

Modbus TCP 转Canopen网关连接台达伺服驱动器的配置案例
描述
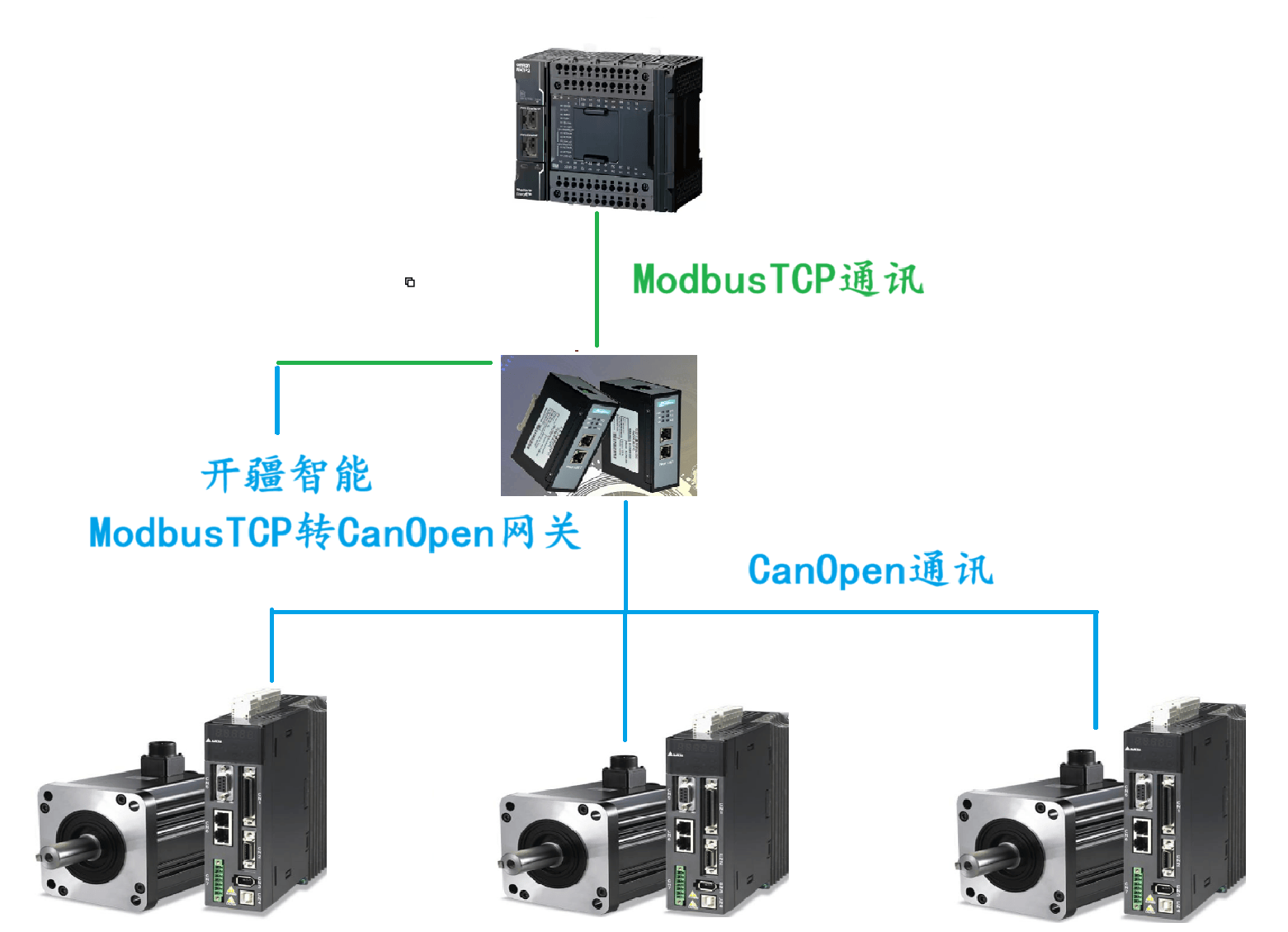
本案例是使用欧姆龙PLC通过开疆智能ModbusTCP转Canopen网关连接台达A2伺服驱动器的配置案例。
配置过程:
首先打开PLC组态软件“Sysmac Studio”,新建项目并进行配置。
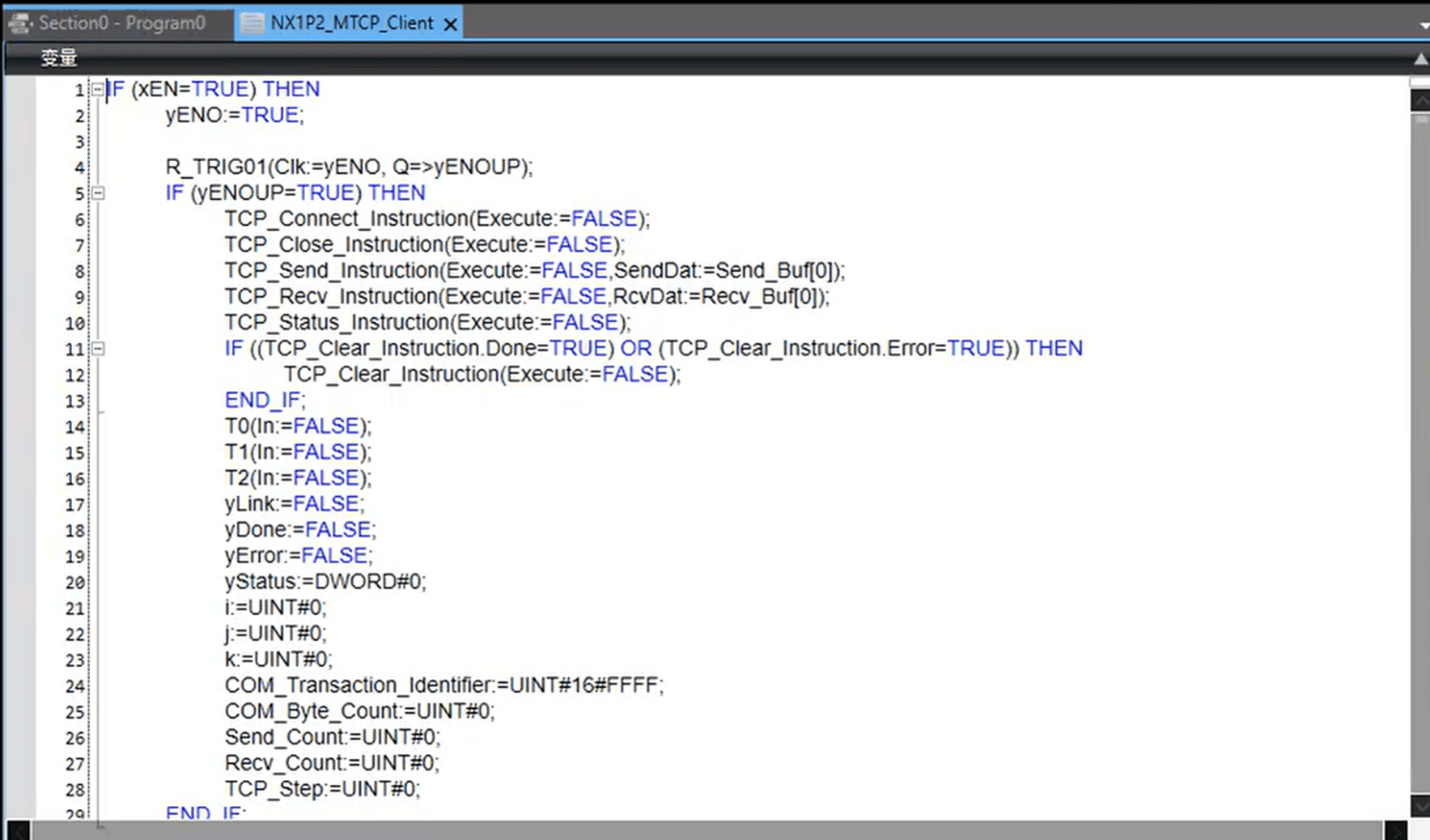
