

NVIDIA Isaac Sim 4.5.0与lsaac Lab 2.0的安装教程
描述
先进的机器人仿真平台有助于机器人学习和无需实体机器人的虚拟机器人测试。NVIDIA Isaac Sim 是一款基于 NVIDIA Omniverse 构建的参考应用,开发者能够在基于物理的虚拟环境中模拟和测试 AI 驱动的机器人开发解决方案。而 NVIDIA Isaac Lab 是基于 Isaac Sim 开发的用于机器人学习的开源模块框架,能够利用 NVIDIA PhysX 以及基于物理性质的 NVIDIA RTX 渲染实现高保真物理仿真。
Isaac Sim 和 Isaac Lab 目前开放下载的版本是 Isaac Sim 4.5.0 以及 Isaac Lab 2.0,本篇文章将为大家带来这两个软件的安装教程。
在此提醒下,Isaac Sim 4.5.0 将是 Omniverse Launcher 的最后一个版本,从 2025 年 10 月 1 日起,Omniverse Launcher、Nucleus Workstation 和 Nucleus Cache 将不再可用,如果继续使用,功能可能会减少。
在安装 Isaac Sim 之前,需要确保计算机是否满足系统要求和兼容性,以下是最低规格要求:
操作系统:Ubuntu 20.04/22.04、Windows 10/11 及以上
CPU:Intel Core i7、AMD Ryzen 5 及以上
内存:32GB 以上
GPU:具备 RT Core,8GB 以上
