

电机控制系统 - 波特图和稳定性
描述
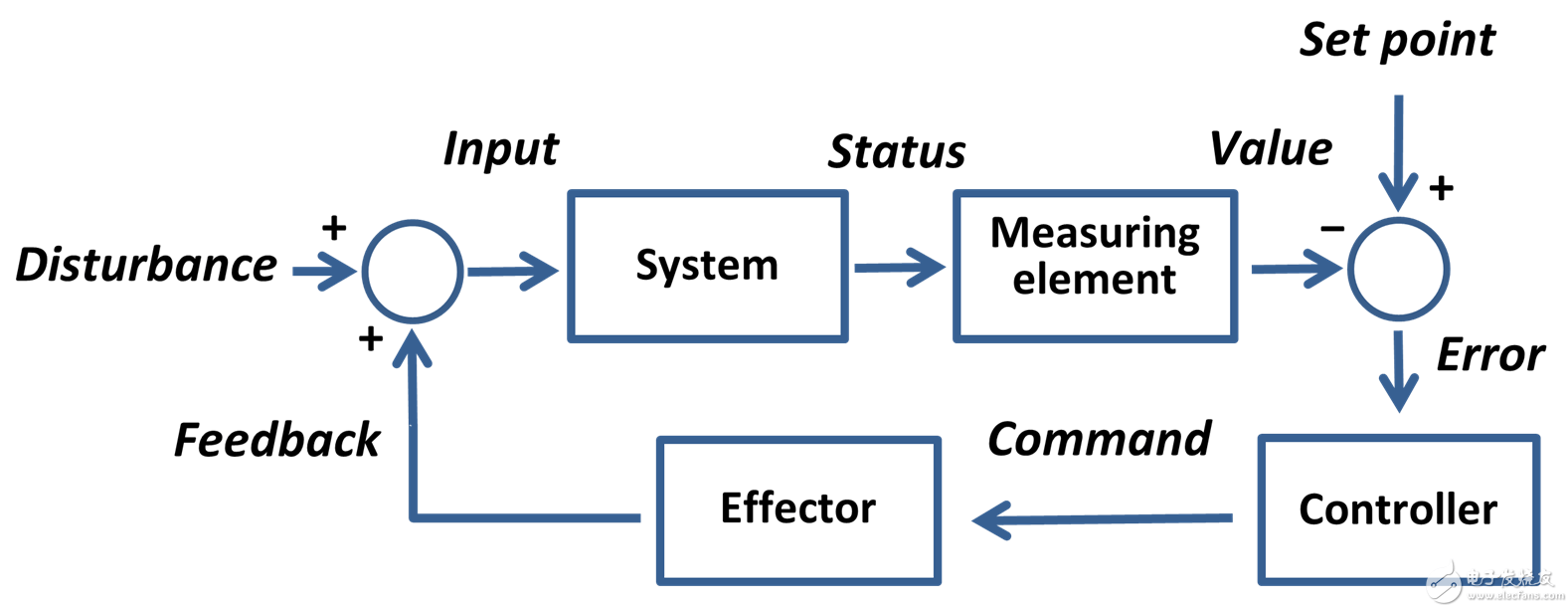
什么是控制系统?控制系统将其系统的未来状态改变为更理想的结果。我们经常使用反馈控制系统(也称为闭环控制),将命令的结果反馈到控制系统。特别是我们正在寻找命令与所需响应之间的错误。如果输出状态没有反馈到控制系统中,则称为开环系统。
我最近在关于调整电机和理解波特图的机器人论坛的机器人上有一个问题。许多电机控制软件包都带有调谐工具,可以执行诸如生成波特图等事情。这篇文章主要是我对这个问题的回答的一个副本。
通过观察电机的运动,系统的频率可能难以可视化。系统的频率是当你转换时域信号(即你看电机运动随着时间的推移),并使用傅里叶变换将其转换到频域。一旦将信号转换为频域,我们可以使用波德图。波德图帮助我们可视化控制系统响应的(传递函数)以验证其稳定性。
随机注:
假设您知道传递函数,在开环系统中,您可以使用根发现(即查找使方程等于0的值)来检查稳定性(通过确保所有根都是负实际值) 。对于基于反馈的闭环系统,我们可以修改上述内容并用计算机解决(因为数学很难),或者使用Bode图帮助更好地理解控制系统。(我还应该指出,你可以使用Routh-Hurwitz来避免复杂的数学,这将需要另一个职位......)
