

一种单神经元模糊PID控制方法
电子说
描述
摘要: 针对传统PID控制方法对双转子永磁同步电机进行控制时参数摄动、抗干扰能力差等缺点,提出一种单神经元模糊PID控制方法。首先建立双转子永磁同步电机的数学模型,设计了单神经元模糊PID控制器,然后利用MATLAB实现了系统设计与仿真。最后通过传统PID和单神经元模糊PID控制的仿真结果进行对比分析,仿真结果表明,单神经元模糊PID控制可以显著提高系统的鲁棒性,使双转子永磁同步电机控制系统具有更好的动、静态性能和抗干扰能力。
0引言
在水下航行器行进过程中,为了保持自身姿态平稳,一般采用两台常规电机或者单台常规电机加复杂的行星减速器传动系统拖动双螺旋浆旋转。前者传动系统成本高,后者结构复杂,易出故障且机械传动效率较低[1]。
风力发电中采用永磁电机,但风力发电受天气影响较大,风速须达到特定的范围所得电压才可使用,风速过小或过大所得电压都无法并入电网,从而使得由永磁电机所设计的风力发电机所产生的可用电压范围较窄[2]。
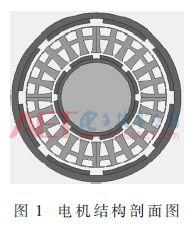
双转子永磁同步电机采用内外转子、中间定子结构,其可靠性高,定子铁心利用率高,系统运行效率高[3]。电机剖面图如图1所示。航行过程中自身即可抵消陀螺效应,可直接驱动对转螺旋推进系统。在风力发电领域可以拓宽可用电压范围。由于双转子永磁同步电机(DRPMSM)的上述诸多优点,使得它越来越受到专家学者的关注。
双转子永磁同步电机为典型的非线性强耦合系统,实际运行过程中会因为干扰或复杂变化等原因,影响控制精度和系统的稳定性。中采用模糊控制对双转子电机进行控制,但是模糊控制对模糊规则选择敏感,实时性无法保证;文献[7]中采用单神经元PID控制方法,虽然可以优化电机启动性能,但控制器增益无法实现自我调节;文献[8]中采用滑模变结构对永磁同步电机进行控制,但滑模轨迹在进行反向切换时不能连续,且控制过程复杂。
基于以上问题,本文提出了单神经元模糊PID控制方法,在MATLAB环境下搭建了系统仿真模型,并对比了传统PID控制与单神经元模糊PID控制的仿真结果。
1双转子永磁同步电机的数学模型
双转子永磁同步电机是一种新型电机,它与普通PMSM的差别在于原来静止的定子也可以旋转,所以两者具有相同的电磁关系,在建立电机数学模型前,做如下理想化假设[9]:
(1)电机各相绕组结构对称;
(2)电机具有正弦形反电动势波形;
(3)忽略磁路饱和;
(4)忽略磁滞损耗。
参照普通永磁电机,可得双转子电机的数学模型[10],如下所示:

2控制器原理及系统设计
2.1
单神经元PID控制器原理
单神经元控制器基于人脑神经元的结构与特征,其模型如图2所示。
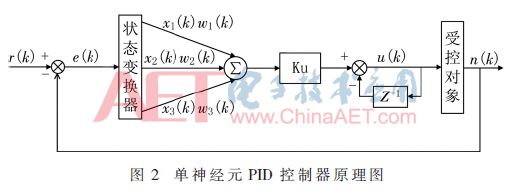
图2中r(k)为给定转速信号,n(k)为实际反馈信号,u(k)为单神经元PID控制器输出值,w1(k)、w2(k)、w3(k)是分别对应于x1(k)、x2(k)、x3(k)的加权系数。利用给定速度r(k)与实际输出信号n(k)之间的误差作为控制偏差:

再通过状态转换器转化为神经元学习控制所需要的状态量x1、x2、x3,从而可得:

采用上述学习规则系统可自动调节各输入量的权重。将这种控制策略应用于双转子永磁同步电机,可提高控制系统的抗干扰能力,简化算法的复杂度,可实现转速控制器的平稳饱和。但是对神经元比例系数K值选取却是人为设定的,且一旦选定,无法动态调节,选择起来十分困难,K值过高,会使得系统超调过大,增加系统响应时间;过低则系统响应速度变慢,实时性得不到保障。
2.2
单神经元模糊PID控制器设计
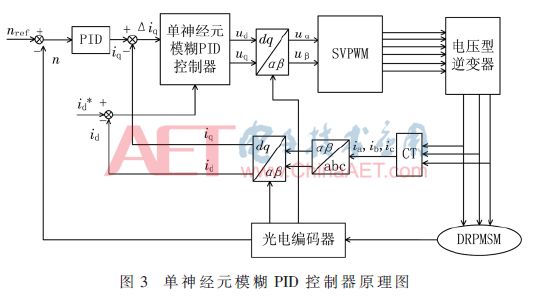
由于单神经元PID控制中的神经元比例系数选取困难,本文在此基础上设计了单神经元模糊PID控制器,其原理图如图3所示。
基于单神经元PID控制的缺点,本文通过模糊控制策略调整控制器增益,控制策略如图4所示。
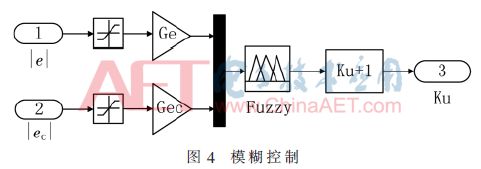
模糊PID控制系统性能取决于模糊控制规则的制定,本文在分析矢量控制转速响应曲线的基础上,制定了模糊控制规则[12]。
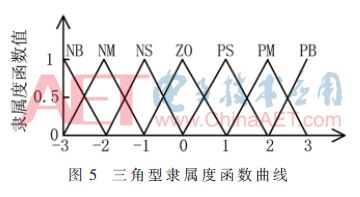
本文选取7个词汇描述输入输出变量,即{NB,NM,NS,ZO,PS,PM,PB},采用三角隶属度函数曲线作为输入/输出变量的隶属函数,如图5所示。它计算工作量少,灵敏度高。模糊推理采用Mamdani方法[13],反模糊化采用加权平均法。控制规则表如表1所示。