驱动程序:推荐 Windows 537.58 和 Linux 535.129.03
一、演示环境
1. 硬件:
服务器:LEADTEK GS4850H
GPU:NVIDIA RTX 5880 Ada Generation
2. 软件
虚拟化平台:Proxmox Virtual Environment 虚拟化平台,配置显卡直通环境
系统:Ubuntu 22.04.5

二、Isaac Sim 4.5.0 安装
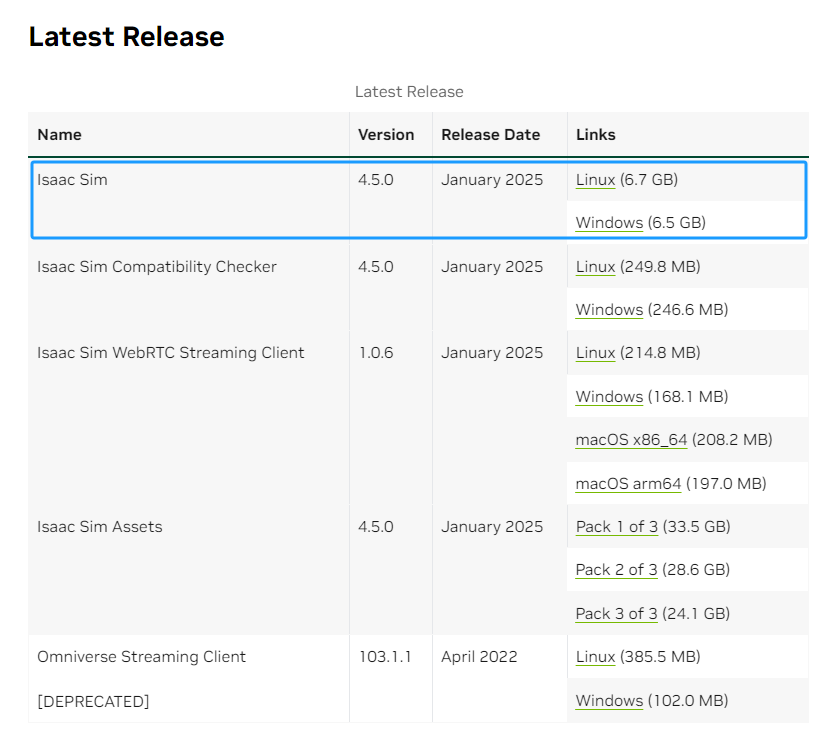
1. 前往官网下载软件包:
https://docs.isaacsim.omniverse.nvidia.com/latest/installation/download.html
(复制链接至浏览器打开,下同)
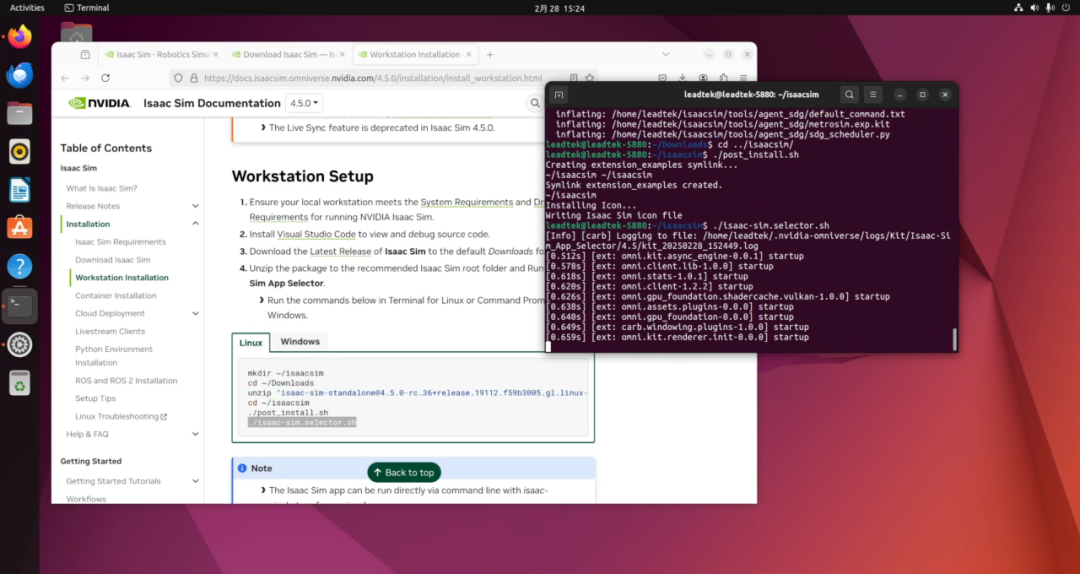
2. 创建对应目录然后解压安装包进行安装。可通过以下命令运行 Isaac Sim App Selector。Isaac Sim App Selector 是一款迷你窗口应用程序,可帮助以不同模式运行 Isaac Sim。
在 Linux 中运行以下命令:
mkdir ~/isaacsim cd ~/Downloads unzip "isaac-sim-standalone@4.5.0-rc.36+release.19112.f59b3005.gl.linux-x86_64.release.zip" -d ~/isaacsim cd ~/isaacsim ./post_install.sh ./isaac-sim.selector.sh
