

激光雷达和毫米波雷达的区别介绍
基础知识
描述
什么是激光雷达
激光雷达,是以发射激光束探测目标的位置、速度等特征量的雷达系统。其工作原理是向目标发射探测信号(激光束),然后将接收到的从目标反射回来的信号(目标回波)与发射信号进行比较,作适当处理后,就可获得目标的有关信息,如目标距离、方位、高度、速度、姿态、甚至形状等参数,从而对飞机、导弹等目标进行探测、跟踪和识别。它由激光发射机、光学接收机、转台和信息处理系统等组成,激光器将电脉冲变成光脉冲发射出去,光接收机再把从目标反射回来的光脉冲还原成电脉冲,送到显示器。
激光雷达构成原理
LIDAR是一种集激光,全球定位系统(GPS)和惯性导航系统(INS)三种技术与一身的系统,用于获得数据并生成精确的DEM。这三种技术的结合,可以高度准确地定位激光束打在物体上的光斑。它又分为目前日臻成熟的用于获得地面数字高程模型(DEM)的地形LIDAR系统和已经成熟应用的用于获得水下DEM的水文LIDAR系统,这两种系统的共同特点都是利用激光进行探测和测量,这也正是LIDAR一词的英文原译,即:LIght Detection And Ranging - LIDAR。
激光本身具有非常精确的测距能力,其测距精度可达几个厘米,而LIDAR系统的精确度除了激光本身因素,还取决于激光、GPS及惯性测量单元(IMU)三者同步等内在因素。随着商用GPS及IMU的发展,通过LIDAR从移动平台上(如在飞机上)获得高精度的数据已经成为可能并被广泛应用。
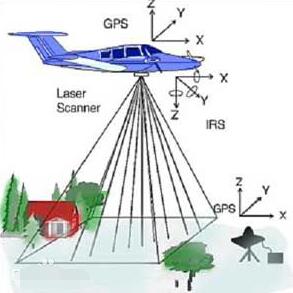
LIDAR系统包括一个单束窄带激光器和一个接收系统。激光器产生并发射一束光脉冲,打在物体上并反射回来,最终被接收器所接收。接收器准确地测量光脉冲从发射到被反射回的传播时间。因为光脉冲以光速传播,所以接收器总会在下一个脉冲发出之前收到前一个被反射回的脉冲。鉴于光速是已知的,传播时间即可被转换为对距离的测量。结合激光器的高度,激光扫描角度,从GPS得到的激光器的位置和从INS得到的激光发射方向,就可以准确地计算出每一个地面光斑的坐标X,Y,Z。激光束发射的频率可以从每秒几个脉冲到每秒几万个脉冲。举例而言,一个频率为每秒一万次脉冲的系统,接收器将会在一分钟内记录六十万个点。一般而言,LIDAR系统的地面光斑间距在2-4m不等。
激光雷达的工作原理与雷达非常相近,以激光作为信号源,由激光器发射出的脉冲激光,打到地面的树木、道路、桥梁和建筑物上,引起散射,一部分光波会反射到激光雷达的接收器上,根据激光测距原理计算,就得到从激光雷达到目标点的距离,脉冲激光不断地扫描目标物,就可以得到目标物上全部目标点的数据,用此数据进行成像处理后,就可得到精确的三维立体图像。
激光雷达最基本的工作原理与无线电雷达没有区别,即由雷达发射系统发送一个信号,经目标反射后被接收系统收集,通过测量反射光的运行时间而确定目标的距离。至于目标的径向速度,可以由反射光的多普勒频移来确定,也可以测量两个或多个距离,并计算其变化率而求得速度,这是、也是直接探测型雷达的基本工作原理。
激光雷达特点
精度高,稳定性强。
但是激光雷达通过发射光束进行探测因此探测范围窄,光束受遮挡后就无法正常使用,因此在雨雪雾霾天,沙尘暴等恶劣天气不能开启,受环境影响大。并且没有穿透能力,探头必须完全外露才能达到探测效果,对于安装车辆来说影响车辆外形美观。因此,激光雷达防撞器在使用过程中局限性较大。
什么是毫米波雷达
首先我们要明白啥是毫米波,毫米波实质上就是电磁波。毫米波的频段比较特殊,其频率高于无线电,低于可见光和红外线,频率大致范围是10GHz—200GHz。这是一个非常适合车载领域的频段。目前,比较常见的车载领域的毫米波雷达频段有三类。
1、24—24.25GHz这,目前大量应用于汽车的盲点监测、变道辅助。雷达安装在车辆的后保险杠内,用于监测车辆后方两侧的车道是否有车、可否进行变道。这个频段也有其缺点,首先是频率比较低,另外就是带宽(Bandwidth)比较窄,只有250MHz。
2、77GHz,这个频段的频率比较高,国际上允许的带宽高达800MHz。据介绍,这个频段的雷达性能要好于24GHz的雷达,所以主要用来装配在车辆的前保险杠上,探测与前车的距离以及前车的速度,实现的主要是紧急制动、自动跟车等主动安全领域的功能。
