

惯性导航的工作原理及惯性导航系统分类
描述
惯性导航系统(INS)是一种自主式的导航设备,能连续、实时地提供载体位置、姿态、速度等信息;特点是不依赖外界信息,不受气候条件和外部各种干扰因素。
惯性导航及控制系统最初主要为航空航天、地面及海上军事用户所应用, 是现代国防系统的核心技术产品,被广泛应用于飞机、导弹、舰船、潜艇、坦克 等国防领域。随着成本的降低和需求的增长,惯性导航技术已扩展到大地测量、 资源勘测、地球物理测量、海洋探测、铁路、隧道等商用领域,甚至在机器人、摄像机、儿童玩具中也被广泛应用。
不同领域使用惯性传感器的目的、方法大致相同,但对器件性能要求的侧 重各不相同。从精度方面来看,航天与航海领域对精度要求高,其连续工作时间 也长;从系统寿命来看,卫星、空间站等航天器要求最高,因其发射升空后不可 更换或维修;制导武器对系统寿命要求最短,但可能须要满足长时间战备的要求 。涉及到军事应用等领域,对可靠性要求较高。
惯性导航 的工作原理
惯性导航系统是一种自主式的导航方法,它完全依靠载体上的设备自主地 确定载体的航向、位置、姿态和速度等导航参数,而不需要借助外界任何的光、 电、磁等信息。
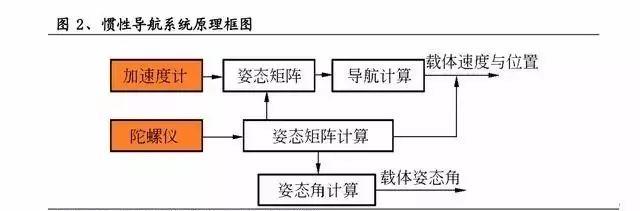
惯性导航是一门涉及精密机械、计算机技术、微电子、光学、自动控制、材料等多种学科和领域的综合技术。其基本工作原理是以牛顿力学定律为 基础,通过测量载体在惯性参考系的加速度、角加速度,将它对时间进行一次积 分,求得运动载体的速度、角速度,之后进行二次积分求得运动载体的位置信息 ,然后将其变换到导航坐标系,得到在导航坐标系中的速度、偏航角和位置信息等。 百度搜索“乐晴智库”,获得更多行业深度研究报告
惯性导航系统分类
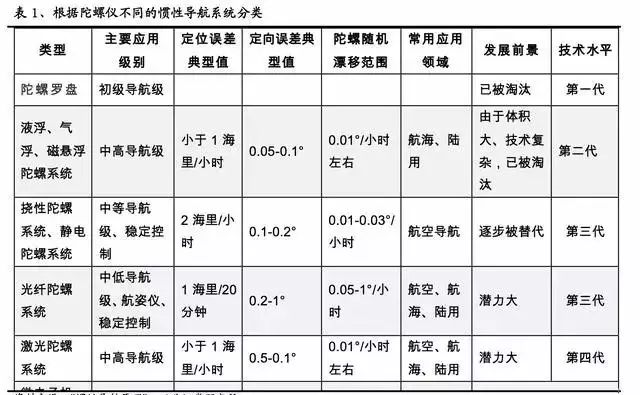
惯性导航系统根据陀螺仪的不同,可分为机电(包含液浮、气浮、静电、 挠性等种类)陀螺仪、光学(包含激光、光纤等种类) 陀螺仪、微机械(MEMS)陀螺仪等类型的惯性导航系统。
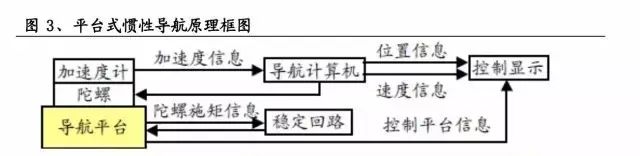
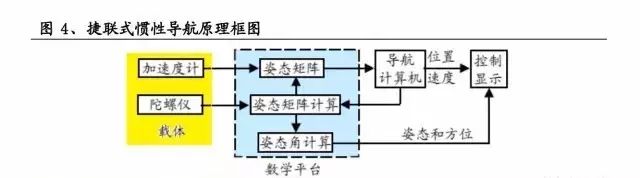
根据惯性导航系统 的力学编排实现形式又可以分为 :平台式惯性导航系统和 捷联式惯性导航系统。
平台式惯性导航系统是将陀螺仪和加速度等惯性元件通过万向支架角运动 隔离系统与运动载物固联的惯性导航系统。,其惯性测量装臵(加速度计和陀螺仪)安装在机电导航平台上,以平台坐标系为基准,测量运载体运动参数。平台式 惯性导航系统通过框架伺服系统隔离了载体的角运动,因此可以获得较高的系统精度。
捷联式惯性导航系统,其惯性测量装臵(加速度计和陀螺仪)直接装在飞 行器、舰艇、导弹等载体上,载体转动时,加速度计和陀螺仪的敏感轴指向也跟随转动。陀螺仪测量载体角运动,计算载体姿态角,从而确定加速度计敏感轴指向 。再通过坐标变换,将加速度计输出的信号变换到导航坐标系上,进行导航计算。
目前,平台惯导系统已经达到了很高的水平,但是其造价、维修费用十分 昂贵,而且其采用了框架伺服系统,相对可靠性将会下降。捷联式惯性导航技术是 20世纪 60 年代发展起来的,将惯性测量装臵直接安装在载体而非机电平台上,以数学平台代替机电式导航平台的导航技术,捷联系统惯性测量装臵便于安装 、维修和更换,体积小,是惯性导航技术的一个重要发展方向。但是,捷联系统 由于把惯性测量装臵直接固定在载体上,导致惯性测量装臵工作环境恶化,降低 了系统的应用精度。
