

 基于EtherCAT转Profinet网关接汇川伺服系统操作模式控制技术方案
基于EtherCAT转Profinet网关接汇川伺服系统操作模式控制技术方案
电子说
描述
在工业自动化范畴,不同协议设备间的通信常成为技术难题。本文围绕EtherCAT主站向Profinet网关转换以连接汇川伺服系统的操作模式控制展开,从硬件配置、参数设置到实际应用场景进行研究,为设备维护人员和自动化技术人员提供一套具有可实施性的技术方案。

一、通信架构的关键枢纽:网关的核心效能
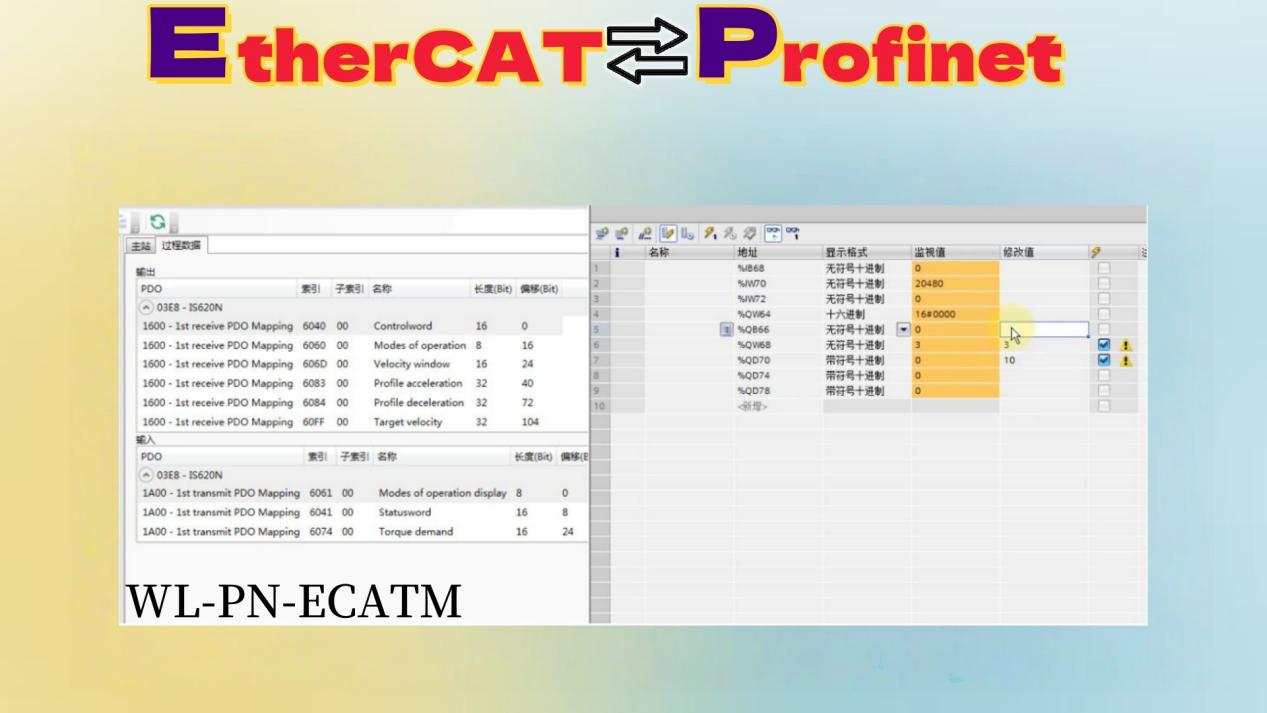
于工业通信范畴而言,EtherCAT协议与Profinet协议仿若两种别具一格的“通信语言”范式。EtherCAT协议以其极为突出的高速实时特性彰显优势,而Profinet协议作为通用性协议,在工业应用场景中获得了广泛的应用。通过运用EtherCAT转Profinet网关,能够实现PLC(诸如欧姆龙或西门子系列)与汇川伺服系统的数据联通。这一举措犹如在二者之间搭建起一座“数据通道”,既保证了EtherCAT协议的毫秒级响应能力,又可使系统融入Profinet网络的集中管理架构体系。

