信号的频率参数,如最大熵法、MUSIC法等。综合考虑方法的复杂性、实时性、稳定性,对汽车雷达而言,频谱分析应首选FFT法,这种方法比较成熟、现容易、实时性强,适合于汽车运行状况下信号的实时处理。
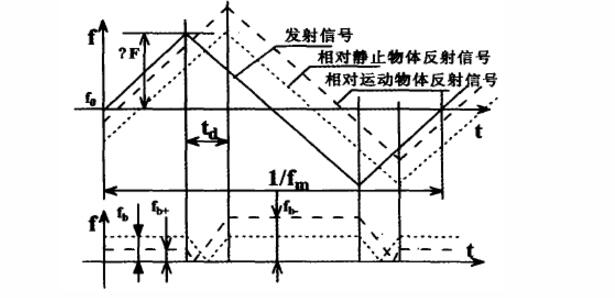
图 2 FMCW发射及回波信号
汽车毫米波雷达结构
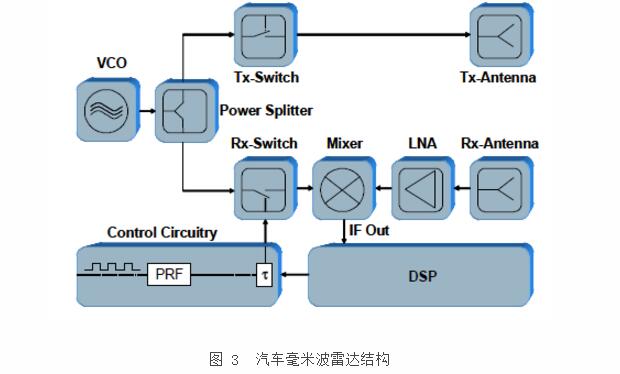
图3为线性调频雷达(LFCW)汽车毫米波雷达结构,包括天线、收发模块、信号处理模块和报警模块。 射频收发前端是雷达系统的核心部件。国内外已经对前端进行了大量深入研究,并取得了长足的进展。已经研制出各种结构的前端,主要包括波导结构前端,微带结构前端以及前端的单片集成。国内研制的射频前端主要是波导结构前端。一个典型的射频前端主要包括天线、线性VCO、放大器、平衡混频器部分。前端混频输出的中频信号经过中频放大送至后级数据处理部分。数据处理部分的基本目标是消除不必要信号(如杂波)和干扰信号,并对经过中频放大的混频信号进行处理,从信号频谱中提取目标距离和速度等信息。
毫米波雷达测方位的原理
在汽车主动安全领域,汽车毫米波雷达传感器是核心部件之一,其中77GHZ毫米波雷达是智能汽车上必不可少的关键部件,是能够在全天候场景下快速感知0-200米范围内周边环境物体距离、速度、方位角等信息的传感器件。那么它是如何计算被监测目标的位置、速度和方向的呢?
