

步进电机主要在哪些方面应用(四款步进电机电路图)
伺服与控制
描述
步进电机主要运用场合
目前用于电脑绣花机中的步进电机多数为三相混合式步进电机,并采用细分驱动技术可以大大改善步进电机的运行品质,减少转矩波动,抑制振荡,降低噪音,提高步矩分辨率。
第一、步进电机主要用于一些有定位要求的场合,例如:线切割的工作台拖动,植毛机工作台(毛孔定位),包装机(定长度),基本上涉及到定位的场合都用得到。
第二、广泛应用于ATM机、喷绘机、刻字机、写真机、喷涂设备、医疗仪器及设备、计算机外设及海量存储设备、精密仪器、工业控制系统、办公自动化、机器人等领域,特别适合要求运行平稳、低噪音、响应快、使用寿命长、高输出扭矩的应用场合。
第三、步进电机在电脑绣花机等纺织机械设备中有着广泛的应用,这类步进电机的特点是保持转矩不高,频繁启动反应速度快、运转噪音低、运行平稳、控制性能好、整机成本低。
步进电机应用注意事项
1、步进电机应用于低速场合---每分钟转速不超过1000转,(0.9度时6666PPS),最好在1000-3000PPS(0.9度)间使用,可通过减速装置使其在此间工作,此时电机工作效率高,噪音低。
2、步进电机最好不使用整步状态,整步状态时振动大。

3、由于历史原因,只有标称为12V电压的电机使用12V外,其他电机的电压值不是驱动电压伏值,可根据驱动器选择驱动电压(建议:57BYG采用直流24V-36V,86BYG采用直流50V,110BYG采用高于直流80V),当然12伏的电压除12V恒压驱动外也可以采用其他驱动电源,不过要考虑温升。
4、转动惯量大的负载应选择大机座号电机。

5、电机在较高速或大惯量负载时,一般不在工作速度起动,而采用逐渐升频提速,一电机不失步,二可以减少噪音同时可以提高停止的定位精度。
6、高精度时,应通过机械减速、提高电机速度,或采用高细分数的驱动器来解决,也可以采用5相电机,不过其整个系统的价格较贵,生产厂家少,其被淘汰的说法是外行话。
7、电机不应在振动区内工作,如若必须可通过改变电压、电流或加一些阻尼的解决。
8、电机在600PPS(0.9度)以下工作,应采用小电流、大电感、低电压来驱动。
9、应遵循先选电机后选驱动的原则。
四款步进电机电路图
电路图一:
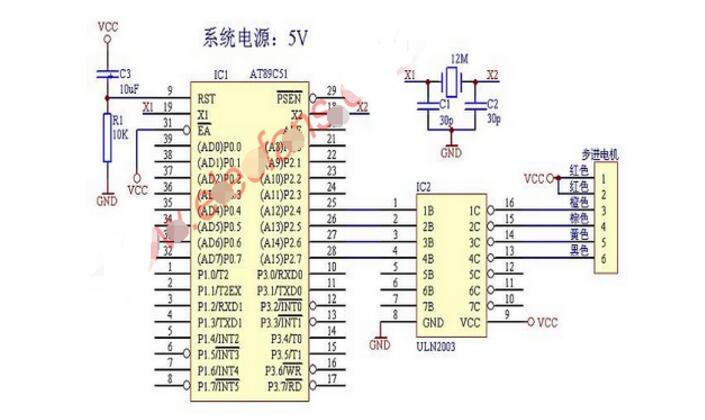
步进电机的驱动电路与51单片机的连接电路图如上;
步进电机的驱动信号必须为脉冲信号!转动的速度和脉冲的频率成正比,
本步进电机步进角为7.5度。一圈360度,需要48个脉冲完成,(上图用6引脚接线端子代替步进电机)。
A组(也就是上图步进电机第三引脚)线圈对应P2.4;
B组(也就是上图步进电机第四引脚)线圈对应P2.5;
C组(也就是上图步进电机第五引脚)线圈对应P2.6;
D组(也就是上图步进电机第六引脚)线圈对应P2.7;