3、79GHz—81GHz,这个频段最大的特点就是其带宽非常宽,要比77GHz的高出3倍以上,这也使其具备非常高的分辨率,可以达到5cm。
原理:振荡器会产生一个频率随时间逐渐增加的信号,这个信号遇到障碍物之后,会反弹回来,其时延是2倍距离/光速。返回来的波形和发出的波形之间有个频率差,这个频率差和时延是呈线性关系的:物体越远,返回的波收到的时间就越晚,那么它跟入射波的频率差值就越大。
将这两个频率做一个减法,就可以得到二者频率的差频(差拍频率),通过判断差拍频率的高低就可以判断障碍物的距离。
根据国内产业机构调查,国内2014年汽车毫米波雷达销量约为120万颗,2015年约为180万颗。主要应用为盲点检测和后方车辆提醒的中短距雷达(24Ghz),每车需要两颗。
毫米波雷达特点
精准度高,抗干扰能力强 探测距离远 ,呈广角探测 ,探测范围广,作用时速可达到120码以上,全天候工作,雨雪雾霾沙尘暴等恶劣天气,均能开启正常使用。穿透能力强,安装也可以完全隐蔽,不影响车辆整体外观。因此毫米波雷达技术更适用于汽车防撞领域。
激光雷达和毫米波雷达区别
简单来说激光雷达主要是通过发射激光束来探测周遭环境,车载激光雷达普遍采用多个激光发射器和接收器,建立三维点云图,从而达到实时环境感知的目的。
激光雷达的优势在于其探测范围更广,探测精度更高。但是,激光雷达的缺点也很明显:在雨雪雾等极端天气下性能较差;采集的数据量过大;十分昂贵。
技术上来讲,目前传统激光雷达技术已经很成熟,而固态激光雷达和混合固态激光雷达尚处于起步阶段,因此各企业当前在自动驾驶汽车使用的激光雷达,多以机械式激光雷达为主。
而从整个激光雷达行业来看,高精度车载激光雷达产品生产商主要集中在国外,如美国的Velodyne、Quanegy,德国的IBEO,国内近几年也开始出现一些专注于车载激光雷达的企业,以及一些从其他领域转行而来的激光雷达企业,因看中自动驾驶汽车广阔发展前景,纷纷投身车载激光雷达产品的研发,目前来看成果显著。
所谓的毫米波雷达,就是指工作频段在毫米波频段的雷达,测距原理跟一般雷达一样,也就是把无线电波(雷达波)发出去,然后接收回波,根据收发之间的时间差测得目标的位置数据。毫米波雷达就是这个无线电波的频率是毫米波频段。
毫米波雷达从上世纪起就已在高档汽车中使用,技术相对成熟。毫米波的波长介于厘米波和光波之间,因此毫米波兼有微波制导和光电制导的优点,且其引导头具有体积小、质量轻和空间分辨率高的特点。此外,毫米波导引头穿透雾、烟、灰尘的能力强,相比于激光雷达是一大优势。
毫米波雷达的缺点也十分直观,探测距离受到频段损耗的直接制约(想要探测的远,就必须使用高频段雷达),也无法感知行人,并且对周边所有障碍物无法进行精准的建模。
小编推荐阅读:
激光雷达的标定_激光雷达的功能
激光雷达有辐射吗_激光雷达有什么用
-
主流厂牌的毫米波雷达芯片有哪些?2019-09-16 10002
-
毫米波雷达VS激光雷达VS超声波雷达2019-09-19 21241
-
毫米波雷达(一)2019-12-16 14951
-
毫米波雷达的特点是什么2021-07-30 7360
-
毫米波/激光/超声波雷达的区别是什么?2021-09-29 10942
-
漫谈车载毫米波雷达历史2022-03-09 12050
-
一文读懂毫米波雷达测方位原理及优势2018-04-24 35168
-
如何准确分辨出毫米波雷达、激光雷达之间的区别2022-11-17 6326
-
干货:如何准确分辨毫米波雷达、激光雷达之间的区别2020-10-30 2062
-
毫米波雷达和激光雷达到底有什么区别2020-12-29 11708
-
毫米波雷达和激光雷达的有何区别2022-02-06 103203
-
激光雷达和毫米波雷达的区别 哪个才是自动驾驶感知的最优选择?2023-11-22 10804
-
激光雷达与毫米波雷达的区别与联系2023-12-19 6027
-
毫米波雷达与激光雷达比较 毫米波雷达在自动驾驶中的作用2024-12-03 3763
-
激光雷达VS毫米波雷达,优缺点全知道!2025-01-13 4418
全部0条评论

快来发表一下你的评论吧 !