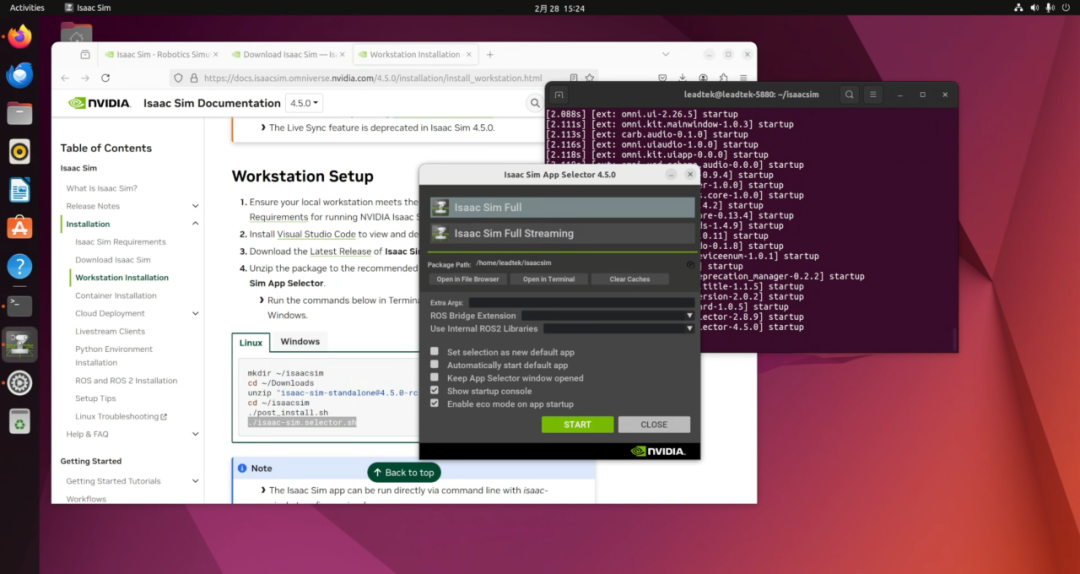
3. 至此,已完成 Isaac Sim 4.5.0 版本的基本安装。
*以上安装步骤参考官方 Workstation Installation 教程,其他环境(如容器/云)安装可根据官网步骤进行安装:
https://docs.isaacsim.omniverse.nvidia.com/latest/installation/install_workstation.html
三、Isaac Lab 2.0 部署
Isaac Lab 建立在 Isaac Sim 平台之上。此前已经安装好了 Isaac Sim 4.5.0,本次演示采用 binaries installation,使用二进制文件进行安装,在部署 Isaac Lab 之前只需要验证 Isaac Sim 安装是否成功即可。
1. 验证 Isaac Sim
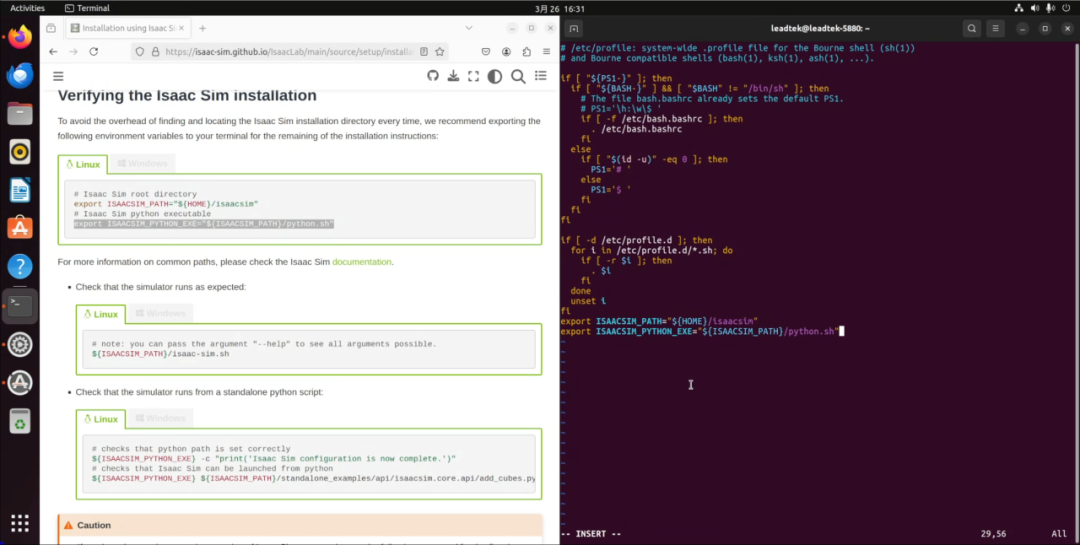
1.1 为避免每次查找和定位 Isaac Sim 安装目录,建议先将以下环境变量输入到终端:
# Isaac Sim root directory
export ISAACSIM_PATH="${HOME}/isaacsim"
# Isaac Sim python executable
export ISAACSIM_PYTHON_EXE="${ISAACSIM_PATH}/python.sh"
