

RK3562开发板uboot下GPIO的控制方法,触觉智能嵌入式方案商
描述
本文介绍如何uboot下GPIO的控制方法等,使用触觉智能RK3562开发板演示,搭载4核A53处理器,主频高达2.0GHz;内置独立1Tops算力NPU,可应用于物联网网关、平板电脑、智能家居、教育电子、工业显示与控制等行业。
添加uboot配置选项
命令如下:
# 进入sdk目录 $ cd rk3562_linux # 用文本编辑器打开uboot配置信息 rk3562_linux$ vi ./u-boot/configs/rk3562_defconfig
在rk3562_defconfig
配置文件末尾,加入以下配置信息:
CONFIG_CMD_GPIO=y
编译uboot,并将编译生成的
uboot.img
通过烧录工具烧录进开发板的指定地址
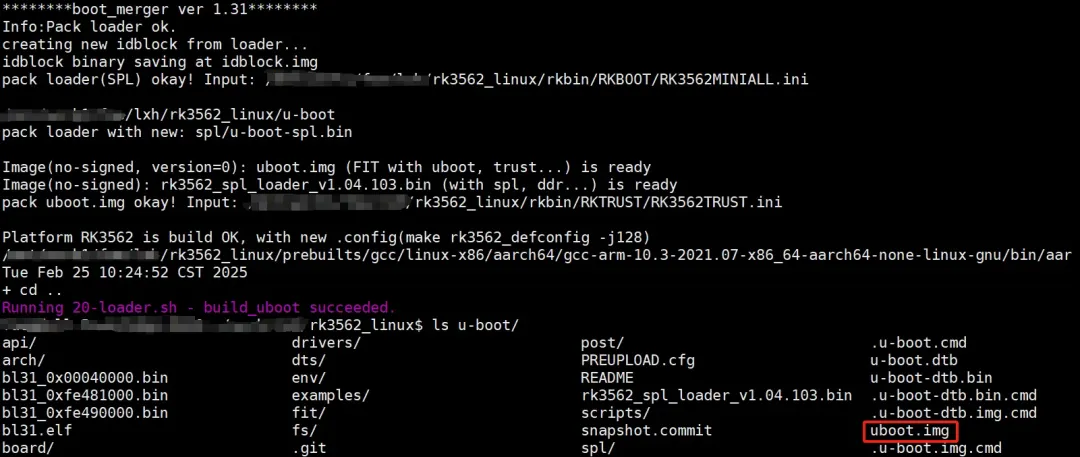
# 编译uboot rk3562_linux$ ./build.sh uboot
编译生成的
uboot.img
文件会在sdk的
./u-boot
目录下:
单独烧录
uboot.img
到开发板上。
uboot命令行验证GPIO
开发板上电之后,连续按下ctrl+c可使开发板进入uboot命令行,进入uboot命令行输入gpio,如果有打印以下用法则说明gpio控制方法配置成功:
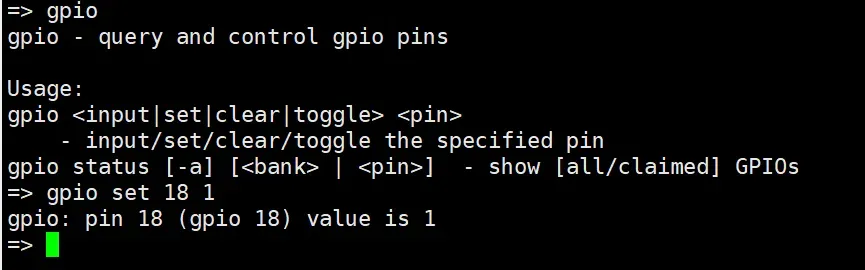
通过在uboot命令行输入以下命令可控制gpio引脚的输出(只是设置高低电平,不会占用),然后执行
boot
进入系统开机验证。
# 将gpio18号引脚使能为输出高电平 => gpio set 18 1 => boot
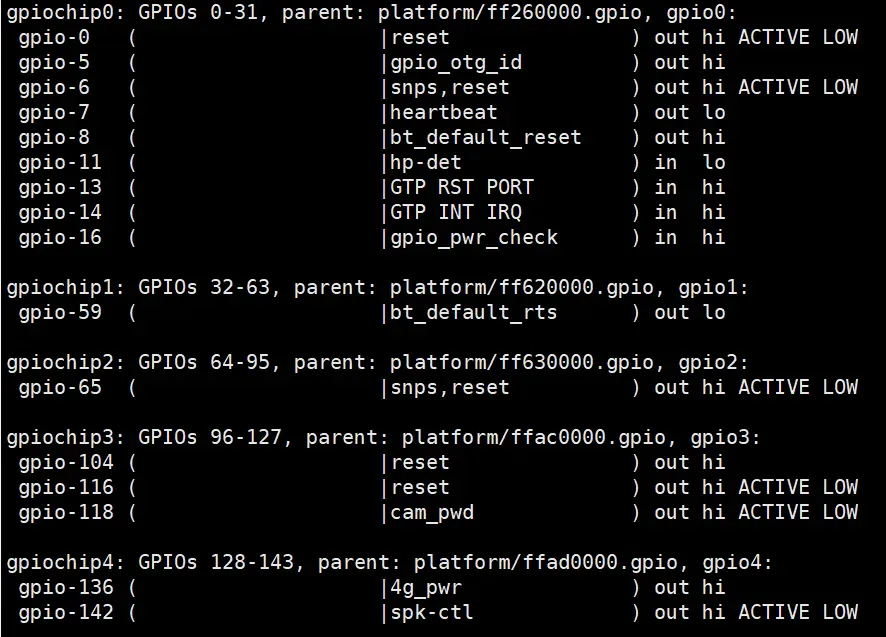
注意:控制gpio输出引脚之前得先确保gpio不被占用,可通过
cat /sys/kernel/debug/gpio
查看,显示的都是已经使用的gpio下。
实现上电自动配置gpio
修改sdk目录下的./u-boot/common/autoboot.c
# 进入sdk目录 $ cd rk3562_linux # 通过文本编辑器打开autoboot.c文件 rk3562_linux$ vi ./u-boot/common/autoboot.c
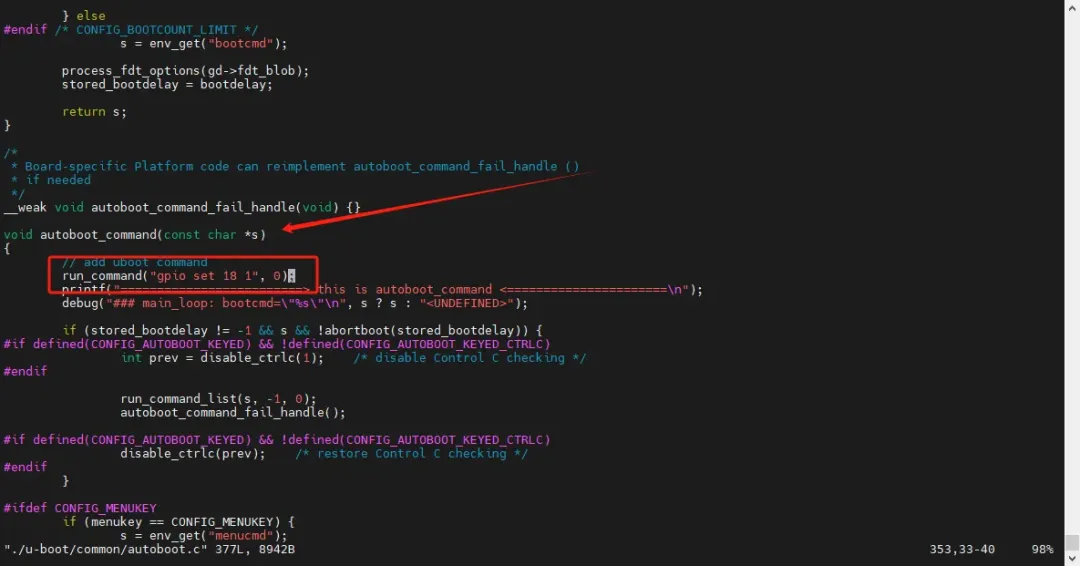