一般情况下,波特图显示输入控制信号的相位和增益(幅度),直到它到达频域的输出(指令)。
波德图的部分
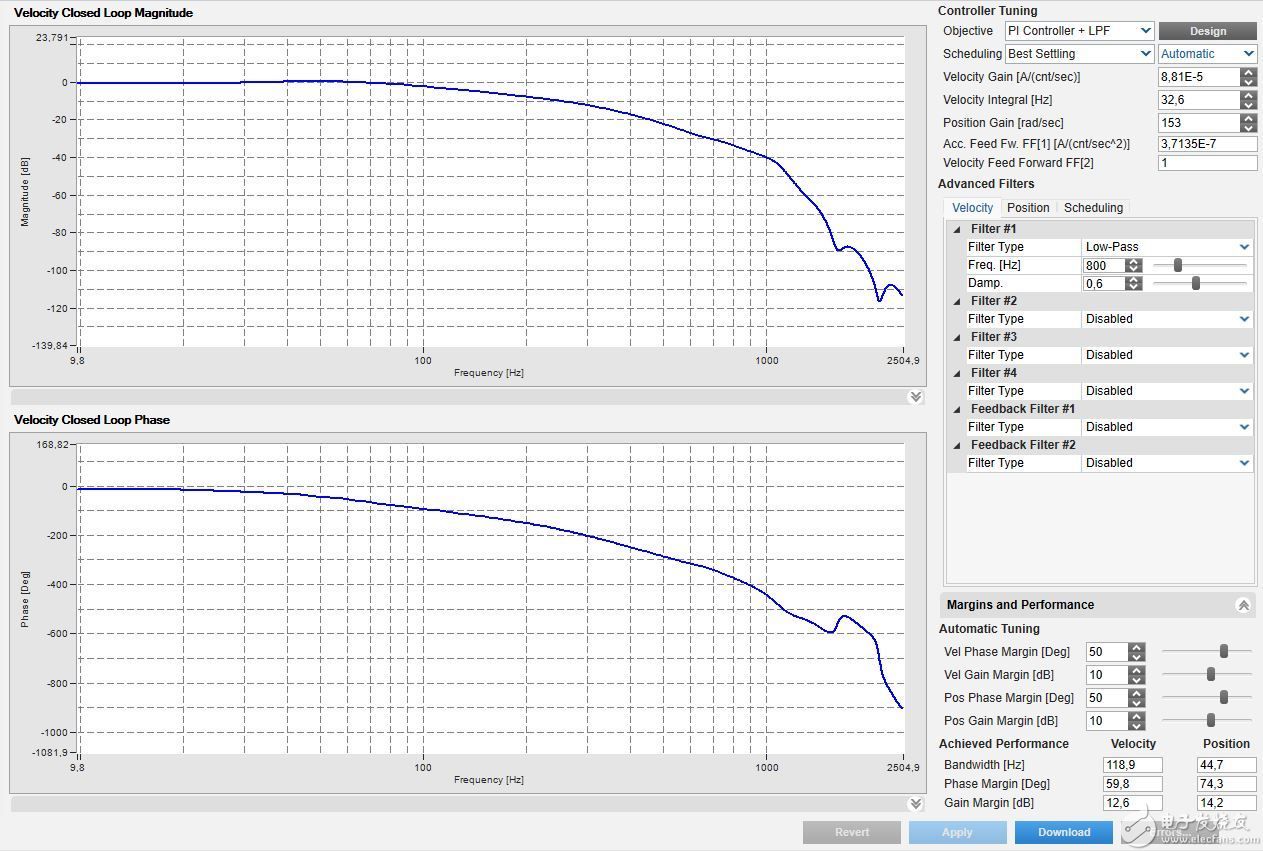
增益是输入信号和最终命令之间的值变化。如果你的系统没有增益也没有损失,那么你将得到一条0dB增益的直线水平线。您通常会在幅度图的右侧看到增益下降(减少)。
直到它开始下降的频率范围越大,表明系统在更多条件下会保持稳定。主曲线中的随机颠簸和曲线通常是不稳定的迹象。如果增益增加到无穷大(即大数值),这往往是不稳定的迹象,并且您需要重新考虑控制器设置!如果您有增益尖峰,请参阅下面的过滤部分。
快速提醒:从原始时域信号幅度获得以dB为单位的增益:
带宽是曲线顶部的区域,直到幅度降低-3dB。所以在上面的图片中,您可以看到曲线在100Hz左右下降。所以你的系统的带宽大约是100Hz。该工具实际上在图像右下方的框中显示了118.9Hz的精确带宽值。控制过去118.9Hz将会缓慢或无响应。
阶段描述了输入信号和输出命令之间的时间偏移。360阶段是单周期。所以如果你有一个1KHz(即1000Hz)的指令信号,图表中的每个360度将代表1/1000秒(转换频率到时间)或1毫秒。您可以在相图中看到,一旦超过带宽,所需的输入信号将传输到输出信号需要更长的时间。
过滤特定频率
各种滤波器(低通,陷波等)通常用于消除特定频率的谐振。例如,如果您旋转电机,并且您在特定频率看到事情开始剧烈震动,则可以添加一个滤波器,以便在该频率下增益得以降低。一般来说,您应该调整一个没有过滤器的电机,并且只在需要时添加过滤器。
验证控制参数
通过查看输出波形,可以验证选定的增益是否良好(在时域中); 这有时被称为示波器模式。如果在运动开始时有很多初始振铃(不断变化)或过冲,您的收益可能会很高。如果初始命令正在慢慢达到所需的输出,则可能需要增加增益。