正转次序:AB组--BC组--CD组--DA组(即一个脉冲,正转7.5度)。
电路图二:
步进电机具有快速启停、精确定位的特点,在数字控制领域经常使用步进电机作为位置控制的执行机构。步进电机在快速运行中,要求驱动电路提供给步进电机绕组的驱动电流尽可能地接近其技术指标要求的数值,以产生足够的转矩。由于步进电机是感性负载,当运行速度提高后要提高绕组的工作电流,必须提高电源电压。实际应用中,常采用的控制方式是高低压恒流斩波控制。在笔者给西北轴承厂改造磨床的过程中,设计了一种实用的步进电机驱动电路,它可以驱动75BF003-130BF003四种型号的三相六拍反应式步进电机,最高运行频率每分钟15000步。该电路除具有恒流斩波的特性外,还具有过流保护和超温保护的功能。
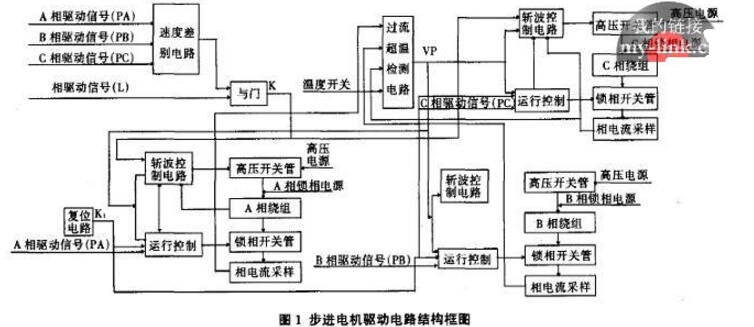
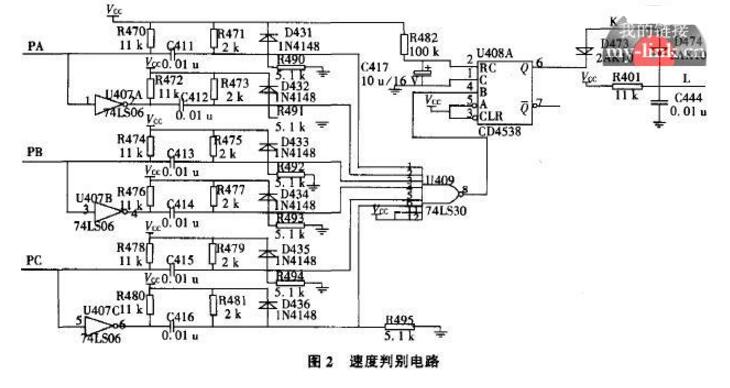
路(图1)由速度判别电路,过流超温检测电路,A、B、C相驱动电路和电源组成。在该电路中,有单片机输出的A相驱动信号(PA)、B相驱动信号(PB)、C相驱动信号(PC)和锁相驱动信号(L),均为低电平有效。驱动步进电机的高压电源采用AC70V整流滤波后供给,锁相电源采用AC4.5V半波整流后供给。另外,电路还需要的+12V和+5V直流电压采用对AC10V和AC5V经过二极管整流滤波后获得,数字电路所需要的电源通过板间接口J401由主机提供。 2各部分电路介绍 2.1速度判别电路 速度判别电路的核心是一片可重触发单稳CD4538(图2)。当单片机控制步进电机运行时,首先将锁相驱动信号L置为高电电平,随后PA、PB、PC按照A→AB→B→BC→C→CA→A(或AC→C→BC→B→AB→A→AC)的顺序依次轮流出现低电平,从而驱动步进电机一步一步地运行。由于在运行过程中,PA、PB和Pc信号至少有一个会出现跳变(上升沿或下降沿),而这种跳变经过由电阻和电容(如R470、C411、R471、R490和D431等)组成的微分电路变成一个负脉冲加到8输入端与非门U409的输入端,进而在其输出端产生一个正脉冲触发单稳U408A;U408A的输出Q与锁相驱动信号L经过由锗开关二极管D473、D474构成的与门去控制A、B、C三相驱动电路的斩波电路。由于U408A的暂态时间大约是1S,因此当步进电机的运行速度低于每秒钟l步时,速度判别电路先输出约1S的高电平,使各相驱动电路进行约1S的恒流斩波动作,使步进电机迅速到位,随后转到锁相状态(步进电机各相的电流降到其工作电流的大约一半),以降低步进电机的功耗。
电路图三:
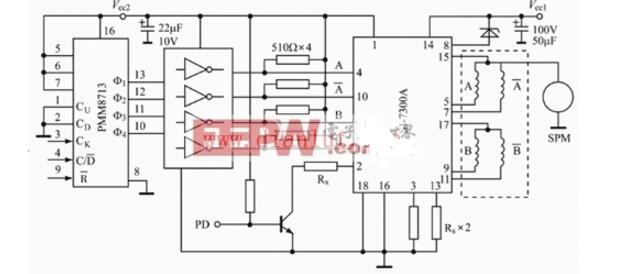
图4 四相步进电机功率驱动电路