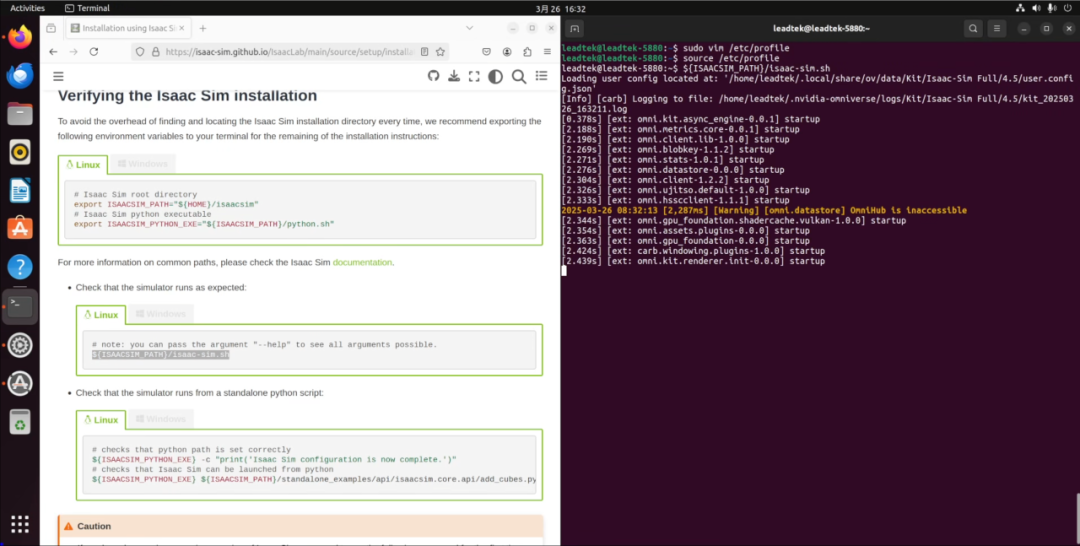
1.2 刷新环境变量并运行脚本验证。
# note: you can pass the argument "--help" to see all arguments possible.
${ISAACSIM_PATH}/isaac-sim.sh
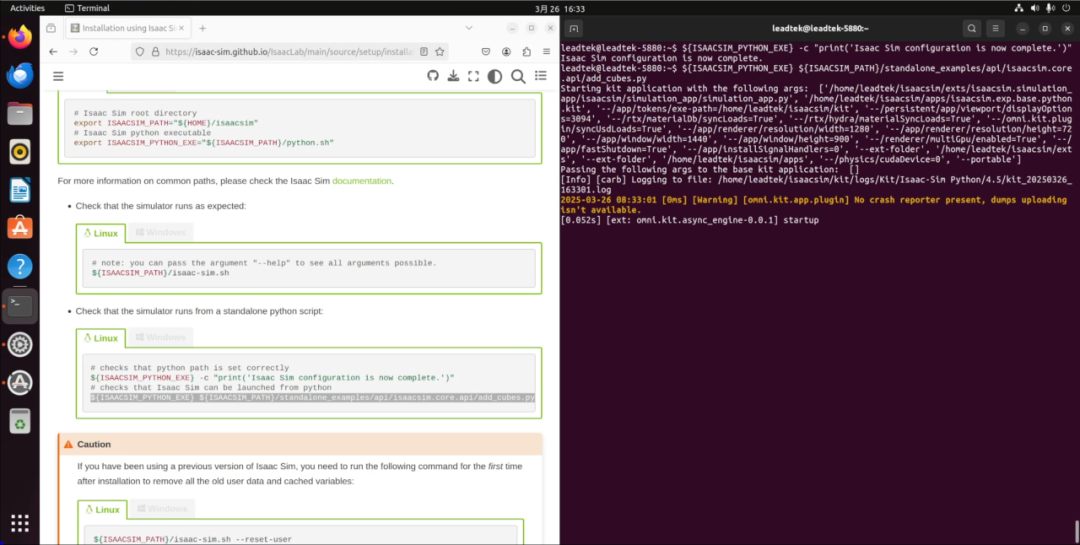
1.3 验证 Isaac Sim 是否可以通过独立的 python 脚本运行。
# checks that python path is set correctly
${ISAACSIM_PYTHON_EXE} -c "print('Isaac Sim configuration is now complete.')"
