

如何DIY火爆技术圈的Otto机器人?涂鸦低门槛教你学会社交圈流量密码
描述
一款叫 Otto 的桌面机器人成功引爆各个技术圈,外形迷你呆萌,功能丰富:既能做你的 AI 聊天搭子,又能跳迈克尔杰克逊的太空步,还可作为 STEM 教育工具,供儿童和编程新手快速入门,趣味十足、操控感极强。
更关键的在于 Otto 机器人是一个完全开源的 DIY 项目,硬件设计、代码和教程均公开,用户可以 3D 打印配件,并使用常见的电子元件(如显示屏、舵机等)即可进行灵活的组装,成本低廉、制作门槛超低。而在 AI 技术的加持下,Otto 机器人更是有望从“玩具级”工具升级为多场景智能设备,成为连接教育、娱乐与工业的桥梁。

(Otto 机器人主要电子元件)
涂鸦此次紧跟潮流,奉上这份超详细的 Otto 机器人 DIY 教程,结合 TuyaOpen 开发框架(点击查看TuyaOpen如何助力开发AI硬件),可让 Otto 机器人轻松接入 AI 大模型,开发者用语音或涂鸦赋能 App,即可对机器人进行 360 度的移动控制!
01
材料清单
以下是制作 Otto 机器人所需的硬件材料:
1、外壳
型号:Otto Robot 3D 打印机体外壳
购买渠道:闲鱼,大家可自行挑选任意喜欢的外壳造型
2、开发板
型号:T5 mini 开发板
购买方式:淘宝
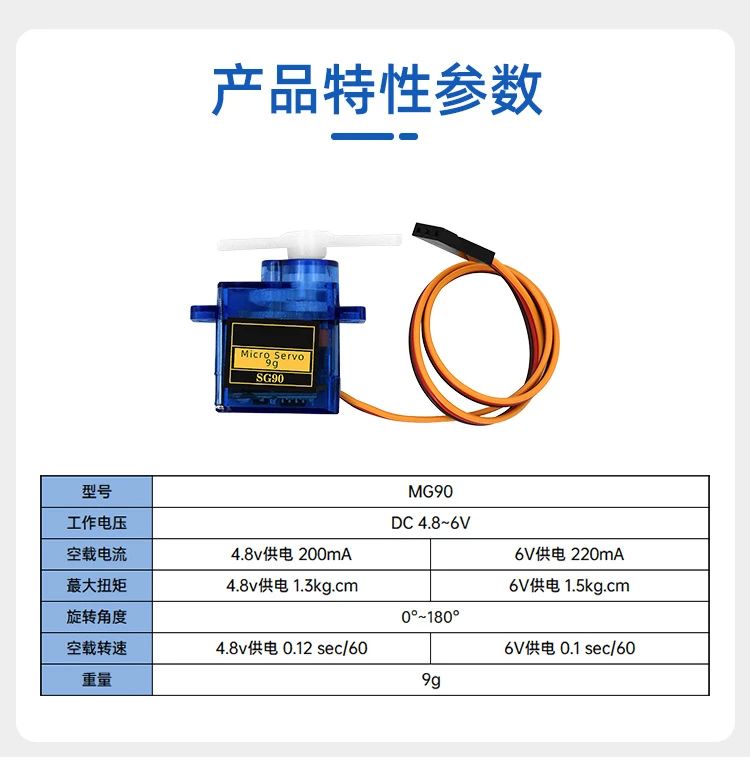
3、舵机
型号:SG90 180 度舵机
购买渠道:淘宝
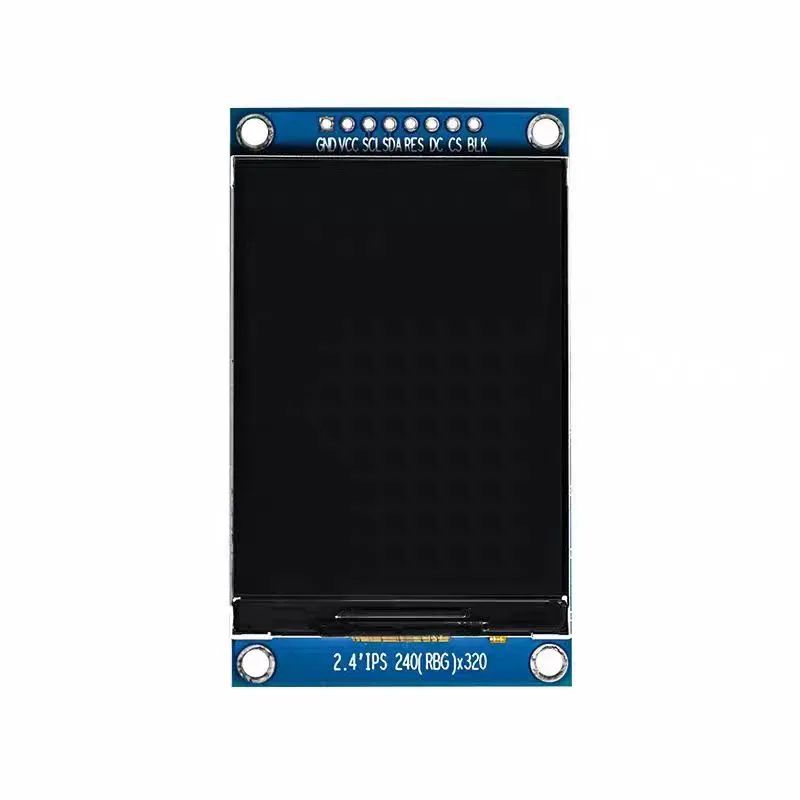
4、显示屏
型号:ST7789
购买渠道:淘宝
02
硬件接线图
Otto 机器人的核心功能依赖于精确的硬件连接,下方是接线示意图:

03
软件设计
1、代码下载
1.1 GitHub 仓库:Otto Robot Demo