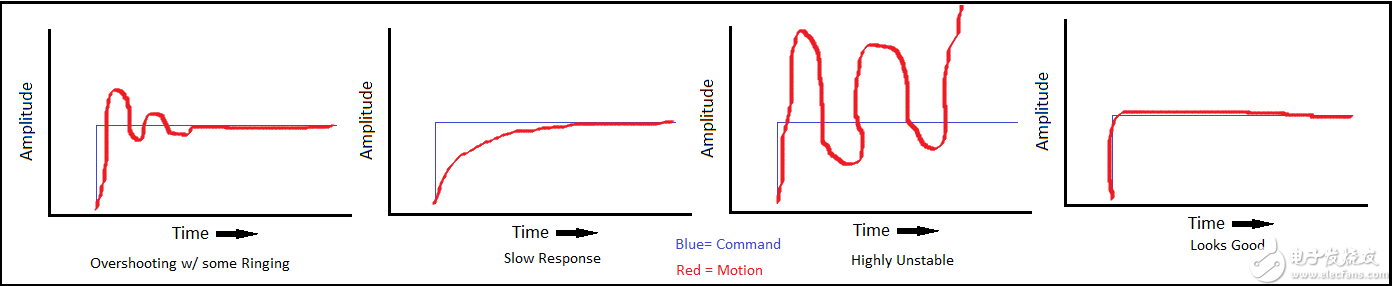
显示常见调整问题的曲线,然后是良好的响应曲线。蓝线是命令,红线是实际的电机输出。
在上图中,我们可以看到:
1.输出运动超调,伴随着一个小信号响应,因为它稳定到命令。有点超调通常很好,但我们尽可能减少过冲,同时还有一个响应系统。
2.输出响应慢。我们可能想要一个更快的响应,这样系统就不会很慢了。当你让系统不那么慢时,你经常会增加过冲和潜在的不稳定性。
3.高度不稳定。从一堆振荡开始,然后是大量的指令输出。我们想要避免这一点!
最后,这个最右边的情节看起来不错。电机输出直接位于指令运动的顶部,有一个非常轻微的过冲(如果你看起来很近)。
- 相关推荐
- 热点推荐
- 电机控制
-
双电机分布式驱动汽车高速稳定性机电耦合控制2025-06-18 374
-
如何运用波特图的力量来确保电路稳定性2023-01-04 5410
-
传统汽车的稳定性控制系统是怎样工作的?2021-08-30 1510
-
永磁电机控制稳定性问题如何分析2021-02-08 2403
-
电机控制系统 - 波德图和稳定性2018-07-25 4858
-
电机控制系统——伯德图和稳定性2017-10-09 3315
-
控制系统的稳定性标准的相关知识2014-08-26 5006
-
控制系统的稳定性2013-04-10 2020
-
跟随伺服控制系统的输入状态稳定性2011-05-12 1226
-
电子稳定性控制系统ESC解决方案2010-04-12 5893
-
什么是车辆稳定性控制系统(VSC)2010-03-12 1762
-
时延网络控制系统的稳定性分析2009-08-13 444
-
控制系统的时域分析法--线性系统的稳定性2009-07-27 5356
-
控制系统时域仿真和稳定性研究2008-10-16 2525
全部0条评论

快来发表一下你的评论吧 !