# checks that Isaac Sim can be launched from python
${ISAACSIM_PYTHON_EXE} ${ISAACSIM_PATH}/standalone_examples/api/isaacsim.core.api/add_cubes.py
2. 安装 Isaac Lab
2.1 前往 github 克隆项目文件。
SSH:
git clone git@github.com:isaac-sim/IsaacLab.git
HTTPS:
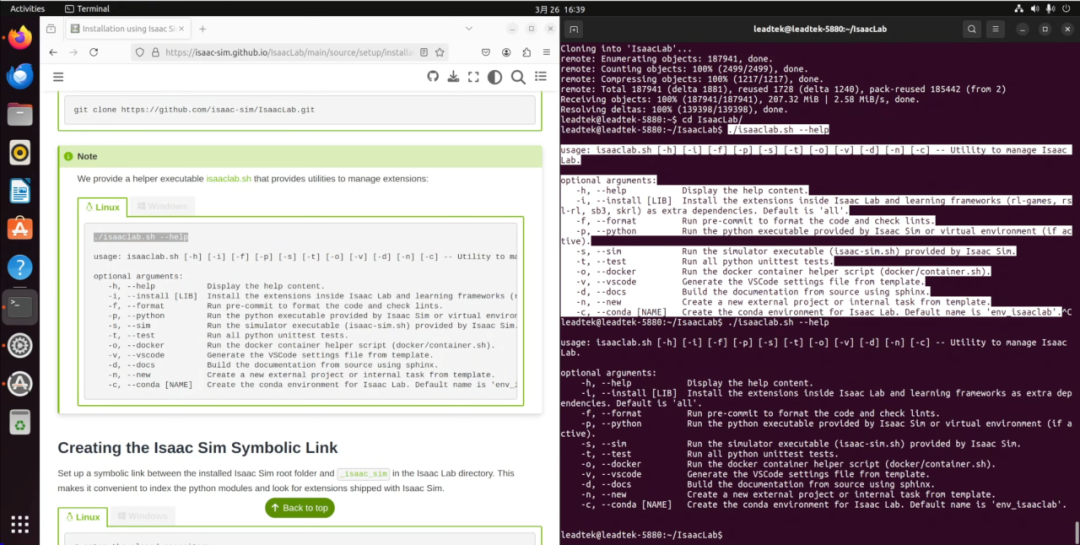
git clone https://github.com/isaac-sim/IsaacLab.git
2.2 确认是否可以正常运行。
./isaaclab.sh --help usage: isaaclab.sh [-h] [-i] [-f] [-p] [-s] [-t] [-o] [-v] [-d] [-n] [-c] -- Utility to manage Isaac Lab. optional arguments: -h, --help Display the help content. -i, --install [LIB] Install the extensions inside Isaac Lab and learning frameworks (rl_games, rsl_rl, sb3, skrl) as extra dependencies. Default is'all'. -f, --format Run pre-commit to format the code and check lints. -p, --python Run the python executable provided by Isaac Sim or virtual environment (if active). -s, --sim Run the simulator executable (isaac-sim.sh) provided by Isaac Sim. -t, --test Run all python pytest tests. -o, --docker Run the docker container helper script (docker/container.sh). -v, --vscode Generate the VSCode settings file from template. -d, --docs Build the documentation from source using sphinx. -n, --new Create a new external project or internal task from template. -c, --conda [NAME] Create the conda environment for Isaac Lab. Default name is'env_isaaclab'.
