

DELTA机械手多物料视觉分拣的应用
电子说
描述
市场应用背景
近年来,制造业对智能机器人的需求显著增长,DELTA机器人凭借结构紧凑、运行速度快、占地面积小等优势成为重要解决方案。作为高速轻载型并联机器人,其通过示教编程或视觉系统识别目标物体位置,由三组并联伺服轴精准控制抓取中心(TCP)的空间位姿,高效完成搬运、分拣等任务,广泛应用于食品、五金、电子等行业。

当前市场中,由DELTA机械手、机器视觉与柔性振动盘深度集成的上下料工作站(业界俗称“柔性三兄弟”)已成为典型解决方案。该方案通过视觉系统精准引导机械手协同作业,为小批量、多样化产品的自动化分拣提供了高兼容性支持,并针对性解决了传统铝制振动盘的关键缺陷:仅支持单款产品上料、投入成本高以及通用性差。
正运动技术多物料分拣解决方案优势
正运动技术方案通过深度整合VPLC系列视觉运动控制一体机与RTFuse视觉系统。其核心价值可归纳为:
1. 高度集成化的一站式架构
软硬件一体化设计,实现即插即用的部署模式;
2. 多场景兼容的柔性能力
满足单一物料高速抓取的标准化需求;
突破性支持多品类物料混合识别与同步分拣(如混料识别、差异化抓取)。
3. 生产效能的本质提升
单台设备即可完成多类型物料的分选、定位、摆盘全流程;
强化柔性生产响应能力,快速适应小批量多品种订单。

01 DELTA机械手视觉多物料识别解决方案的分拣应用
DELTA机械手视觉多物料分拣运行视频可点击→“DELTA机械手视觉多物料分拣解决方案”查看。
正运动DELTA视觉多物料分拣解决方案架构

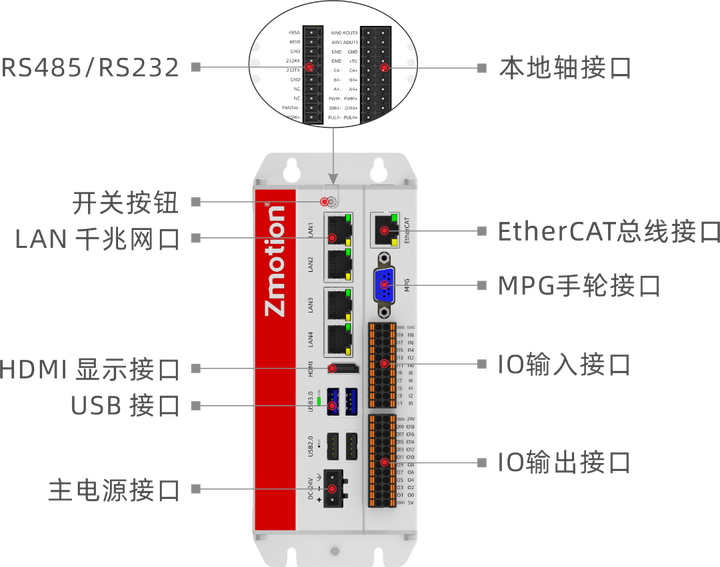
20DI:启动/复位/停止按钮、负压检测、原点信号等;
20DO:相机触发、破/吸真空、三色灯蜂鸣器、机器人报警等;
EtherCAT接口:接EtherCAT总线驱动器,控制DELTA并联机械手;
4路单端脉冲输出:接步进/脉冲驱动器、编码器轴;
ETHERNET接口:千兆网口,接支持Gige协议的面阵相机,实现视觉定位、纠偏。
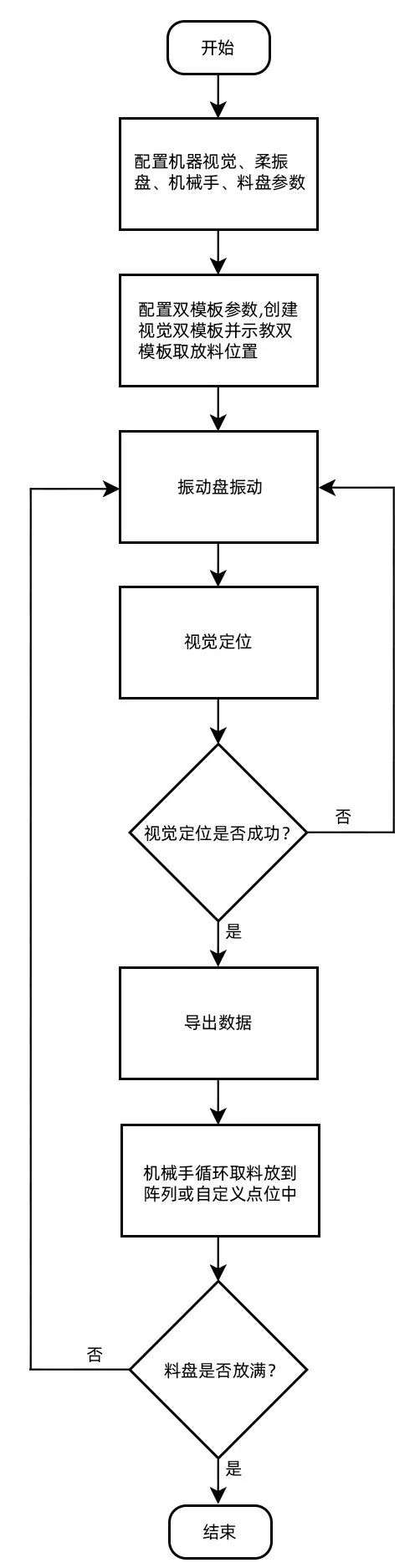
DELTA视觉多物料分拣流程
运动控制与机器视觉实现过程
| 机器视觉
RTFuse视觉系统预先建立多款待分拣物料的视觉模板。系统通过上置相机对柔性振动盘进行视觉定位,识别并定位盘中的多种物料。DELTA并联机械手根据获取的视觉定位数据,执行柔性振动盘内的物料分拣或分类摆盘任务。 对于精度要求更高的产品,可增配下置相机。机械手在柔性振动盘取料后,利用下相机进行动态二次定位,实现精度补偿。 视觉定位主要用到形状匹配功能,通过预设的形状、尺寸、Mark点等特征,实现目标物料的匹配定位。通过坐标系校准,将物料的世界坐标传送给DELTA并联机械手。

