

小安派BW21-CBV-Kit入门教程之DMP6读取MPU6050数据
描述
作为一款本地AI图象识别开发板,BW21-CBV-Kit它能够独自运行目标识别模型。2.4GHz+5GHz的双频Wi-Fi,提供高性能的无线传输能力,让图象传输更加流畅。丰富的接口,搭配着AI识别,可以扩展出无限可能。
BW21-CBV-Kit支持Arduino的开发方式,可以简单实现一些DIY想法,例如:人脸识别、手势识别、物品识别等。
这次小安给大家带来的是DMP6 读取 MPU6050 数据:
用料
BW21-CBV-Kit x 1
MPU6050 x 1
示例
本示例将演示使用 DMP6 从 MPU6050 获取数据。MPU6050 配备了数字运动处理器 (DMP),用于处理运动算法的计算,如转换为三轴偏航/俯仰/滚动平面、转换为四元数或转换为欧拉角。
本指南将同样适用于这两个示例:
MPU6050_DMP6.ino
MPU6050_DMP6_using_DMP_V6v12.ino
这两个示例的区别在于所使用的 DMP 库:
MPU6050_DMP6.ino 的 DMP 库版本为 2.0。 对于 MPU6050_DMP6_using_DMP_V6v12.ino,DMP 库版本为 6.12。
实现流程
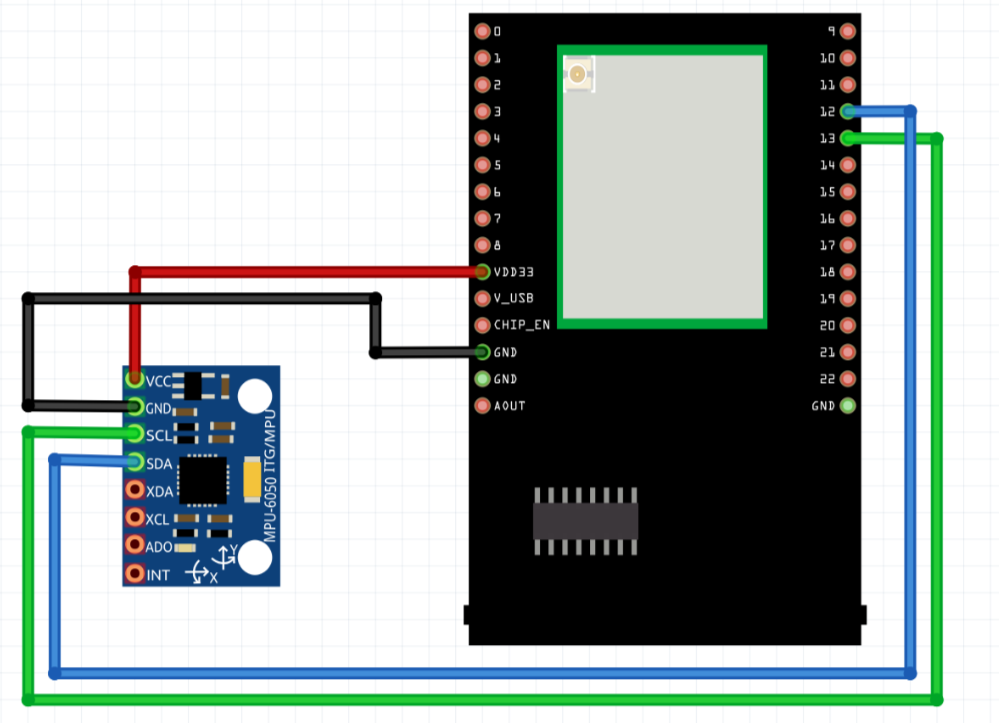
如下图所示,将 MPU6050 连接到电路板的 I2C_SDA 和 I2C_SCL。
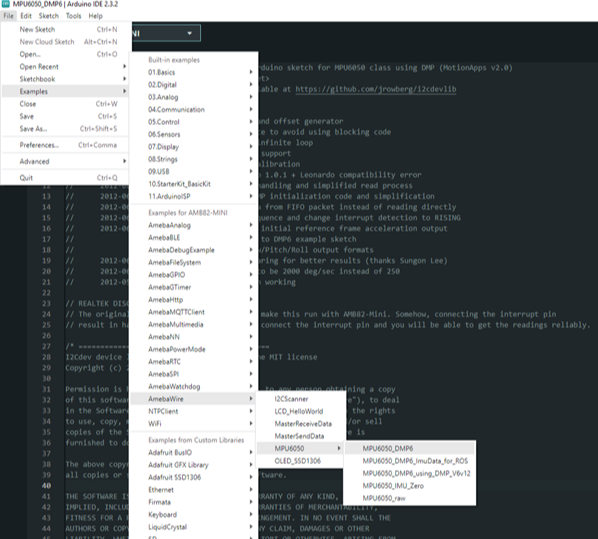
在 "文件"->"示例"->"AmebaWire"->"MPU6050"->"MPU6050_DMP6 "或 "MPU6050_DMP6_using_DMP_V6v12 "中打开示例:
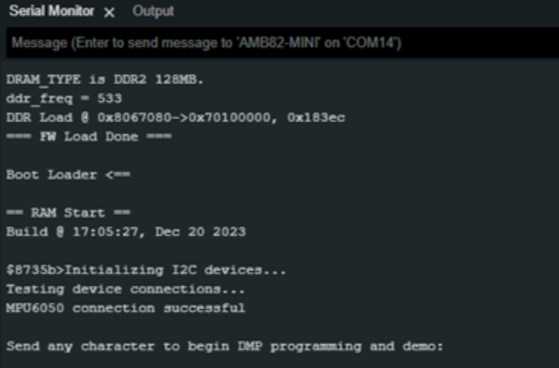
编译并运行示例。在串行监视器中,应该可以看到开始 DMP 编程的提示。在串行监视器上输入任意字符,然后按 "Enter "键。
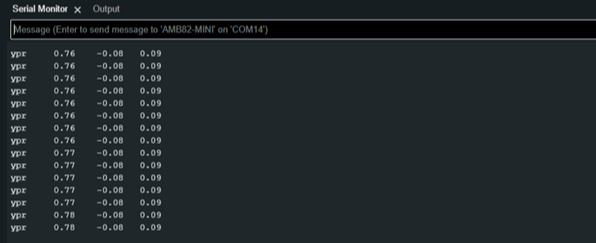
您应该可以看到 DMP 计算出的输出值。
您可以选择取消其中一个选项的注释,以查看要打印输出的数据类型。选项包括:
OUTPUT_READABLE_QUATERNION OUTPUT_READABLE_EULER OUTPUT_READABLE_YAWPITCHROLL OUTPUT_READABLE_REALACCEL OUTPUT_READABLE_WORLDACCEL OUTPUT_TEAPOT
本例中使用的选项是 OUTPUT_READABLE_YAWPITCHROLL。
ElectronicCats 的原始示例使用的是中断引脚。使用中断引脚会导致 MPU6050 挂起,因此本示例只有在不使用中断引脚的情况下才能可靠运行。
代码参考
[1] ElectronicCats 的 MPU6050 库和示例:
https://github.com/ElectronicCats/mpu6050
-
小安派BW21-CBV-Kit开发板教程——I2C之主机扫描设备2025-04-15 2227
-
小安派BW21-CBV-Kit入门教程之主机模式读取Arduino UNO从机2025-05-21 1538
-
小安派BW21-CBV-Kit入门教程之读取DHT温湿度传感器2025-02-18 1649
-
小安派BW21-CBV-Kit入门教程之OLED显示2025-05-17 1818
-
小安派BW21-CBV-Kit入门教程之主机模式对Arduino UNO发送数据2025-05-29 1184
-
小安派BW21-CBV-Kit入门教程之MPU6050 IMU零点检测2025-07-04 1783
-
基于stm32f103的mpu6050自带的dmp数据读取实验程序2015-12-08 3335
-
BW21-CBV-Kit的使用教程2025-01-03 1909
-
小安派BW21-CBV-Kit入门教程:中断控制LED2025-01-21 1445
-
小安派BW21-CBV-Kit入门教程之超声波测距2025-02-11 1410
-
直接送!50套小安派 BW21-CBV-Kit Ai图像识别开发板!2025-02-19 1216
-
用安信可AI人脸识别开发板BW21-CBV-Kit驱动墨水屏2025-03-06 1201
-
小安派BW21-CBV-Kit入门教程之LCD屏显示数据2025-04-23 1143
-
小安派BW21-CBV-Kit入门教程之驱动ILI9341 TFT显示屏2025-11-13 1486
-
小安派BW21-CBV-Kit入门教程之BLE传输DHT数据2026-01-22 905
全部0条评论

快来发表一下你的评论吧 !