编写ModbusTCP的通讯程序。
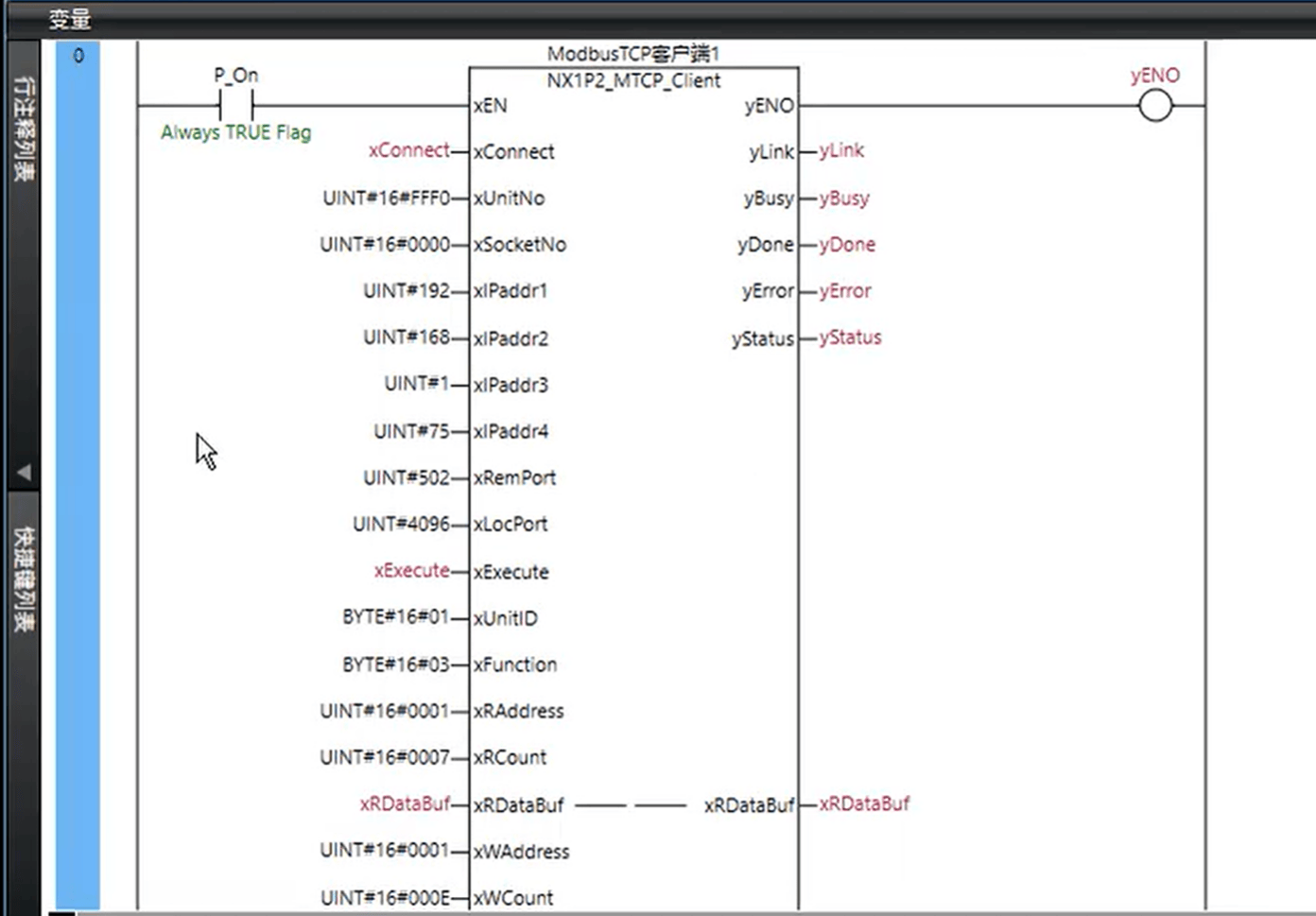
设置连接的IP地址,端口号等参数。
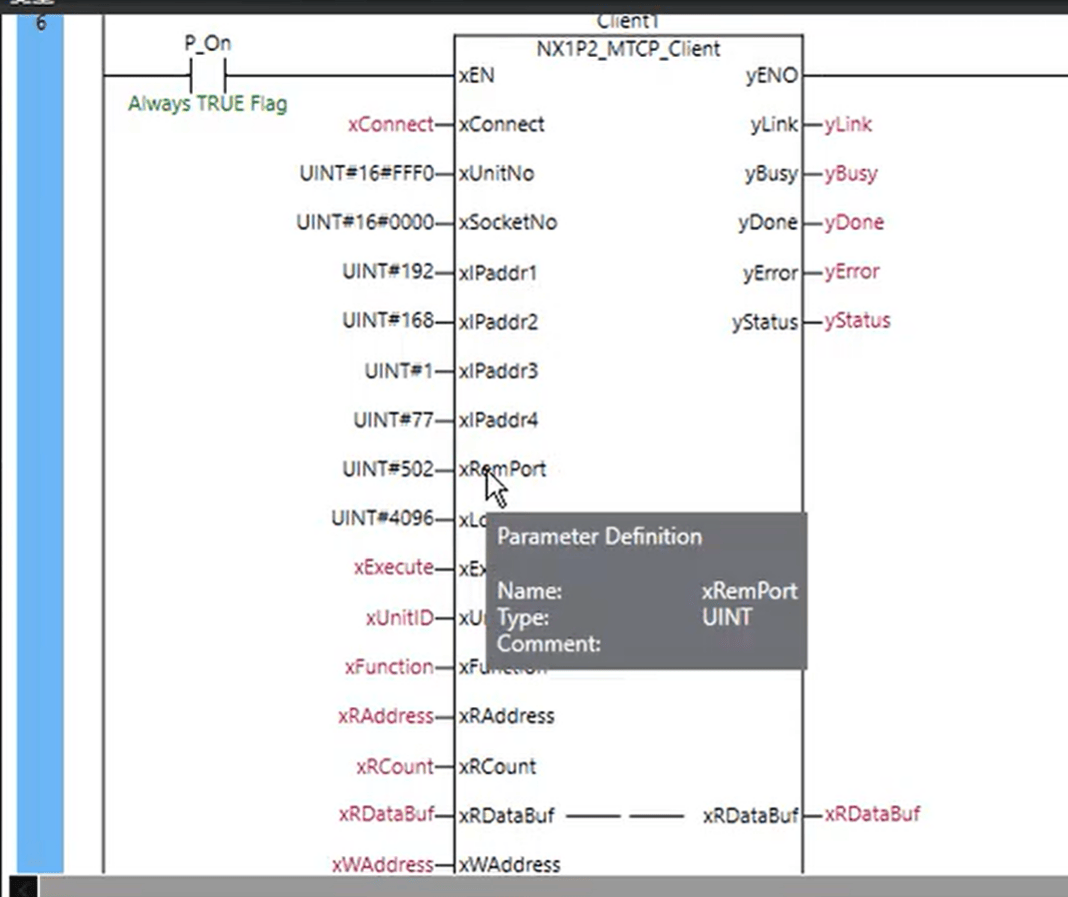
设置ModbusTCP的参数,(读写寄存器地址,数量等参数)
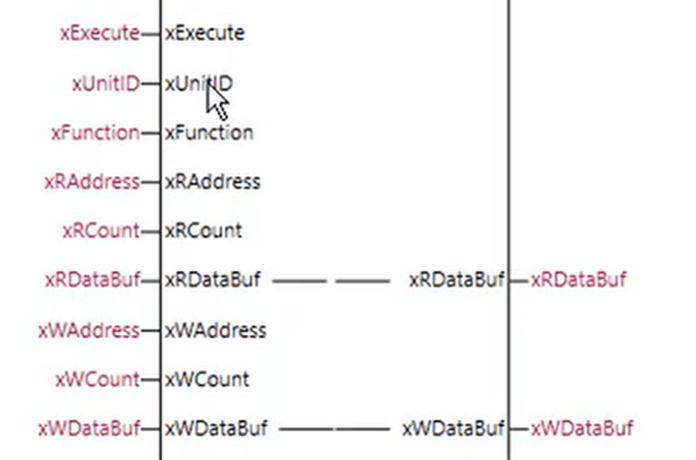