▲ RTFuse视觉流程 ▲

▲ 简易视觉模板创建 ▲
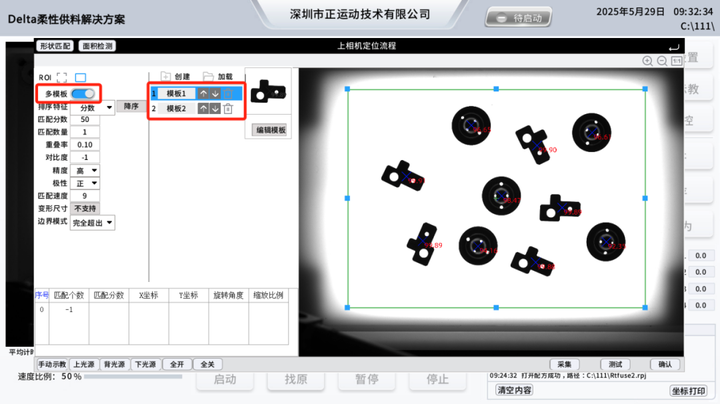
▲ 视觉多模板设置 ▲
| 运动控制
柔性振动盘接收供料器输入的零散物料。控制器通过RS485通讯触发振动盘振动,使物料在盘面均匀分布。 每次振动后,DELTA并联机械手依据视觉定位系统提供的坐标数据,沿预定义轨迹(用户可通过快速示教设定拾取、放置、拍摄等点位)移动,依次抓取物料并将物料精准放置至目标工位。 若当前无可抓取的物料时,系统将自动触发振动盘再次振动散料,直至检测到可抓取物料。此循环抓取-振动流程持续运行,直至料盘满载。

▲ 柔振盘参数设置 ▲

▲ 工艺动作类型选择 ▲

▲ 标定与供料设置 ▲
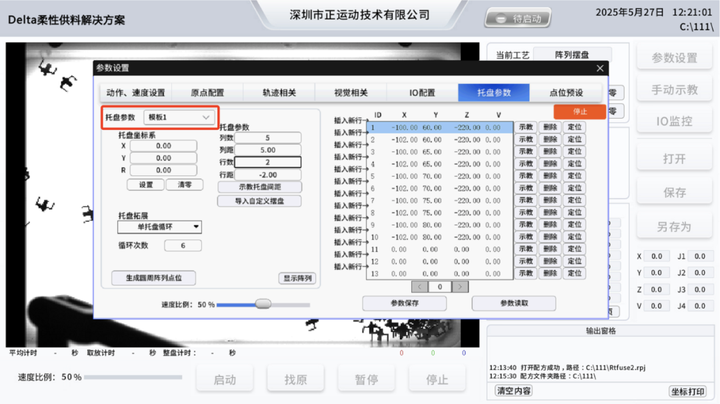
▲ 视觉模板1(产品1托盘位置示教) ▲
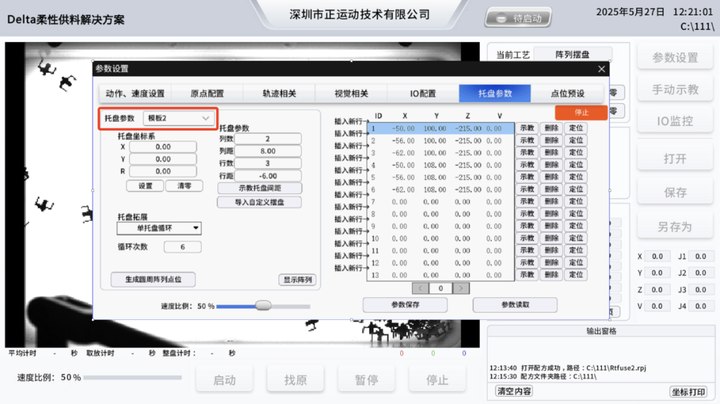
▲ 视觉模板2(产品2托盘位置示教) ▲
方案应用优势
技术门槛低:拖拽式中文组态视觉,应用工程师经过简单培训可轻松上手;
项目开发周期快:成熟的视觉机械手视觉分拣解决方案,减少用户开发时间成本;
软硬件集成性强:集成EtherCAT总线、脉冲混合控制,机器视觉、运动控制、集软硬于一体易于设备调试与排除问题;
降低企业用人成本:一人即可调试设备的运动控制、视觉、IO逻辑控制等,解决工程人员流失、用人成本高等问题;
柔性化生产:系统可保存多个物料的视觉和运控配置程序,一键完成工艺包切换。可灵活处理不同尺寸和形状的工件,无需频繁更换硬件,降低产线停机时间。
解决方案硬件配置