LM331的输出频率和输入电压存在如下关系:f0=Vi/(IRt1RL),其中t1由外接的定时元件Rt和Ct决定,t1=1.1RtCt,IR由内部精密电流源提供,IR=1.9V/RS。故f0=ViRS/(2.09RtRLCt)。RS为可调电阻,它的作用是调整LM331的增益偏差。Ct为滤波电容,一般为 0.01~0.1μF,在滤波效果较好的情况下,可使用1μF的电容。为了提高精度和稳定度,组容元件选用低温度系数的器件。应用举例用PMM8713步进电机环形分配器与SI7300A步进电机功率放大器设计了一个四相步进电机功率驱动电路,PMM8713采取单脉冲输入、1-2相励磁方式,电路如图5所示。图中PD控制端为SI7300A的输入电流I0调节端,可悬空或接高电平,接高电平时可适当提高SI7300A的输出电流I0,在本应用系统中悬空使用。图中PMM8713的时钟脉冲输入信号由LM331(V/F)输出,方向控制信号和步进电机的起停信号由窗口比较电路给出。
电路图四:
介绍了BYG通用系列二相步进电机最常采用的的单极性和双极性2种驱动电路的设计,从原理上体现了二相步进电机的控制方法,增加了步进电机驱动电路设计的灵活性。二相步进电机的单极性和双极性2种驱动电路设计都采用了一片可在线编程的单片机AT89S52作为控制器,由达林顿功率管TIP142组成的电路作为驱动器,电路结构简单,设计思路清晰。
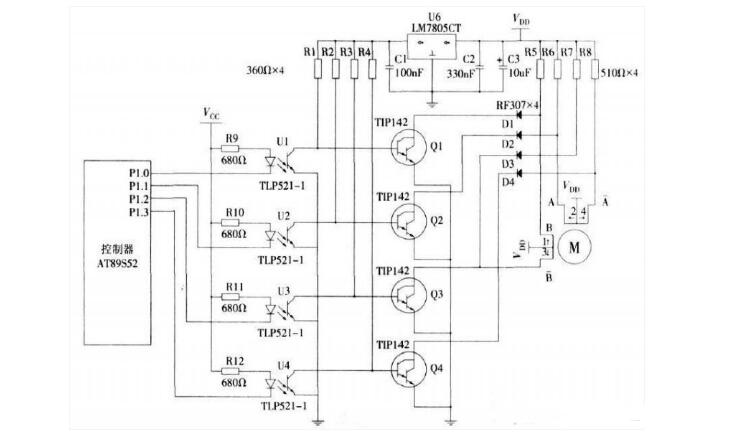
单极性驱动电路图
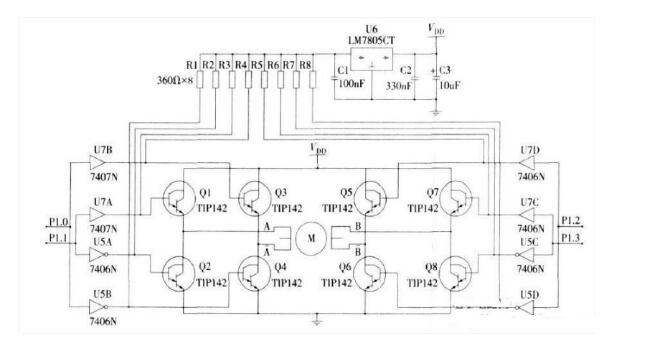
双极性驱动电路图
- 相关推荐
- 步进电机
-
51单片机与TA8435联接控制步进电机电路图2011-09-08 0
-
一份步进电机驱动器整机电路图2013-03-11 0
-
有刷电机与无刷电机的区别主要在哪些方面?2021-06-26 0
-
步进电机主要参数介绍2021-08-31 0
-
四相步进电机驱动程序2008-10-21 7161
-
互补步进电机控制电路图2009-04-09 957
-
51单片机驱动步进电机电路及程序2010-08-13 28050
-
MOTEC 公司的一款步进电机驱动器使用说明2017-09-18 1646
-
步进电机相序如何判断_步进电机主要在哪些方面应用2018-04-25 14401
-
步进电机有没有编码器?步进电机如何加编码器2018-04-25 53259
-
一文解析三相步进电机与两相步进电机得差距在哪里2018-04-25 48796
-
步进电机驱动芯片有哪些_六款步进电机驱动芯片2018-05-23 111546
-
步进电机驱动电路图大全(六款二相步进电机/三相反应式/LT2221驱动电路)2018-05-23 61008
-
二相步进电机与三相步进电机的区别2021-07-20 10611
-
步进电机主要有哪些分类?步进电机的主要构造是什么?2024-10-22 1690

全部0条评论
快来发表一下你的评论吧 !