

Vector全流程开发工具链概述
描述
在软件定义汽车(SDV)时代,汽车软件的复杂度和重要性显著提升,开发模式也逐步从基于ECU的独立软件开发向集中化、平台化的软件架构演进。传统的开发模式由于硬件与软件紧耦合,导致升级难度大、开发周期长,难以满足当前智能网联汽车的发展需求。因此基于模型的系统工程(MBSE,Model-Based Systems Engineering)方法成为主流,允许开发人员在统一的系统架构模型中完成从需求定义、软件设计到ECU级别的配置管理,提高软件复用性。
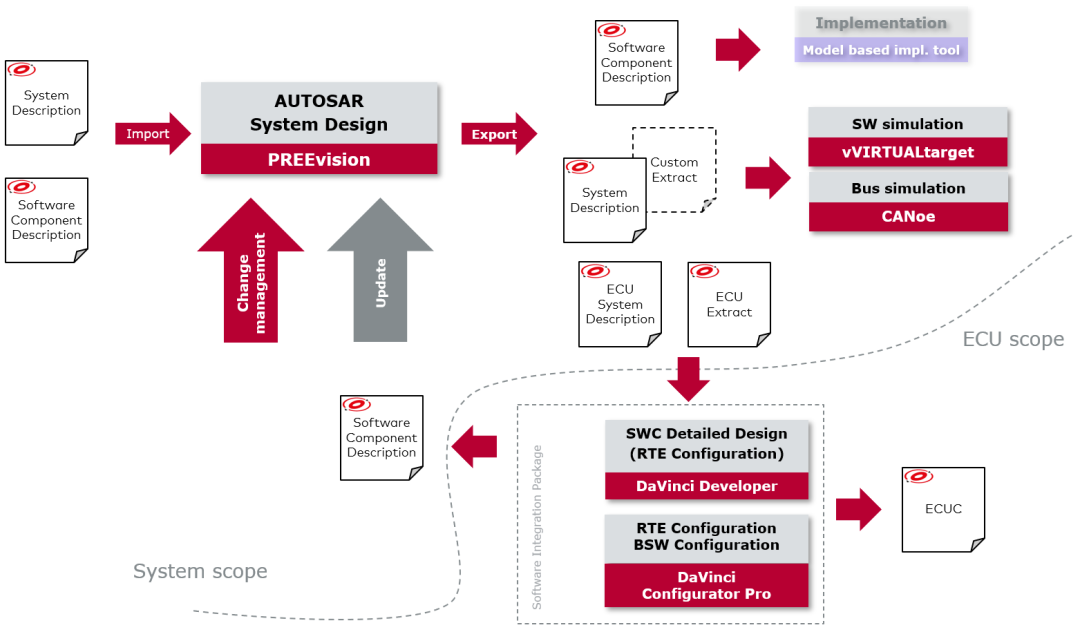
本示例旨在展示如何使用PREEvision进行系统建模与软硬件设计,并将其集成到Davinci Configurator进行详细ECU配置,最终在CANoe中进行系统验证,以确保功能的正确性。
整个流程涵盖了从概念建模到功能验证的完整开发链路,帮助开发人员理解PREEvision在ECU开发和测试中的作用,以及它如何与下游工具链进行高效协同。
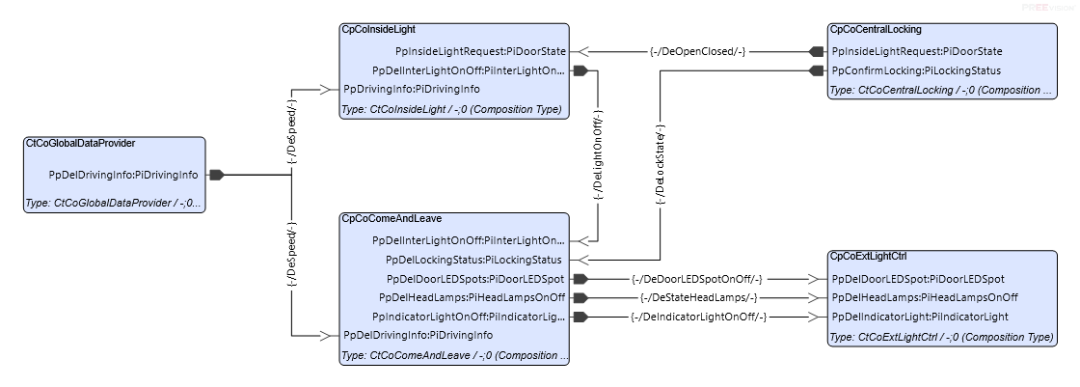
本示例以车内灯控制功能为核心,控制功能的基本逻辑如下:
门控模块监测车门开关状态和门锁状态,并将状态信号发送至车身控制模块;
车身控制模块根据接收到的信号进行逻辑判断,决定是否打开或关闭车内LED照明灯以及迎宾灯;
车身控制模块发送控制信号到左右车门控制器,控制车内LED照明灯以及迎宾灯的亮灭。
在PREEvision中创建Root Composition,作为系统架构的顶层容器。使用Diagram视图绘制软件架构图,定义各个软件组件(SWC)。
在第4节,我们重点展示了从PREEvision的设计输出到下游DaVinci和CANoe中的验证与测试结果,是大部分用户关注的重点。
Toolchain技术文档核心内容:
概述从PREEvision架构设计到DaVinci集成以及CANoe仿真测试的工具链全流程,以实际功能点出发,展示工具链的设计与集成;
以车内灯控制功能为例,详细演示PREEvision、DaVinci以及CANoe必要的设计配置步骤,使工程师了解各工具之间的边界;
客户实际关心的问题汇总,帮助大家更好地了解和使用各个工具。
小结
本文从功能场景出发,梳理了从PREEvision架构设计,到DaVinci集成配置,再到CANoe仿真测试的完整工具链流程,并结合车灯控制功能,深入解析三款核心工具的协同边界。
我们也针对客户在实际使用过程中最常提出的问题进行了整理与回应,希望能够帮助大家更高效地理解并应用这套工程工具链。
-
IAR开发工具链有什么优势2025-08-06 1440
-
IAR开发平台升级Arm和RISC-V开发工具链,加速现代嵌入式系统开发2025-06-11 1274
-
AI开发工具分类与功能2025-04-12 1514
-
请问最新的riscv gcc 开发工具链在哪能下载?2022-06-20 1748
-
嵌入式Linux_C语言开发工具2021-11-01 1057
-
FPGA开发的完整的流程及开发过程中使用到的开发工具有哪些?2021-04-29 1907
-
区块链入门开发工具Forge介绍2019-12-03 2418
-
Zynq-7000 All Programmable SoC的开发工具概述2018-11-26 4056
-
代码编译器Studio开发工具特征详细的表格分析概述2018-05-07 999
-
web前端开发工具排行:8款html开发工具推荐下载2018-02-01 86462
-
ARM开发工具解读2017-10-18 1723
-
STM32 VR开发工具2017-02-17 1239
-
爱特梅尔开发工具平台简化MCU设计流程2013-06-13 1173
-
CodeWarriorTM开发工具套件2011-05-19 684
全部0条评论

快来发表一下你的评论吧 !