https://github.com/tuya/TuyaOpen/tree/master/apps/tuya.ai/your_otto_robot
1.2 主仓库:TuyaOpen
https://github.com/tuya/TuyaOpen
2、了解 TuyaOpen 开发文档
TuyaOpen 开发文档:https://tuyaopen.ai/docs/about-tuyaopen/
3、修改配置
PID 修改方式:在下方文件中,将 PID 修改为 pnax3fya1ctl5pst
具体文件--apps/tuya.ai/your_otto_robot/include/tuya_config.h
获取 UUID:访问 TuyaOpen 仓库,点击右上角“Star”后,扫码进涂鸦 AI 开发群找群主获取 UUID 授权码,免费名额有限,先到先得!
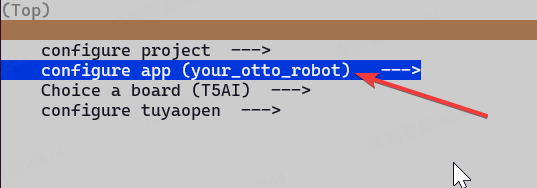
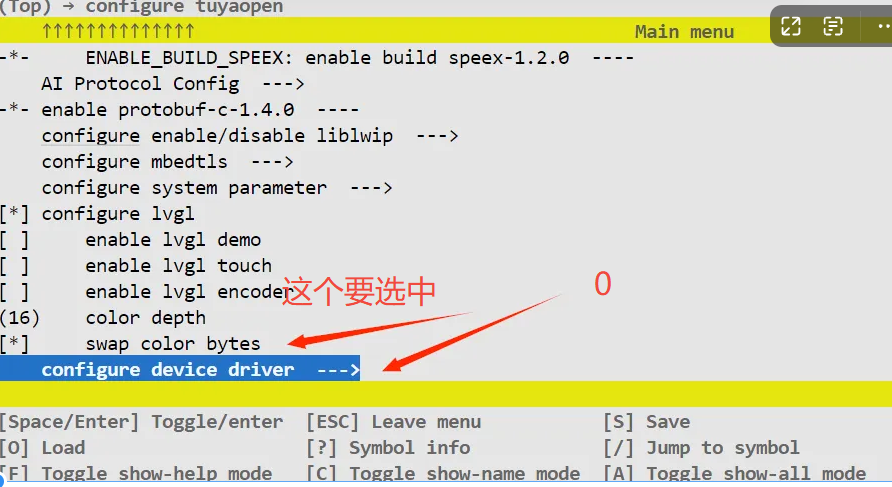
配置 T5 mini 开发板引脚:
在 apps/tuya.ai/your_otto_robot/ 使用命令:tos menuconfig,具体按下图操作选择:
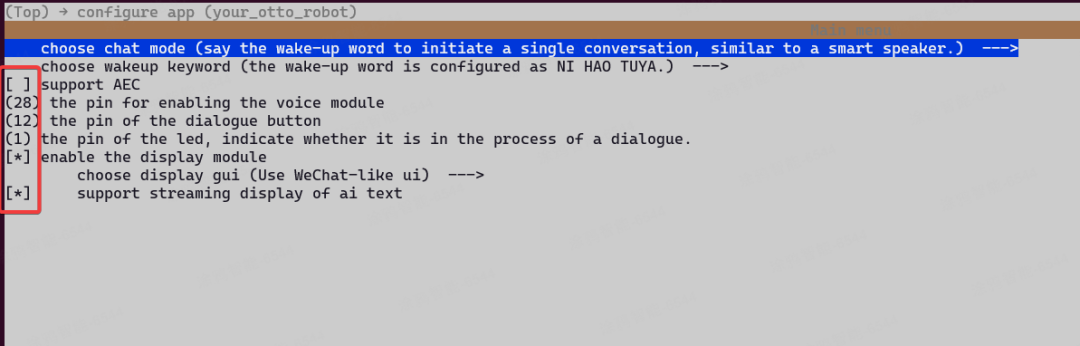
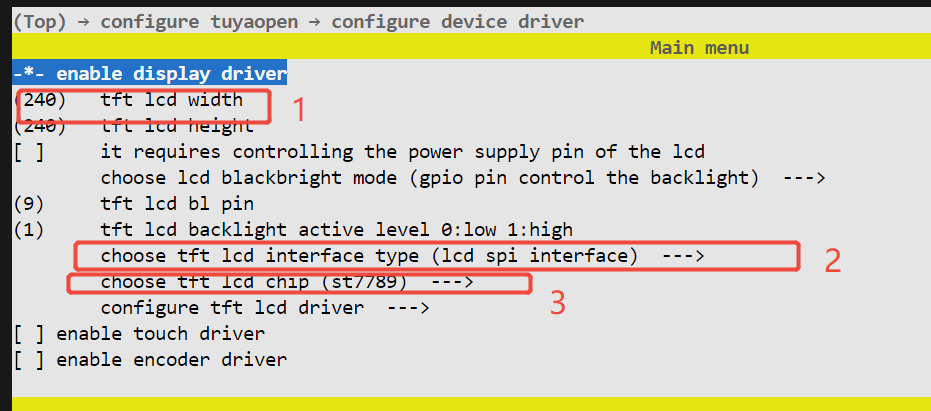
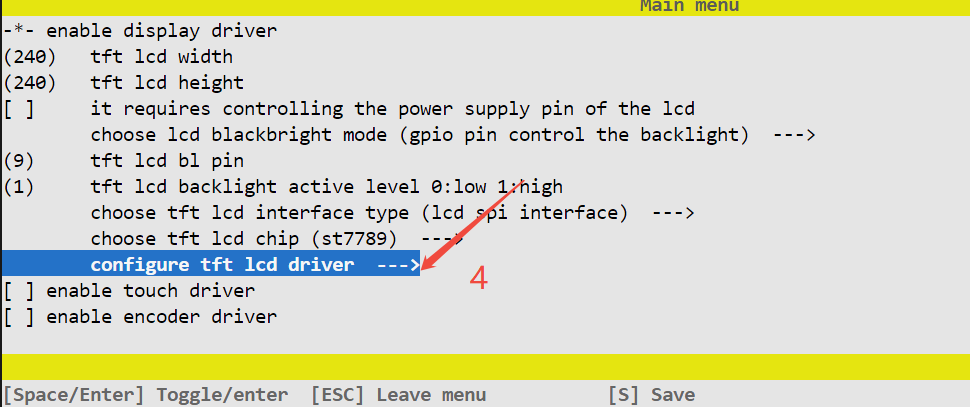
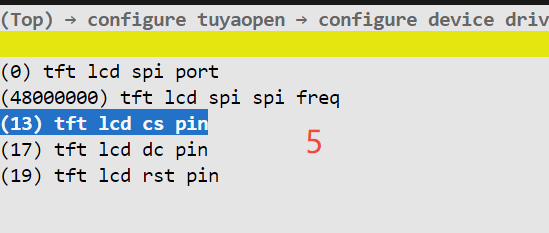
选择 st7789 屏幕:
在 apps/tuya.ai/your_otto_robot/ 使用命令 tos menuconfig ,然后按下方几个步骤操作,完成配置后保存,再进行 tos build。
