

基于FPGA的转移型面阵CCD驱动电路设计
可编程逻辑
描述
0 引言
CCD(Charge Coupled Device)是20世纪70年代初发展起来的新型半导体集成光电器件,它可以把通过光学镜头投影到其上的景物可见光信号转换成比例的电荷包,并在适当的时钟脉冲的驱动下进行定向转移,从而输出成为电压视频图像。CCD具有集成度高、功耗小、体积小、工作电压低、灵敏度高等优点,目前已广泛应用与空间遥感、对地观测等领域。
按结构分类,CCD可分为线阵CCD和面阵CCD,而面阵CCD按排列方式又可分为全帧转移(Full Frame)CCD、帧转移(Frame Transfer)CCD以及行间转移(Interline Transfer)CCD。三种类型的CCD各有优缺点,其中行间转移CCD不需要机械快门,速度最快,最适合用于观测快速运动的物体。本文设计了一种行间转移型面阵CCD的高速驱动电路。
1 行间转移型面阵CCD的结构和工作模式
本设计采用的是SONY公司的ICX415AL型号CCD芯片,ICX415AL是行间转移型面阵CCD,对角线为8 mm,尺寸为8.3 μmx8.3 μm,总像元素为823(H)×592(V),有效像元为782(H)x582(V)。它不仅具有高灵敏度、低暗电流的特性,而且还具有优秀的抗开花技术。ICX415AL还具有连续可变的电子快门功能,可以通过控制曝光时间,获得不用曝光条件下的图像。
ICX415AL的结构如图1所示。其中,感光单元与存储单元相邻排列,相当若干个单边传输的线阵CCD按垂直方向排列,在积分时间结束后,感光单元电荷转移到相邻的存储单元,在垂直转移脉冲V1,V2,V3的共同作用下一行一行的转移至水平移位寄存器,在水平转移脉冲H1,H2和复位脉冲RG的共同作用下经放大器读出。
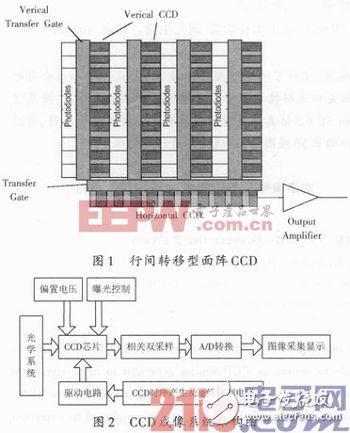
2 行间转移面阵CCD的驱动电路设计
整个电路设计如图2所示,它主要包括偏置电路、时序驱动电路、视频信号处理单元等。下面分别介绍这几个部分。
ICX415AL偏置电路设计包括电源电压以及各种驱动时序电压。经仔细分析得出,CCD的垂直转移信号电压为-7.5 V,0 V,15 V三个级次,水平移位信号和复位信号电压为5 V,基底信号电压为22.5 V,FPGA供电电压为3.3 V。综合CCD供电系统要求,选用24 V作为外部电压,使用YD12-24S15芯片获得15 V和-12 V电压,利用YDl6-24S05芯片获得5 V电压。分别将-12 V和5 V电压经过芯片LM2991和芯片LT1764EQ转换为-7.5 V和3.3 V电压,这样就获得了整个电路所需要的电压。
时序驱动电路的设计比较复杂,对成像效果至关重要,因此,时序驱动电路的设计是整个系统的关键。ICX415AL芯片有3种驱动模式:逐行扫描模式、场读出模式和中心扫描模式。其中逐行扫描模式具有较高的分辨率,且在29.5 MHz的时钟驱动下可以达到每秒50帧图像,满足设计的需要,因此本设计采用逐行扫描模式。在该模式下,CCD需要7个驱动信号,垂直转移时钟V1,V2,V3,水平转移时钟H1和H2,复位时钟信号RG,以及控制曝光时间的基底时钟SUB。CCD的一个周期包括感光阶段和转移阶段。在感光阶段,给基底提供一个时钟信号,在信号高电平期间,CCD处于偏置阶段,开始收集电荷,储存电荷的多少取决于外界光亮度以及曝光时间。当垂直转移时钟V1,V2,V3出现一个如图3所示的三相电平信号时,感光阶段结束,成像单元电荷以电荷包的形式转移到相邻的存储单元。转移阶段分为垂直转移和水平转移。垂直转移包含625个循环,每循环一次,电荷沿垂直方向移动一行,最后一行移入水平寄存器,然后在水平移位时钟H1,H2和复位时钟RG的作用下完成944个循环,每次循环输出一个像元信息。复位时钟RG用于将浮置扩散节点的电荷清除掉,以便能准确测量下一个点荷包。