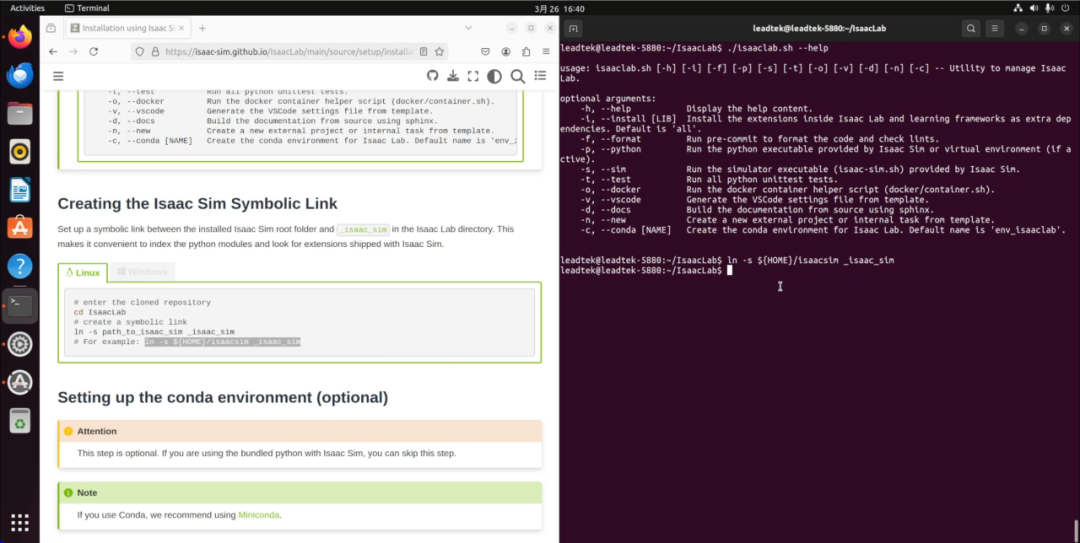
2.3 为 Isaac Sim 的安装目录创建一个名为 _isaac_sim 的符号链接(软链接),方便在 Isaac Lab 目录使用。
# enter the cloned repository
cd IsaacLab
# create a symbolic link
ln -s path_to_isaac_sim _isaac_sim
# For example: ln -s ${HOME}/isaacsim _isaac_sim
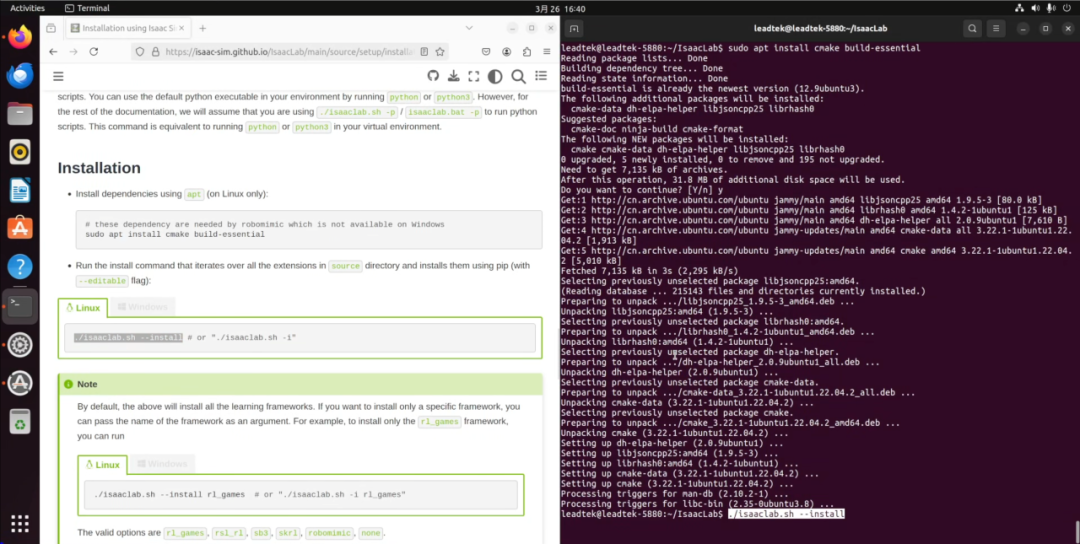
2.4 安装 Isaac Lab。
先安装所需要的依赖项:
# these dependency are needed by robomimic which is not available on Windows sudo apt install cmake build-essential
然后运行 install 命令,该命令会遍历目录中的所有扩展程序并进行安装:
./isaaclab.sh --install # or "./isaaclab.sh -i"
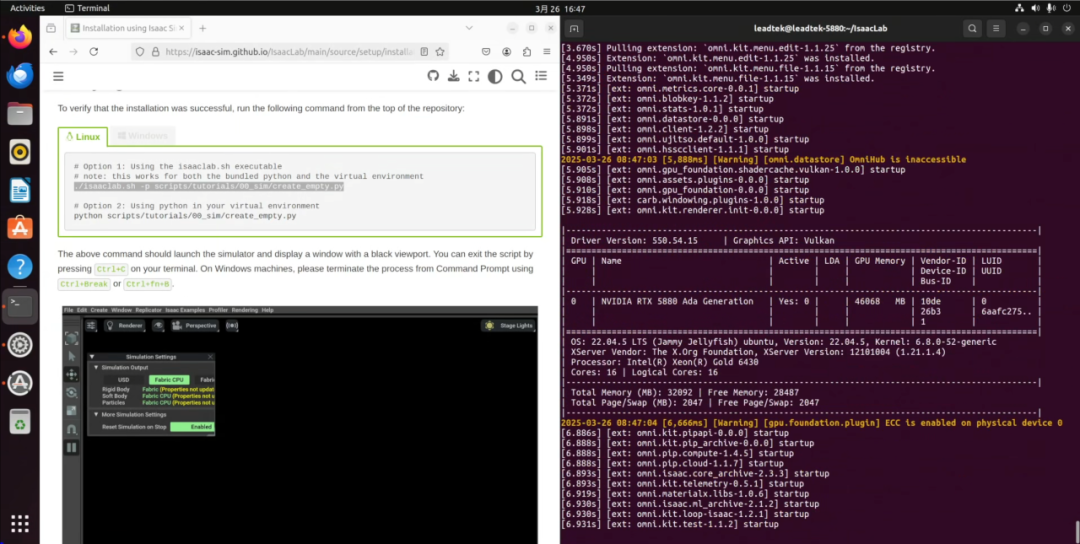
2.5 验证 Isaac Lab。使用 isaaclab.sh 可执行文件进行环境验证。
# Option 1: Using the isaaclab.sh executable # note: this works for both the bundled python and the virtual environment ./isaaclab.sh -p scripts/tutorials/00_sim/create_empty.py # Option 2: Using python in your virtual environment python scripts/tutorials/00_sim/create_empty.py
2.6 完成以上步骤,便可把 Isaac Sim 4.5 和 Isaac Lab 2.0 顺利部署至环境中。
四、机器人仿真环境推荐硬件配置
机器人仿真需要算力来加速机器人运动模拟、碰撞检测等行为,同时要对大量的几何模型和场景进行渲染,所以,仿真硬件性能的需求也尤为关键。以下是丽台针对个人开发者/研究人员的机器人仿真环境推荐配置,聚焦于流畅运行 Isaac Sim 4.5.0 以及 Isaac Lab 2.0(工程文件导入、参数调整及强化学习训练),导入验证完成后可再与企业级多卡集群方案形成互补,能够完全满足中小规模的实验需求。