编译完成后才会下拉 platform/T5AI/tuyaos/tuyaos_adapter/src/driver/tkl_pwm.c 文件,记得修改 tpwm_chan_t ty_to_bk_pwm(TUYA_PWM_NUM_E ch_id) 接口里面的 PWM 映射表,然后再次编译 tos build:
pwm_chan_t ty_to_bk_pwm(TUYA_PWM_NUM_E ch_id){ pwm_chan_t pwm = PWM_ID_MAX; switch(ch_id) { case TUYA_PWM_NUM_0: pwm = PWM_ID_0; break; case TUYA_PWM_NUM_1: pwm = PWM_ID_4; break; case TUYA_PWM_NUM_2: pwm = PWM_ID_3;//改这行 break; case TUYA_PWM_NUM_3: pwm = PWM_ID_8; break; case TUYA_PWM_NUM_4: pwm = PWM_ID_10; break; default: break; }
return pwm;}
<左右滑动查看更多>
04
固件烧录指南
1、烧录准备(可参考第二大点:硬件接线图)
下载最新版本的固件 .bin 文件
下载烧录工具,或在 Linux 环境下使用 tos 命令
使用 Type-C 数据线连接 T5 Mini 开发板
2、烧录步骤
打开烧录工具
选择正确的 COM 端口
设置芯片类型为 T5
烧录地址设置为 0x0
选择下载的固件文件
点击“Start”开始烧录
05
确认控制效果
1、AI 运动控制
下载涂鸦智能 App
在 App 右上角添加子设备,选择“机器人”类目
进入控制界面,即可通过 App 控制机器人,实现前后左右的移动
2、AI 语音聊天
