

中伟视界:罐笼超员监测AI算法,智慧矿山运输的安全新标准
描述
罐笼超员风险与智能化需求
矿山罐笼作为矿工上下井的核心运输设备,其超员运行可能引发坠罐、卡阻等重大事故。传统人工计数方式存在无法实时停运罐笼、效率低、易出错、无法实时预警等问题。随着人工智能与边缘计算技术的发展,基于AI视觉算法的罐笼超员监测系统已成为智慧矿山建设的关键环节。本方案从技术原理、系统实现到应用价值,全面解析AI算法如何实现罐笼人员的精准计数、实时预警与智能管控,为矿山安全管理提供技术保障。
一、罐笼超员AI算法的核心原理
1.1 基础检测机制:动态进出统计
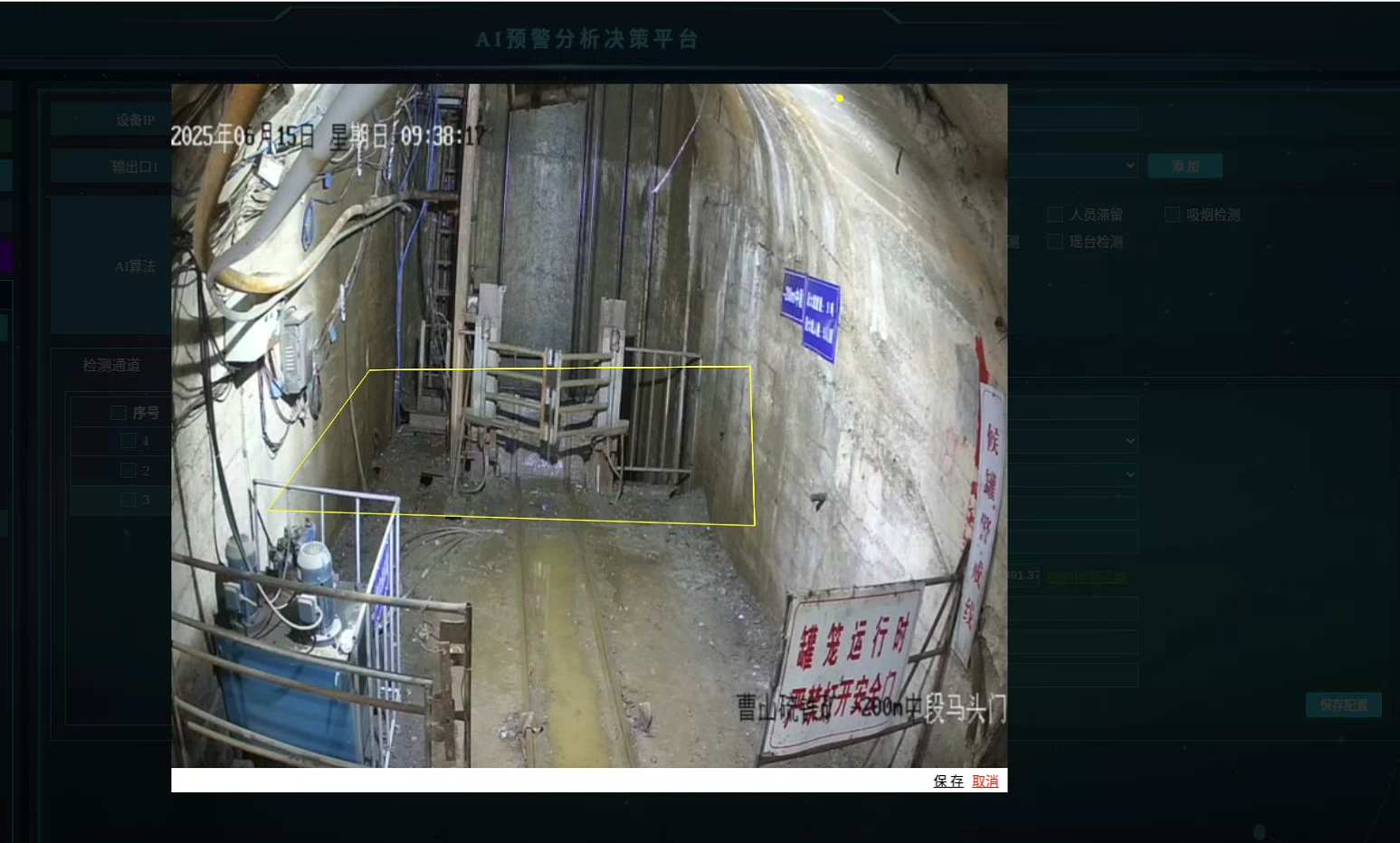
罐笼超员AI算法的核心在于实时检测和精准统计进出罐笼的人员数量。系统通过在罐笼入口处设置虚拟检测框,记录人员进出信号:
入框计数:人员从罐笼一端进入检测框时,系统自动计数+1
出框计数:人员从另一端离开时,计数-1
累积判断:当累积人数达到预设阈值(如30人)时,立即触发声光报警并抓拍现场图像