LEADTEK WS3008 产品特性
支持选配 2 张 NVIDIA RTX 5880 Ada GPU
支持单 Intel Xeon W-3400、W-2400 系列处理器
Intel W790 芯片组
支持最高至 350W CPU TDP
支持最多 DDR5-4800MHz x8 内存
支持 4 PCIe 5.0 x16 插槽
支持 1 M.2 NVMe PCI-E 4.0 x4
支持 2 个 10GbE BaseT、1 个 2.5GbE BaseT 和 1 个 1GbE BaseT 网口
支持 1 个 IPMI 管理口
支持 2 个 USB-A
支持 1 个 VGA 口,1 个 COM 口
支持 1 个 1200W/1300W 铂金电源
机箱体积:400.0×278.0×167.6 mm
-
NVIDIA Isaac Lab可用环境与强化学习脚本使用指南2025-07-14 2689
-
基于Omniverse的NVIDIA Isaac Sim现已发布公测版2021-06-22 5173
-
用NVIDIA Omniverse ISAAC Sim加速机器人仿真2022-04-27 4306
-
NVIDIA Isaac Sim 2022.1版本的亮点及功能2022-07-01 3849
-
NVIDIA AI机器人开发— NVIDIA Isaac Sim入门2022-10-19 3088
-
开发者使用NVIDIA Omniverse和Isaac Sim构建机器人2022-10-21 1059
-
NVIDIA 公开课 | AI 机器人开发第二讲 — Isaac Sim 高阶开发2022-11-10 2028
-
CES | 用 NVIDIA Isaac Sim 2022.2 模拟未来智能机器人2023-01-06 2388
-
使用 ROS 2 MoveIt 和 NVIDIA Isaac Sim 创建逼真的机器人模拟2023-05-12 3902
-
使用 NVIDIA Isaac 仿真并定位 Husky 机器人2023-12-26 3702
-
坚米智能借助NVIDIA Isaac Lab加速四足机器人开发2024-12-29 2598
-
NVIDIA Isaac Sim与NVIDIA Isaac Lab的更新2025-05-28 2452
-
NVIDIA Isaac Sim和Isaac Lab现已推出早期开发者预览版2025-07-04 2084
-
NVIDIA Isaac Lab多GPU多节点训练指南2025-09-23 2673
-
NVIDIA Isaac Lab推动机器人技术突破2025-10-21 1388
全部0条评论

快来发表一下你的评论吧 !