惯性器件
惯性导航系统通常由惯性测量装臵、计算机、显示器等组成。惯性测量装 臵由两大核心惯性元器件组成:加速度计和陀螺仪。三个自由度的陀螺用来测量 飞行器的角加速度,三个加速度计用来测量飞行器的加速度,计算机通过测得的 角加速 度和加速度数据计算出飞行器的速度和位子数据。性能先进的惯性器件是 先进惯性导航系统的前提。
陀螺仪
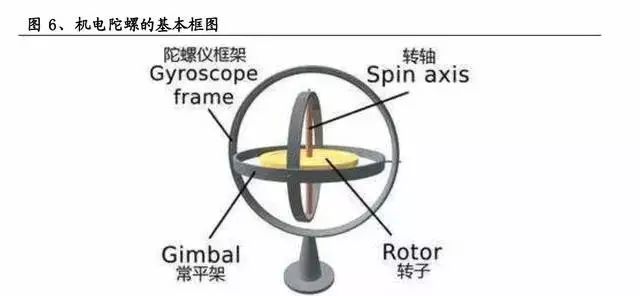
传统意义上的陀螺仪是安装在框架中绕回转体的对称轴高速旋转的物体。 陀螺仪具有稳定性和进动性,利用这些特性制成了敏感角速度的速率陀螺和敏感 角偏差的位置陀螺。由于光学、MEMS 等技术被引入于陀螺仪的研制,现在习惯上把能够完成陀螺功能的装臵统称为陀螺。

陀螺仪种类多样,按陀螺转子主轴所具有的进动自由度数目可分为二自由 度陀螺仪和单自由度陀螺仪;按支承系统可分为滚珠轴承支承陀螺,液浮、气浮 与磁浮陀螺,挠性陀螺(动力调谐式挠性陀螺仪),静电陀螺;按物理原理分为利用高速旋转体物理特性工作的转子式陀螺,和利用其他物理原理工作的半球谐振 陀螺、微机械陀螺、环形激光陀螺和光纤陀螺等。
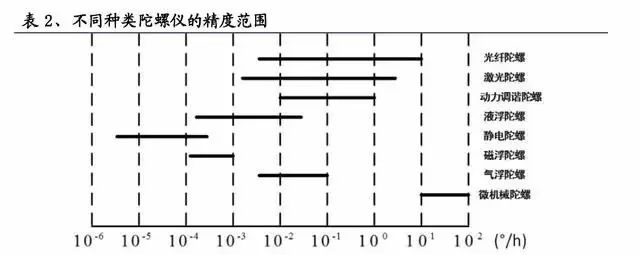
根据其精度范围大致分为超高精度陀螺仪、中高精度陀螺仪和低精度陀螺 仪。超高精度陀螺仪指精度范围在 10-6 o/h~5*10-4 o/h 范围内的陀螺仪,主要包括液浮陀螺、静电陀螺等,目前最高精度的陀螺仪是静电陀螺仪。中高精度陀螺 仪指精度在 5*10-4 o/h~10-1 o/h 的陀螺仪,目前最有发展前景的陀螺仪是光学陀螺仪,激光陀螺属于第一代光学陀螺,光纤陀螺属于第二代光学陀螺,最近几年 ,由于光纤陀螺在精度、性能和尺寸上具有更大的潜力,越来越受到各国军方的 青睐。低精度陀螺仪是指精度范围超过 10-1 o/h 的陀螺仪,目前发展前景较好的是MEMS 陀螺仪,虽然精度低,但低廉的价格使其具有广阔的应用前景。
机电陀螺
机电陀螺是传统的第一、二代陀螺仪,主要包括第一代液浮、气浮、磁悬浮陀螺,以及挠性、静电等第二代陀螺。机电陀螺的共同点在于转子都是安装在框 架中绕回转体的对称轴高速旋转,属于刚体转子陀螺仪,不同点在于支撑系统不 一样。第一代液浮、气浮、磁悬浮陀螺精度虽高,但结构复杂,制造困难、成本 很高。随着惯性导航系统的推广,尤其是在飞机上的广泛应用,寻求一种中高精 度、但结构简单、成本较低的陀螺成为当时迫切需要解决的问题。
挠性陀螺
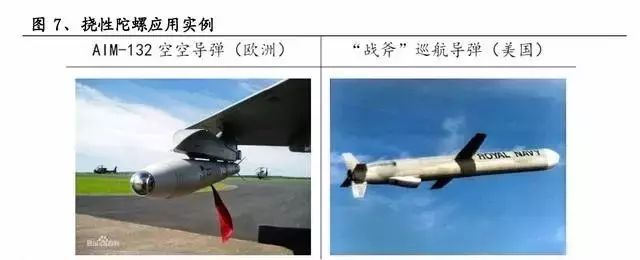
60 年代初,出现了一种新颖支撑原理的挠性陀螺解决了第一代陀螺仪的问题。挠性陀螺的转子利用挠性接头支撑,去除了支承轴上的摩擦干扰力矩,具有体积小、重量轻、可靠性高、成本低、能够消除支承摩擦的优点,目前应用范围广 泛,从平台式到捷联式,从飞机、导弹到舰船、航天飞行器均有所应用。
静电陀螺
静电陀螺是应用电场原理,在超真空的腔体内由静电场产生的吸力来支承 球形转子的一种自由转子陀螺,和挠性陀螺同属第二代陀螺仪。静电陀螺技术是 当今世界上最高精度的惯性技术,目前世界上只有美国、俄罗斯、法国和中国掌 握并成功地应用了这一技术。静电陀螺惯性系统价格昂贵、结构体积较为庞大, 一般应用在弹道导弹核潜艇或航空母舰上。