视频信号处理单元主要完成预放、滤波、相关双采样(CDS)、后置放大以及A/D转换等功能。本文采用集成图像处理芯片VSP2230。VSP22 30是一款集成图像处理芯片,它可以对CCD输出信号进行相关双采样,具有可编程暗电平校正、可编程增益放大器(放大范围为-6~42 dB)、将模拟信号转换为十位的数字信号等功能。
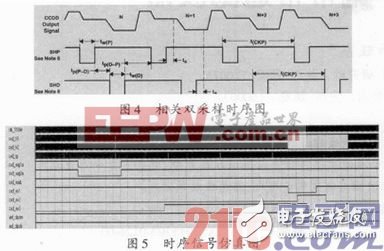
相关双采样(CDS)单元是对每个像元信号采样两次,分别获得参考电平和信号电平,将两个电平值的差作为CCD的输出信号,通过相关双采样可以滤除复位噪声、输出放大器的白噪声以及1/f噪声等。
具体模式见图4,在嵌位脉冲SHP的上升沿采集参考电平信号,在采用脉冲SHD的上升沿采集信号电平。SHP和SHD的位置很重要,对信号质量影响。很大,需要精细调整。ICX415AL芯片的每一行前端有3个哑像元,后端有38个暗像元,通过测量这些像元的电荷量,可以获得该款CCD的暗电平值,将上文的输出信号再减去暗电平值,就可去除暗电流噪声,输出更准确的信号。VSP2230芯片有两个引脚即用来完成该任务,即CLPDM和CPLOB引脚。
在CCD输出暗像元时,将CPLOB置为低电平,其他时候恒为高电平,在CCD输出哑像元时,将CLPDM置为低电平,其他时候置为高电平。
最后将模拟信号经A/D转换为10位数字信号,输出给FPGA,再经图像采集卡输出至显示设备,即可观看到视频图像。
3 波形仿真结果
本设计采用Altera公司的Cyclone系列的EP1C12F25617芯片,在QuartusⅡ9.1集成开发环境下,运用VHDL语言进行编程,利用Modelsim SE 6.5仿真工具进行仿真,如图5所示,时序满足芯片手册要求。
4 实验结果
将用VHDL语言编写好的程序下载到FPGA中,用示波器检测波形无误后,接上CCD芯片,将图像信号经LVDS采集卡采集后显示于电脑上,如图6所示,由图可知,该CCD成像系统成像效果良好,符合设计要求。
5 结论
在分析了SONY ICX415AL行间转移型面阵CCD的驱动时序的基础之上,提出了基于FPGA的驱动时序发生器的设计方案,并使用VHDL语言实现了该设计方案。整个设计充分结合了FPGA器件的设计简单、调试灵活、性能优越等优点和VHDL语言的硬件描述能力强、便于学习和理解等优点。该CCD相机具有每秒50帧的帧频,适用于观测高速运动的物体,成像效果良好,目前已运用于实际工程中。
-
高速面阵CCD KAI-01050功率驱动电路的设计方案2013-10-28 5354
-
面阵CCD结构图及工作过程分析2024-02-27 6250
-
请问生产DL32型面阵ccd的厂家是谁?2014-12-09 3045
-
行间转移型面阵CCD图像采集系统的研究2018-11-15 2898
-
15份CCD驱动的文献资料合集(基于FPGA、CPLD设计与实现)2019-06-03 3186
-
基于FPGA的行间转移面阵CCD驱动电路设计2009-12-26 511
-
全帧读出型面阵CCD光电传感器在图像采集中的应用2010-01-27 500
-
通用线阵CCD采集系统设计2010-03-13 2846
-
基于FPGA-SPARTAN芯片的CCD的硬件驱动电路设计2010-08-30 1676
-
TCD142D构成线阵CCD驱动电路2011-10-28 5077
-
基于ARM7与FPGA架构的面阵CCD图像采集系统的设计2016-08-29 643
-
基于FPGA的面阵CCD驱动传输电路设计2017-08-30 860
-
基于FPGA的高帧频面阵CCD驱动控制设计2017-11-18 2870
-
15份描述CCD驱动的文献资料合集免费下载2019-05-16 1150
全部0条评论

快来发表一下你的评论吧 !