具体可对照ModbusTCP功能块手册
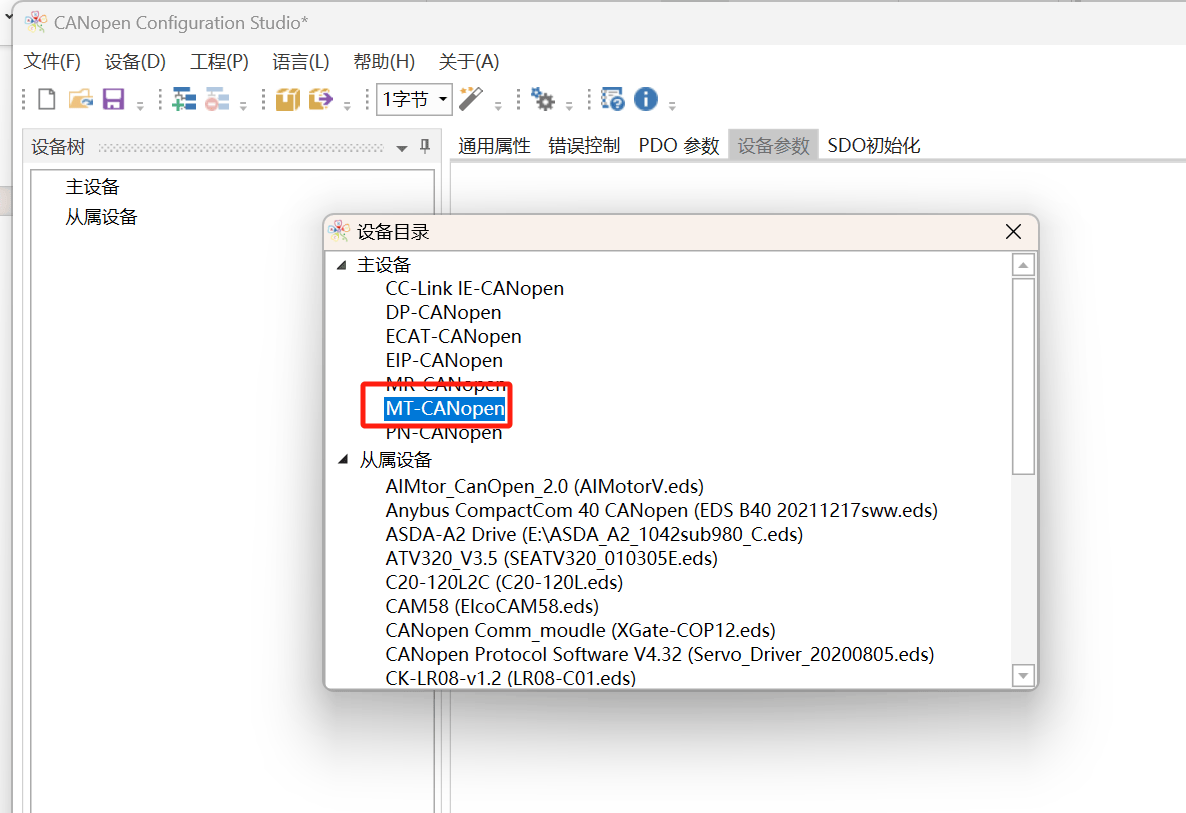
完成PLC一侧ModbusTCP客户端的配置后,打开网关配置软件“CANopen Configuration Studio”
新建项目,设备选择MT-Canopen
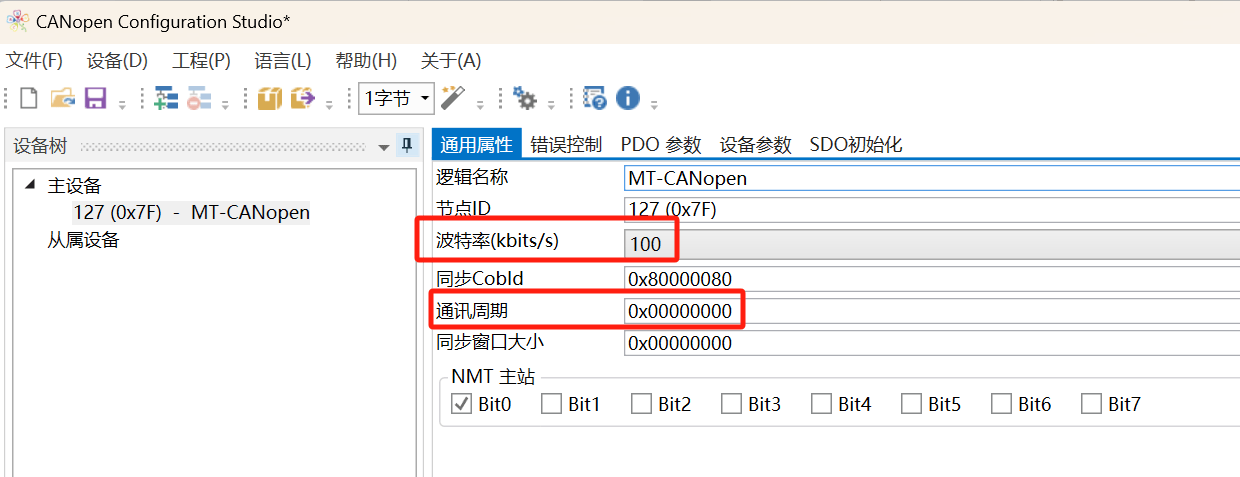