光学陀螺
光学仪器被用来测量地球的转动始于 1913 年法国物理学家 Sagnac 提出的 Sagnac效应,真正实用的激光陀螺在 1963 年研制成功。此后,基于 Sagnac 效应的光学陀螺迅速发展,激光陀螺和光纤陀螺是目前军事应用领域使用最广泛的陀 螺,以其为主要惯性器件的捷联惯性导航系统更是逐步取代成本高昂的基于机电 陀螺的平台式惯性导航系统和捷联式惯性导航系统。
加速度计
加速度计是惯性导航系统的另一核心元件。加速度计是用来感测运动载体 沿一定方向的比力的惯性器件,可以测量出加速度和重力,从而计算载体的速度和位臵。加速度计的分类:按照输入与输出的关系可分为普通型、积分性和二次积 分型;按物理原理可分为摆式和非摆式,摆式加速度计包括摆式积分加速度计、 液浮摆式加速度计和挠性摆式加速度计,非摆式加速度计包括振梁加速度计和静 电加速度计;按测量的自由度可分为单轴、双轴、三轴;按测量精度可分为高精 度(优于 10-4m/s2)、中精度(10-2 m/s2–10-3 m/s2)和低精度(低于 0.1m/s2)三类。
世界惯性导航市场的发展格局
世界惯性 导航的发展进程
由于陀螺仪是惯性导航的核心部件,因此,可以按各种类型陀螺出现的先 后、理论的建立和新型传感器制造技术的出现,将惯性技术的发展划分为四代。 惯性导航技术的发展历史如图表 19 所示,折线下方为该阶段建立的主要技术理论,上方为各阶段出现的惯性器件及其精度。不过,惯性技术发展的各阶段之间 并无明显界线。
世界惯性导航市场格局
美国国防部把从事惯性技术领域研究和开发的国家分为 4 个层次:属于第一层次的有美国、英国和法国;属于第二层次的有俄罗斯、德国、以色列和日本 ;属于第三层次的有中国、澳大利亚、加拿大、瑞典、乌克兰;属于第四层次的有韩国、印度、巴西***瑞士、意大利等。所谓第一层次就是完全具备自主研 究和开发惯性技术能力的国家,第二层次的国家是指具备大部分的自主研发能力的国家,第三层次的国家是指具备部分研发能力的国家,第四层次的国家是指具备 很有限的从事惯性技术研发能力的国家。
-
基于加速度计的无陀螺惯性导航系统的研究2009-12-02 0
-
捷联式惯性导航系统2016-08-17 0
-
深度解析惯性导航和GPS卫星导航结合的应用2018-03-26 0
-
GPS北斗卫星+惯性组合导航模块的优势分析2019-07-15 0
-
惯性导航系统、加速度计、陀螺仪的原理2020-05-18 0
-
详解GPS导航系统中的惯性技术2020-06-13 0
-
惯性导航模块特征和 优势有哪些?2020-08-13 0
-
求一款轮式小车惯性导航系统的设计方案2021-04-19 0
-
VxWorks在惯性导航系统中的应用2009-03-29 545
-
惯性北斗双星组合导航系统研究2009-12-16 717
-
惯性导航系统工作原理及应用2018-03-02 18130
-
基于FPGA的惯性导航系统设计2018-03-04 3239
-
惯性导航工作原理及系统分类2020-04-28 6252
-
惯性导航系统的优缺点2023-07-06 4974
-
一文详解导航系统的惯性技术原理2023-08-22 5436
全部0条评论

快来发表一下你的评论吧 !