在autoboot.c中找到void autoboot_command(const char *s)这个函数,在函数中添加执行run_command("gpio set 18 1",0);run_command("gpio set 18 1",0);函数中有两个参数,第一个是在uboot命令行执行的命令,第二个flag默认写0就可以,如图所示:
修改完重新编译烧录uboot。
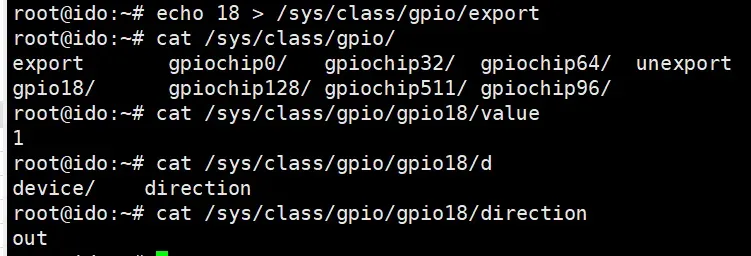
最后上板验证:
$ echo 18 > /sys/class/gpio/export $ cat /sys/class/gpio/gpio18/direction $ cat /sys/class/gpio/gpio18/value
-
新一代低价开发板芯片RK3562来啦! — 触觉智能RK3562开发板2024-08-15 6157
-
瑞芯微RK3588开发板Linux系统添加自启动命令的方法,深圳触觉智能Arm嵌入式鸿蒙硬件方案商2024-09-19 3352
-
Linux系统挂载exfat格式U盘教程,触觉智能RK3562开发板演示2024-12-10 1672
-
瑞芯微主板/开发板Linux系统播放音频方法,触觉智能RK3562开发板演示2024-12-13 1912
-
瑞芯微平台Android系统串口测试方法,触觉智能RK3562开发板演示2024-12-24 2061
-
嵌入式开发必备-RK3562演示Linux常用系统查询命令(上)触觉智能出品2024-12-31 117
-
嵌入式开发必备-RK3562演示Linux常用系统查询命令(下)2025-01-03 1327
-
Linux系统更换开机logo方法教程,触觉智能RK3562开发板演示2025-01-06 1868
-
Linux文件系统打包及镜像制作,触觉智能RK3562开发板演示2025-04-28 1341
-
触觉智能RK3562开发板新版强势亮相2025-05-30 1603
-
告别烧固件,RK3562开发板Android系统屏幕方向临时设置小妙招2025-07-11 1191
-
性能与性价比兼得!迅为RK3562开发板开启嵌入式开发新选择2025-12-23 2070
-
拒绝卡顿,触觉智能RK3562核心板成功实现2秒级疾速启动,响应快到离谱!2026-01-16 873
-
触觉智能出品,瑞芯微RK3562开发板配置USB复合设备(上)2026-05-26 177
-
触觉智能RK3562开发板配置USB复合设备(下)2026-06-08 347
全部0条评论

快来发表一下你的评论吧 !