用户可以使用语音唤醒聊天,并控制 Otto 机器人进行前后左右移动,或跳太空步等舞蹈动作。

【注】默认唤醒词为“你好,涂鸦”,用户也可以在涂鸦智能 App 中设定自己想要的专属唤醒词。
3. 其他功能
屏幕显示语音对话+状态信息
未来将会支持视频识别,用 AI+IPC 实现多模态能力,包括:情绪识别、人+物识别,并具备强大的 AI 视觉学习能力
06
致谢
1、本项目感谢以下开源作者的支持:
[txp666]
2、本项目感谢以下开源项目的支持:
OttoDIYLib
3、本项目感谢以下开源社区的支持:
JLCEDA
祝大家都能成功打造属于自己的
智能 Otto 机器人!
-
涂鸦教你打造火爆社交圈的如厕小应用,代码开源支持二开2024-04-30 1260
-
Otto DIY Arduino蓝牙机器人易于3D打印2023-07-06 1024
-
如何编程Otto DIY机器人以使其行走2023-06-28 1421
-
KUKA机器人密码介绍2023-05-19 11551
-
DIY一个机器人套件2022-08-03 1847
-
音圈模组加持的AI烹饪机器人2021-11-30 1404
-
配送机器人圈这两款新品或于2020年量产2019-08-23 3477
-
币圈熊市之下如何进行投资?炒币机器人币小秘为你答疑2018-06-30 3207
-
DIY系列之:国外牛人教你快速打造首台机器人(图)2017-01-19 1571
-
机器人,arduino,DIY2016-09-06 6061
-
欢迎您加入医疗电子技术圈!2015-07-07 2025
-
DIY机器人_机器人制作教程_最全机器人DIY大全2015-06-05 70855
-
简易机器人DIY——常用工具篇2015-03-06 11848
-
DIY机器人2012-08-15 13539
全部0条评论

快来发表一下你的评论吧 !