此过程通过目标跟踪算法(如卡尔曼滤波)实现人员运动轨迹预测,为每个目标赋予唯一ID,结合预设的计数线公式(y=ax+b)计算人员跨越方向,避免重复或遗漏计数。
1.2 多维度相机协同方案:俯视视角防遮挡
针对传统单相机易受罐笼附近逗留人员干扰的问题,多相机协同方案显著提升精度:
三相机布局:
第一相机:大罐笼入口通道顶部(俯视拍摄)
第二相机:小罐笼入口通道顶部(俯视拍摄)
第三相机:罐笼对面(监测围栏状态)
动态触发逻辑:
- 第三相机检测围栏打开后,判断罐笼类型(大/小)
- 开启对应通道的顶部相机进行计数
- 围栏关闭时启动入侵检测,防止人员滞留危险区

该设计通过俯视视角减少遮挡,结合围栏状态联动相机启停,有效区分进出人员与逗留人员,误检率降低60%以上。
二、技术实现关键:硬件融合与算法优化
2.1 硬件配置与环境适配
矿山井下环境复杂(高粉尘、低光照、潮湿),需针对性设计硬件系统:
高清广角摄像头:1080P以上分辨率,120°广角覆盖罐笼全貌
嵌入式AI板卡:集成于井口矿用图像处理仪,直接联动闸机控制(无需外接服务器)
工业级防护:设备需达到IP67防护等级,适应矿山防尘防潮需求
2.2 算法流程与参数优化
系统的准确性依赖算法流程的精细化设计:
目标跟踪流程:
- 目标检测:YOLOv8模型识别视频流中人员
- 轨迹预测:卡尔曼滤波预判下一帧位置,生成临时轨迹(tracks)
- ID匹配:匈牙利算法将检测框与预测轨迹关联,赋予唯一ID
- 方向判定:通过计数线坐标变化判断进出方向
关键参数设置:

清零机制是防误报的核心:系统在设定时间(如30秒)内无人员进入时自动清零,避免因人员延迟离开导致计数累积错误。
三、从精准计数到智慧安全生态
罐笼超员AI算法通过机器视觉、边缘计算与多传感器融合,将传统依赖人力的被动监管转变为实时响应的智能防控体系。其价值不仅在于解决超员问题,更成为智慧矿山安全生态的核心节点——通过与人员定位、设备监控、应急系统的深度集成,实现“监测-预警-处置-优化”的全流程闭环管理。随着嵌入式AI板卡的普及与算法持续优化,罐笼安全管控将向更低成本、更高鲁棒性方向演进,最终推动矿山安全管理迈入无人化、预判化的新阶段。
“矿山安全的未来不在于更严的规章,而在于更聪明的技术。当AI能在一秒内阻止一次超员事故,矿工的生命就多了一万种可能。” —— 智慧矿山安全白皮书 2025

矿山版分析服务器、AI盒子、IPC包含的算法有:皮带跑偏、皮带异物、皮带撕裂、皮带划痕、皮带运行状态识别(启停状态)、运输带有无煤识别、煤流量检测、运输带坐人检测、行车不行人、罐笼超员、静止超时、摇台是否到位、入侵检测、下料口堵料、运输带空载识别、井下堆料、提升井堆煤检测、提升井残留检测、瓦斯传感器识别、猴车长物件检测、佩戴自救器检测、风门监测、运料车通行识别、工作面刮板机监测、掘进面敲帮问顶监控、护帮板支护监测、人员巡检、入侵检测、区域超员预警、未戴安全帽检测、未穿工作服识别、火焰检测、离岗睡岗识别、倒地检测、摄像机遮挡识别、摄像机挪动识别等等算法。
审核编辑 黄宇
- 相关推荐
- 热点推荐
- AI算法
-
中伟视界:智慧矿山如何实现行人不行车的安全管理2025-02-18 897
-
中伟视界:非煤矿山智能化改造解决方案2024-11-23 1158
-
中伟视界:矿山罐笼乘员安全监测系统防止矿山事故2024-10-08 872
-
中伟视界:矿山智能化安全生产,未戴自救器检测AI算法助力保护作业人员安全2024-07-17 1303
-
中伟视界:智能监控和预警,静止超时AI算法如何提升非煤矿山安全?2024-07-14 5210
-
中伟视界:实时监控与预警,矿山罐笼超员AI算法如何保障矿工生命安全?2024-07-12 1413
-
中伟视界:提升矿山安全生产水平,人员入井智能分析算法技术细节解析2024-07-11 1208
-
AI算法应用在智慧矿山:矿山自救器检测发挥重要作用2023-12-08 1089
-
提升智慧矿山运输效率的皮带跑偏视频分析AI算法2023-10-31 1220
-
创新AI算法解密智慧矿山猴车安全之解法2023-10-30 1131
-
智能矿山AI算法助你轻松掌握护帮板正常打开状态2023-10-29 1021
-
中伟视界&矿山安全生产:煤矿智慧矿山建设思路,ai部分包含哪些内容2023-09-27 1181
-
中伟视界&矿山安全生产:露天煤矿智慧矿山ai建设,AI能解决哪些安全隐患?2023-09-26 1137
全部0条评论

快来发表一下你的评论吧 !