3仿真结果及分析
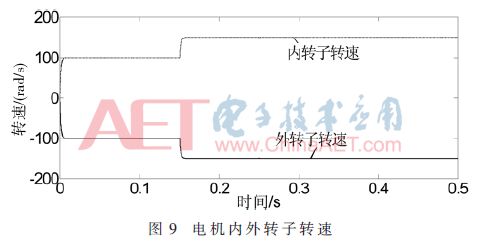
基于MATLAB搭建了电机矢量控制和单神经元模糊PID控制两种仿真控制模型,电机的各项参数如下所示:电机极对数为4,额定电压为220 V,内外电枢电阻为1.437 5 Ω,永磁磁链均为0.175 Wb,粘性摩擦系数为0,电机转子的dq轴等效电感为4.25×10-3 mH。在MATLAB/Simulink设置界面设定仿真模型起始时间为0 s,停止时间为0.5 s,初始给定速度值为100 rad/s;在0.15 s时内外转子给定转速从初始的100 rad/s跳变为150 rad/s;在0.25 s时内外电机转子力矩由1 N·m变为1.5 N·m。在此仿真基础上,分析电机的输出特性和响应速度。并且将实验结果与传统的矢量控制方法进行对比试验,从而可以验证本次所设计的双转子永磁同步电机数学模型的正确性和相应控制算法的控制效果。
图6~图8分别显示了在传统矢量控制下,双转子永磁同步电机在内外转子转速、力矩和三相电流的响应曲线。从仿真结果的波形分析中可以看到,传统的矢量控制方法所得的内外电机的转速响应曲线具有较大的超调量和较长时间的震荡调整过程;对于电机的力矩,当转速发生改变时,力矩变化明显;而对于三相电流,在电机达到预定转速和转速发生改变时,三相电流变化幅度较大,电机在较长时间里方能达到设定值。
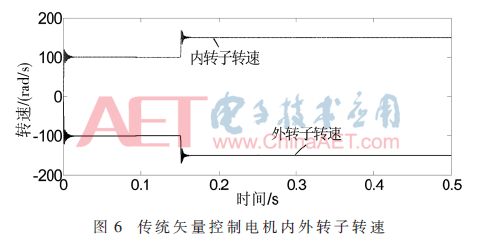
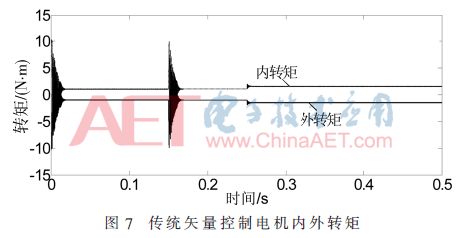
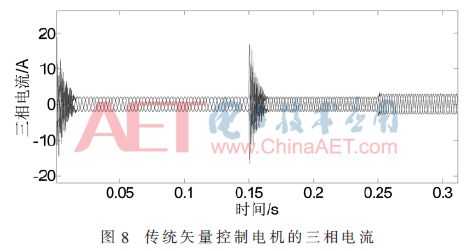
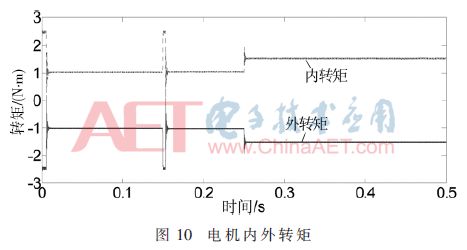
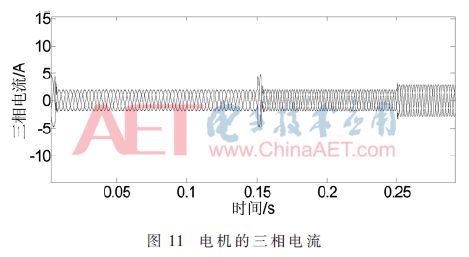
图9~图11是利用单神经元模糊PID控制方法所得的响应曲线图,可以看到电机在较短时间里转速达到了设定值100 rad/s,当电机到达稳定速度并持续一段时间以后,在0.15 s时将内外转子速度从100 rad/s跳变为150 rad/s。从图9可以看出,与矢量控制相比,当设定转速发生改变时,内外转子的转速都快速地达到了给定的转速,响应速度较快。同样地,可以看到内外电机的力矩响应曲线,在较短时间里面内外转子力矩达到了给定值,从图10看出内外电机的电磁转矩保持在给定值1 N·m的电磁转矩不变。持续一段时间以后。由于在0.15 s时设定转速变大,使得内外转子力矩发生波动,但是从图10可知,力矩很快恢复到稳定值。当电机三相电流在给定内外转子转速和力矩的情况下,在较快速度下达到稳定值,在达到稳定稳定状态并持续一段时间以后,由于转速发生改变,使得三相电流出现了波动,但是随后快速稳定下来,如图11所示。在0.25 s时人为将力矩变为1.5 N·m,从图10可以看出电机内外转速受力矩变化影响很小,几乎没有变化,在图10中,当力矩大小发生改变时,电机的力矩响应非常迅速,很快就达到了1.5 N·m。图11看出当三相电流的波形曲线在力矩发生改变的同时,能够快速的响应,达到较理想的稳定状态。
总的来说,仿真结果表明,本文所设计的双转子永磁同步电机(DRPMSM)单神经元模糊PID控制系统仿真结果在运行过程中,转速、力矩、三相电流都能保持平稳,当转速、力矩在某时间段里改变的情况下,也能够在短时间里稳定下来。与传统的矢量控制方法相对比,本次所设计的控制系统响应速度更快,仿真结果较理想。
4结论
本文分析了双转子永磁同步电机(DRPMSM)的工作原理,建立了电机的数学模型,搭建了单神经元模糊PID控制系统,并进行了对比仿真研究。仿真结果表明:在转速、力矩发生改变的情况下,采用单神经元模糊PID控制方法运行响应速度都达到了预期的实验效果,相比于传统的矢量控制系统具有更好的动静态性能。通过仿真结果的分析,深入了解了双转子永磁同步电机的转速、力矩和相电流各自的特点和它们之间的相互影响。同时,本次试验结果也为进一步分析和设计双转子永磁同步电机(DRPMSM)本体结构和控制策略提供了参考。当然本文对电机内外转子之间的相互干扰并未做相关分析,对于如何优化控制策略,使控制器性能达到最优还有待进一步实验分析,在今后的研究中,相信对于本体结构优化设计、电机数学模型的改进以及控制算法的创新会是双转子永磁同步电机研究的重点。
-
无刷直流电机单神经元PI控制器的设计2025-06-26 368
-
如何去设计一种自适应神经元控制器?求过程2021-05-17 1740
-
基于单神经元的PID控制实现2018-08-31 14826
-
基于单神经元PID的WSNs邻居节点级功率控制算法_何世钧2017-03-19 1073
-
基于WLAN与单神经元自适应PID的空调系统设计2011-06-22 913
-
采用单神经元自适应控制高精度空调系统仿真2010-03-18 2245
-
基于单神经元PID的航空发动机解耦控制2010-02-11 948
-
一种改进的单神经元二自由度PID控制2009-08-27 538
-
单神经元自适应PID控制在电动油门控制中的应用2009-08-13 847
-
单神经元自适应PID控制器设计方法研究2009-07-30 687
-
单神经元PID双直线电机同步控制2009-06-17 682
-
一种基于PID神经网络的解耦控制方法的研究2009-06-15 738
-
单神经元PID算法在倒立摆控制系统中的应用2009-06-11 548
-
适用于非线性对象的模糊一神经元控制方法2009-03-17 376
全部0条评论

快来发表一下你的评论吧 !