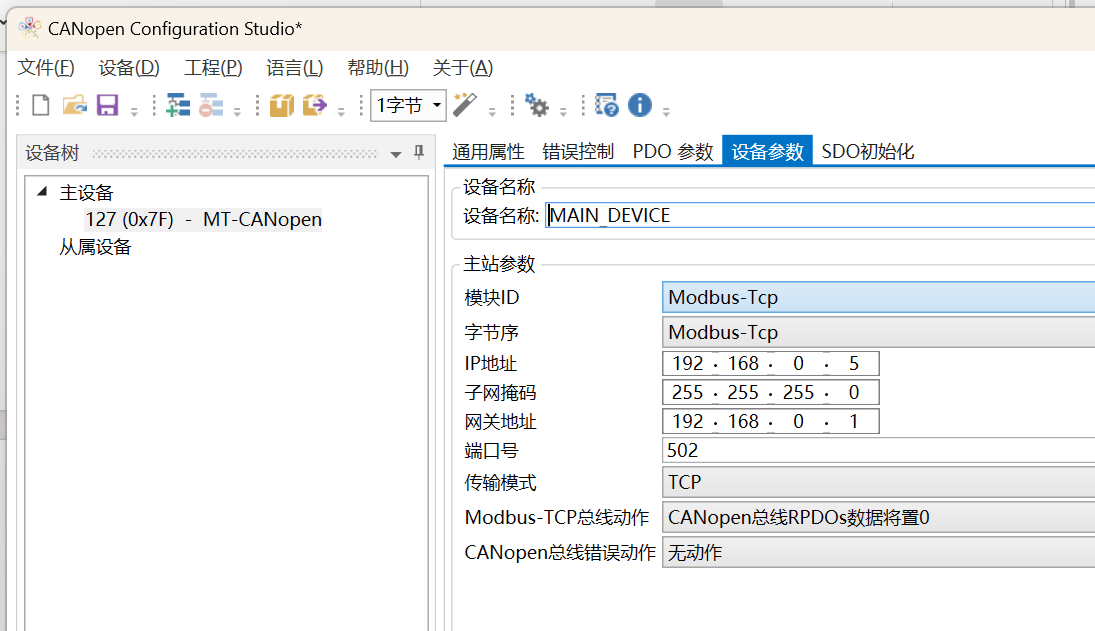
设置Canopen设备的波特率,周期时间等参数
设置网关的ModbusTCP地址,以及掉线后的数据处理方式。
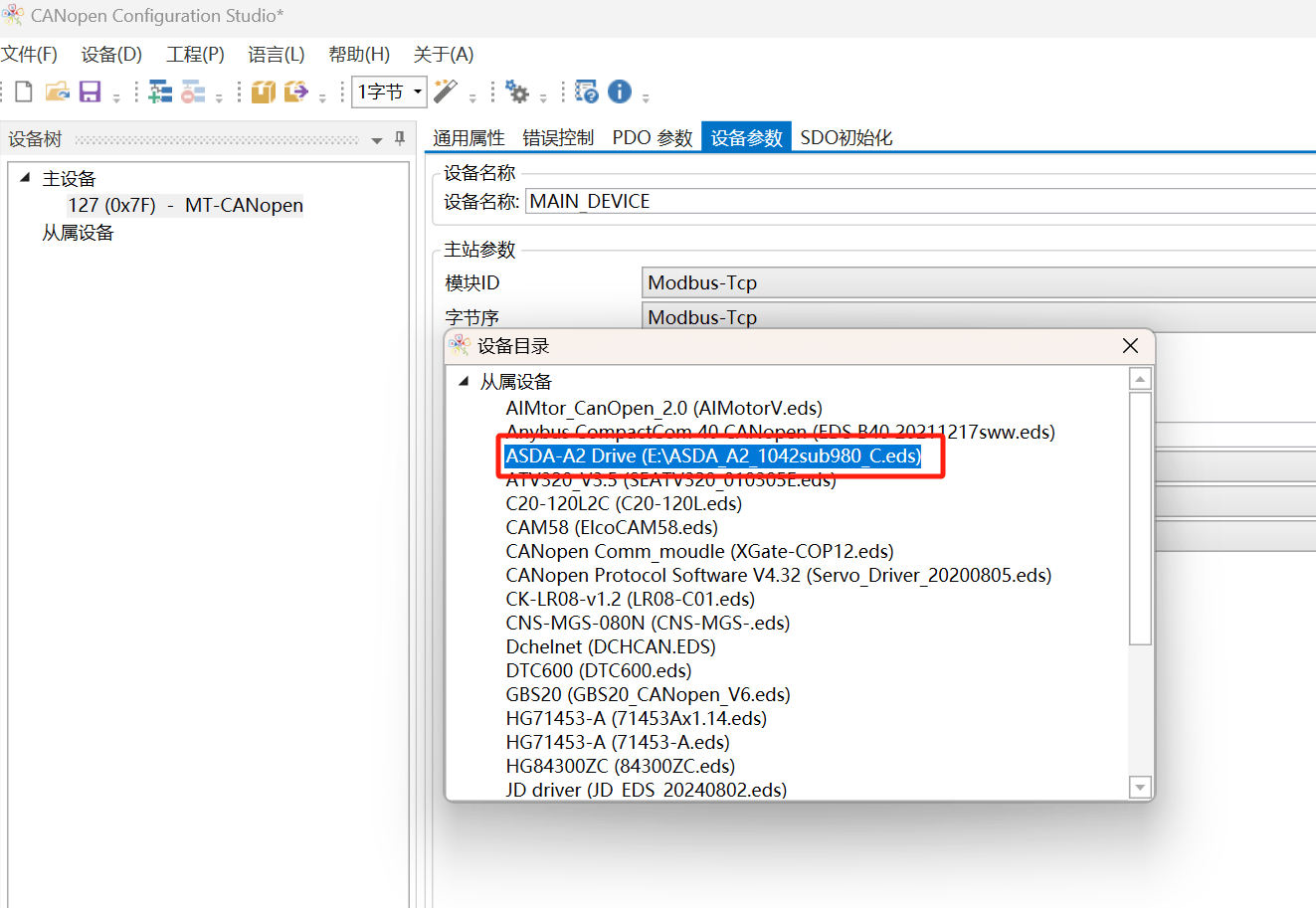
添加从站EDS文件
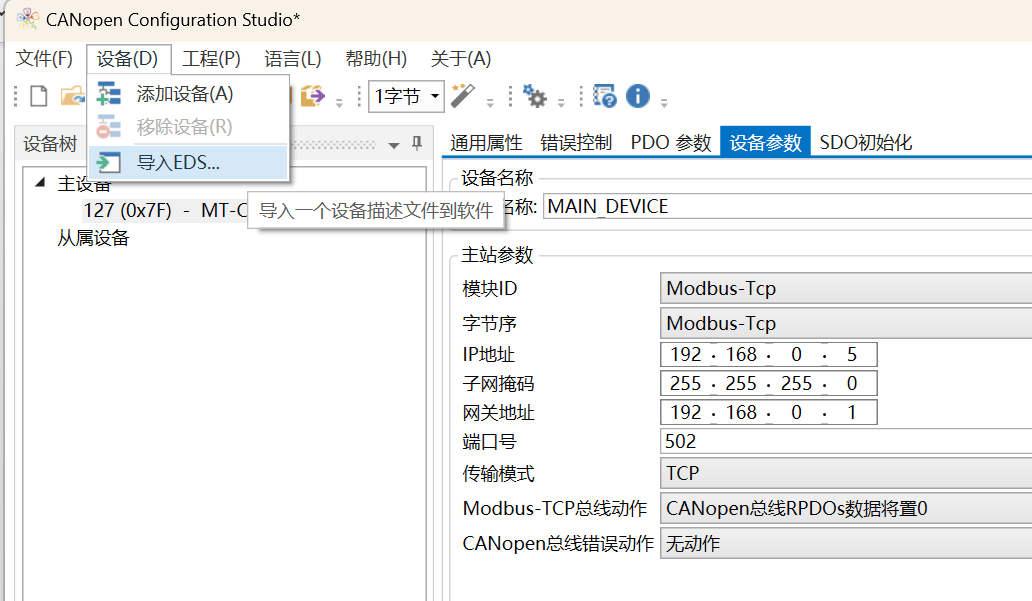
导入后添加从站设备