1、位置
毫米波雷达通过发射天线发出相应波段的有指向性的毫米波,当毫米波遇到障碍目标后反射回来,通过接收天线接收反射回来的毫米波。根据毫米波的波段,通过公式计算毫米波在途中飞行的时间×光速÷2,再结合前车行驶速度和本车的行驶速度因素,就可以知道毫米波雷达(本车)和目标之间的相对距离了,同时也就知道目标的位置。
2、速度
此外,根据多普勒效应,毫米波雷达的频率变化、本车及跟踪目标的相对速度是紧密相关的,根据反射回来的毫米波频率的变化,可以得知前方实时跟踪的障碍物目标和本车相比的相对运动速度。因此,表现出来就是,传感器发出安全距离报警时,若本车继续加速、或前监测目标减速、或前监测目标静止的情况下,毫米波反射回波的频率将会越来越高,反之则频率越来越低。
3、方位角
关于被监测目标的方位角测量问题,毫米雷达的探测原理是:通过毫米波雷达的发射天线发射出毫米波后,遇到被监测物体,反射回来,通过毫米波雷达并列的接收天线,通过收到同一监测目标反射回来的毫米波的相位差,就可以计算出被监测目标的方位角了。原理图如下:
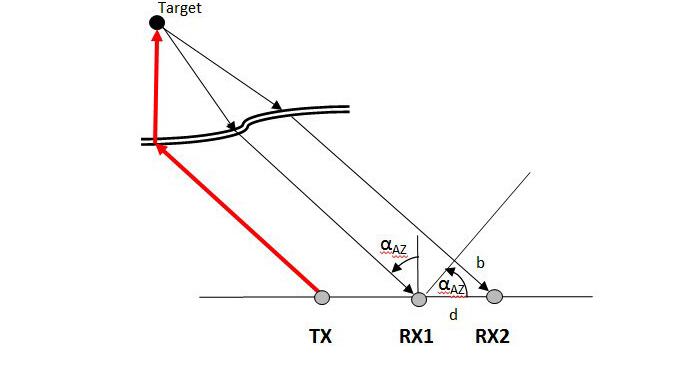
方位角αAZ是通过毫米波雷达接收天线RX1和接收天线RX2之间的几何距离d,以及两根毫米波雷达天线所收到反射回波的相位差b,然后通过三角函数计算得到方位角αAZ的值,这样就可以知道被监测目标的方位角了。
位置、速度和方位角监测是毫米波雷达擅长之处,再结合毫米波雷达较强的抗干扰能力,可以全天候全天时稳定工作,因此毫米波雷达被选为汽车核心传感技术。
毫米波雷达相比激光雷达的优势
随着自动驾驶的火热,激光雷达受到前所未有的追捧,因为其具有高精度、大信息量、不受可见光干扰的优势。但我们可以注意到,目前主流的自动驾驶方案并未完全抛弃毫米波雷达,这又是什么原因呢?
首先就是大家都知道的天气原因。激光的波长远小于毫米波雷达(nm vs mm),所以雾霾导致激光雷达失效并不是段子。同样的原因,毫米波雷达的探测距离可以轻松超过200米,而激光雷达目前的性能一般不超过150米,所以对于高速公路跟车这样的情景,毫米波雷达能够做的更好。
其次,毫米波雷达便宜,作为成熟产品,毫米波雷达目前的价格大概在1.5千左右,而激光雷达的价格目前仍然是以万作为单位计算的。并且由于激光雷达获取的数据量远超毫米波雷达,所以需要更高性能的处理器处理数据,更高性能的处理器同时也意味着更高的价格。所以对于工程师而言,在简单场景中,毫米波雷达仍然是最优选择。
-
毫米波雷达目标方位角计算2016-11-23 8532
-
毫米波雷达方案对比2018-08-04 12455
-
车载毫米波雷达的技术原理与发展2019-05-10 6165
-
车载毫米波雷达的原理是什么?2019-08-07 7612
-
毫米波雷达VS激光雷达VS超声波雷达2019-09-19 21240
-
毫米波雷达(一)2019-12-16 14951
-
毫米波雷达的特点是什么2021-07-30 7360
-
智能安防毫米波雷达感应模块,智慧传感雷达技术应用2021-09-15 1775
-
毫米波雷达工作原理,雷达感应模块技术,有什么优势呢?2021-09-22 2857
-
漫谈车载毫米波雷达历史2022-03-09 12050
-
ADAS系统无人驾驶的眼睛毫米波雷达2023-04-18 2275
-
毫米波雷达的应用场景_毫米波雷达技术及应用大解析2018-04-24 48315
-
毫米波雷达的频率_毫米波雷达的应用2020-07-24 12340
-
一文了解毫米波雷达传感技术2021-06-17 7114
-
毫米波雷达具有哪些特点和优势2024-08-16 4873
全部0条评论

快来发表一下你的评论吧 !