02 VPLC712机器视觉运动控制一体机
正运动技术VPLC712机器视觉运动控制一体机是一款基于x86架构的EtherCAT总线视觉运动控制器,采用一体化设计,将实时机器视觉、运动控制、IO和监控集成于一台多核控制器上,实现多任务并行实时处理自动化设备任务,通过共享内存机制,将PC部分硬件资源通过MotionRT750进行配置,实现核内高速交互,驱动执行器进行对应操作,完成设备整体的控制。 VPLC系列机器视觉运动控制一体机的安装与拆卸过程便捷,占地空间小,还能与其它控制单元部件(如伺服驱动器、传感器、编码器、控制阀等)无缝集成,提供一个完整端到端的视觉运动控制解决方案。
VPLC712机器视觉运动控制一体机,本身最多支持64轴,EtherCAT最小通讯周期可达到250us;板载20数字输入,20数字输出以及4路高速锁存输入;板载2路本地差分脉冲轴、2路AD和2路DA。 03 RTFuse视觉多物料分拣应用

正运动针对市场需求,特此基于VPLC系列的视觉运动控制一体机开发了RTFuse视觉对位贴合解决方案,通过点位示教与RTFuse视觉组态的结合,实现一站式、快速开发对位贴合设备,有效缩短项目周期,操作员通过简单调整视觉、运动控制功能模块参数,即可在最短时间内完成物料转换,实现高速高精的机械手对位贴合。
▌相机支持
支持市面上大部分主流相机,支持4个相机并行采集、视觉飞拍。
▌快速配置
机械手、轴组、飞达供料、相机和矩阵取料、工具参数。
▌示教功能
提供取料、飞拍及放料路径等多个点位的一键示教功能。
▌坐标校准
支持相机标定,包括修改XY坐标方向和世界坐标位置补正。
▌走位标定
通过示教好的运动点位,一键即可完成自动标定。
▌系统切换
可切换至RTFuse视觉组态系统,实现视觉检测流程。
▌可视化界面
界面友好,便于用户数据监控,实时显示使能状态、回原状态、定位数量和摆放计数等。
▌支持机械手类型
4轴模组、SCARA机械手、DELTA并联机械手、直角坐标机械手、6关节等。
为了帮助您更好地、更快速的开发和应用DELTA并联机械臂的视觉多物料识别柔性摆盘解决方案,我们为运动控制模块准备了详细的说明文档和源代码。进一步了解其使用方法、参数配置及实际应用案例,联系电话400-089-8936。
审核编辑 黄宇
- 相关推荐
- 热点推荐
- 运动控制器
- 运动控制
- EtherCAT总线
-
机械手 OEM 的应用2024-09-18 1022
-
正运动DELTA机械手多物料视觉分拣解决方案 #正运动技术 #运动控制 #机器视觉运动控制一体机 #正运动正运动技术 2025-06-24
-
深圳机械手视觉分拣系统在手机盖板的应用2021-05-18 826
-
湖北视觉分拣机械手系统在手机盖板的应用2021-08-11 1268
-
深圳机械手视觉分拣系统有哪些特点及参数?2021-09-22 1223
-
基于 CAN 总线的机械手控制系统The Control S2009-06-03 633
-
基于PLC的机械手混合驱动控制2011-08-15 1279
-
机械手图册——机械手设计必看2018-02-01 2594
-
基于SJA1000芯片和82C250芯片实现机械手控制系统的设计2020-05-17 2560
-
基于机器视觉的机械手装配系统方案设计2020-06-23 4591
-
EtherCAT运动控制器Delta机械手应用2024-05-09 3332
-
C#之Delta并联机械手的视觉同步分拣2024-07-03 2434
-
机器视觉控制机械手的具体过程2024-07-04 2275
-
机器视觉运动控制一体机在DELTA并联机械手视觉上下料应用2024-10-24 2115
-
运动控制模块:Delta机械手柔性上下料开发零门槛!2025-05-23 1027
全部0条评论

快来发表一下你的评论吧 !