伺服控制模式解析:位置控制模式
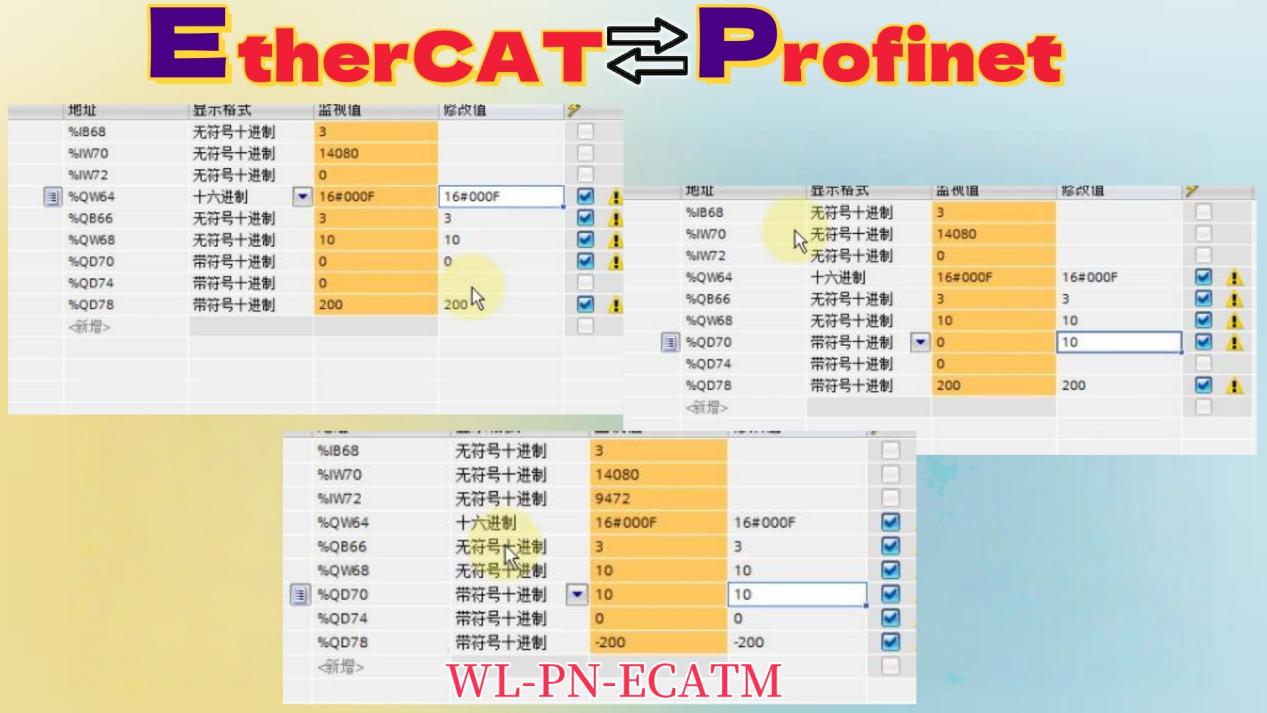
汇川伺服系统可支持位置、速度和转矩三种基础控制模式,且能借助EtherCAT转Profinet网关灵活实现模式切换。其中,位置控制模式(精准导航)在伺服控制中具有重要意义。
应用场景:物料分拣机械臂的精确点位抓取操作

参数配置:
运用Profinet通信手段传输目标脉冲数量(譬如,10000个脉冲对应的位移距离为10厘米) ,进行加减速曲线的设定(采用S型曲线可削减机械冲击,与汽车实现平稳启动的原理相仿) ,关键参数:电子齿轮传动比(应与机械减速器传动比相适配) 。
通过采用EtherCAT转Profinet网关技术实现汇川伺服系统的集成,不仅能够克服不同通讯协议之间的技术障碍,而且能够充分利用伺服驱动器的动态响应特性。随着工业4.0技术的不断推进,此类异构网络的整合方案预期将成为智能工厂建设中的标准配置。掌握该技术的设备维护团队将能够显著提高生产线的灵活性,类似于为机械设备配备了“智能导航系统”,在自动化技术的浪潮中实现精准的控制与管理。
-
EtherCAT转Profinet网关与汇川伺服系统集成及轮廓模式应用解析2025-07-23 945
-
EtherCAT转Profinet网关在汇川伺服转矩控制中的集成应用与实现2025-07-13 971
-
EtherCAT主站转Profinet网关接汇川伺服实现速度控制功能2025-07-10 814
-
EtherCAT主站转Profinet网关接汇川伺服操作模式的控制解析2025-07-09 842
-
基于EtherCAT转Profinet网关接汇川伺服系统操作模式控制技术方案jf_69310483 2025-07-04
-
EtherCAT转CANopen网关与伺服器在汇川组态软件上的配置步骤2025-06-12 1857
-
EtherCAT主站转Profinet网关接IS620N伺服驱动器与西门子plc通讯案例2025-06-09 1353
-
号外!PLC安川伺服,通过Profinet转EtherCAT网关同步多个工作站2025-06-07 941
-
CANOpen转PROFINET网关连接低压伺服系统2025-03-24 1346
-
PLC与伺服完美融合:Profinet转EtherCAT网关配置详解2024-04-09 1768
-
通过Profinet转EtherCAT网关将伺服驱动与Profinet通讯2024-01-16 1649
-
应用案例丨通过Ethercat转profinet网关控制科尔摩根驱动器2023-05-20 1348
-
应用案例丨伺服驱动器连接Ethercat转profinet网关2023-05-18 2273
全部0条评论

快来发表一下你的评论吧 !