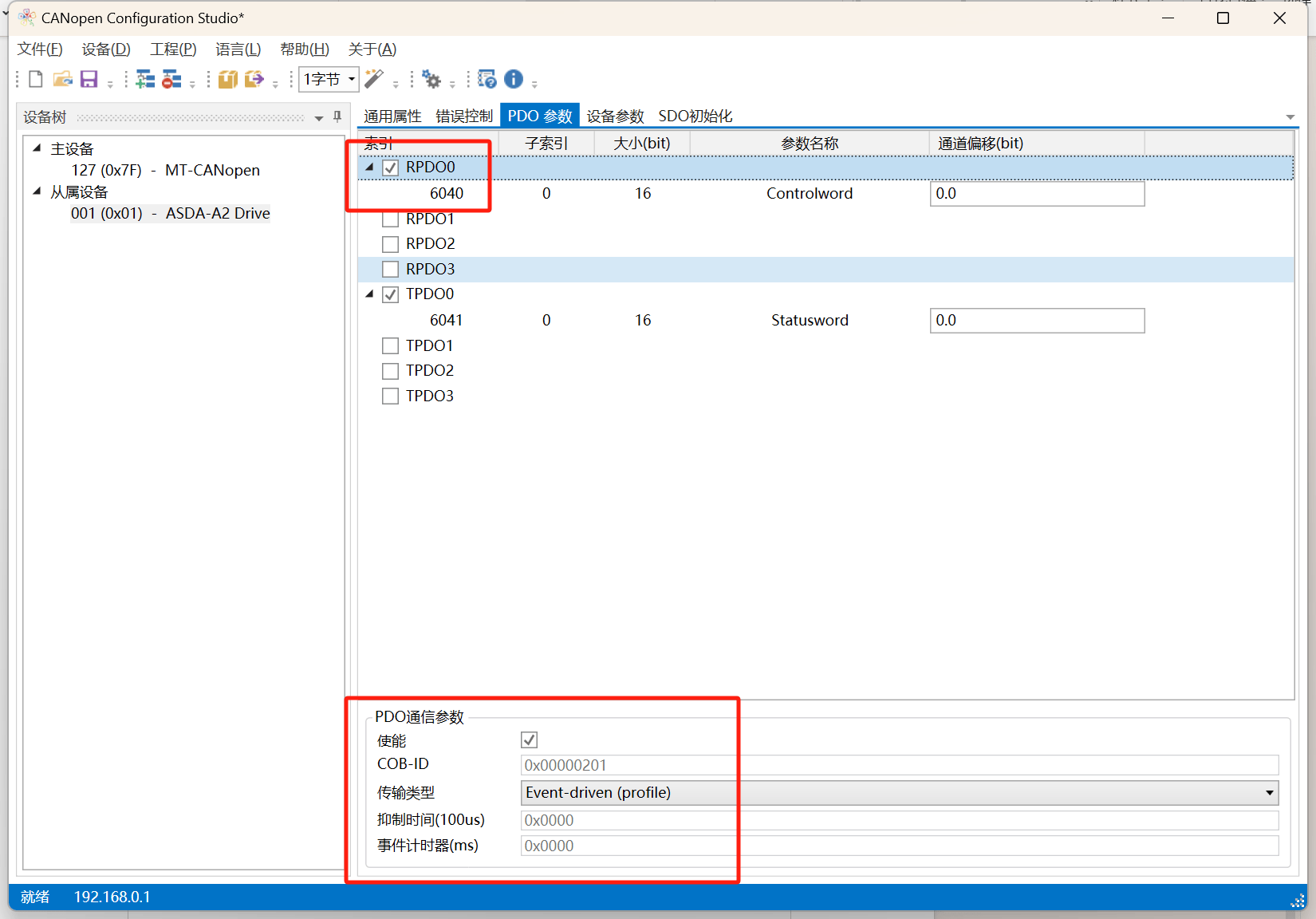
添加PDO参数并设置PDO参数如传输类型及传输方式等
确认无误后将配置下载进网关,之后将全部设备重新上电,当网关指示灯正常后即代表设备正常通讯可进行读写。
审核编辑 黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
开疆智能CCLinkIE转Canopen网关连接台达伺服驱动器配置案例2025-06-30 802
-
通过CANopen转Modbus TCP网关的伺服系统2024-01-02 1544
-
通过MODBUS转PROFINET(PROFINET转MODBUS)网关连接EP1C系列通用伺服驱动器2023-10-24 1936
-
CanOpen转Profinet网关连接SD100伺服驱动器与PLC配置案例2023-09-01 682
-
配置案例-CanOpen转Profinet网关连接SD100伺服驱动器2023-08-31 1657
-
PLC通过Modbus 485转Profinet网关连接日鼎伺服驱动器2023-05-18 698
-
PLC通过Modbus 485转Profinet网关连接日鼎伺服驱动器配置案例2023-05-10 2398
-
Profinet转Canopen网关连接MOTEC伺服配置案例2023-04-15 1912
-
Modbus TCP转Profinet网关连接电机驱动器快速配置2022-10-24 3738
-
配置案例ModbusTCP转Profinet连接拧紧轴驱动器2022-08-15 3805
-
ModbusTCP转Profinet网关连接拧紧轴驱动器配置2022-08-09 1806
-
求CANOpen转PROFINET网关连接东元伺服驱动器配置案例2021-11-15 1786
全部0条评论

快来发表一下你的评论吧 !
