

舵机如何控制_舵机原理是什么
电子常识
描述
舵机工作原理
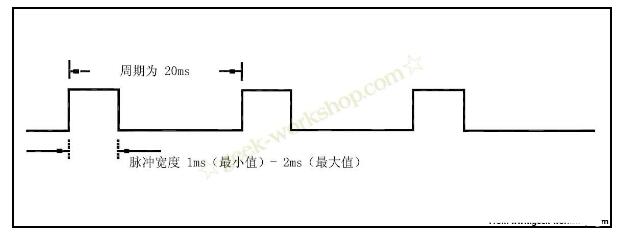
舵机的伺服系统由可变宽度的脉冲来进行控制,控制线是用来传送脉冲的。脉冲的参数有最小值,最大值,和频率。一般而言,舵机的基准信号都是周期为20ms,宽度为1.5ms。这个基准信号定义的位置为中间位置。舵机有最大转动角度,中间位置的定义就是从这个位置到最大角度与最小角度的量完全一样。最重要的一点是,不同舵机的最大转动角度可能不相同,但是其中间位置的脉冲宽度是一定的,那就是1.5ms。如下图:
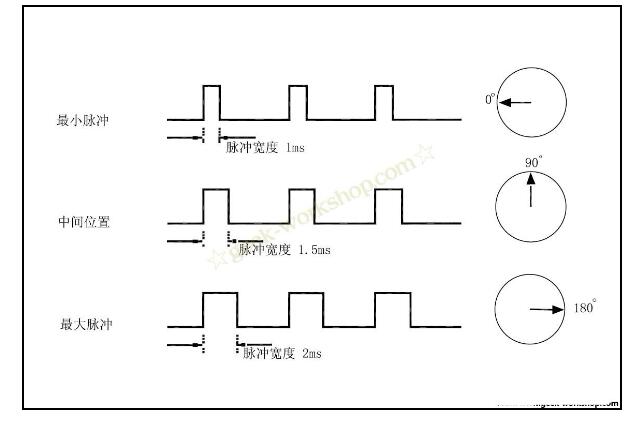
角度是由来自控制线的持续的脉冲所产生。这种控制方法叫做脉冲调制。脉冲的长短决定舵机转动多大角度。例如:1.5毫秒脉冲会到转动到中间位置(对于180°舵机来说,就是90°位置)。当控制系统发出指令,让舵机移动到某一位置,并让他保持这个角度,这时外力的影响不会让他角度产生变化,但是这个是由上限的,上限就是他的最大扭力。除非控制系统不停的发出脉冲稳定舵机的角度,舵机的角度不会一直不变。
当舵机接收到一个小于1.5ms的脉冲,输出轴会以中间位置为标准,逆时针旋转一定角度。接收到的脉冲大于1.5ms情况相反。不同品牌,甚至同一品牌的不同舵机,都会有不同的最大值和最小值。一般而言,最小脉冲为1ms,最大脉冲为2ms。如下图:
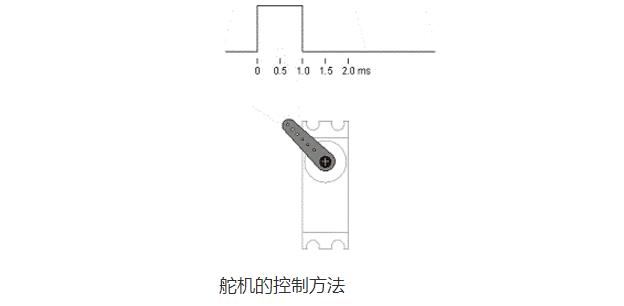
舵机的控制方法
舵机一般用单片机或者数字电路控制。舵机工作主要跟控制线的高电平持续时间有关系,一般按0.5ms(毫秒)划分,如果持续时间为0.5ms,1ms,1.5ms,2ms,2.5ms时,舵机会转过不同的角度。
舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms~2.5ms范围内的角度控制脉冲部分。以180度角度伺服为例,那么对应的控制关系是为:脉冲 设置为 0.5ms旋转角度为0度;脉冲 设置为 1.0ms旋转角度为45度;脉冲 设置为 1.5ms旋转角度为90度;脉冲 设置为 2.0ms旋转角度为135度;脉冲 设置为 2.5ms旋转角度为180度。
舵机的速度控制
对于180度舵机:
舵机的转动速度取决于起始角度和目标角度的差,差别越大转得越快,当接近时就放慢角度。所以没有专门的函数控制转速。但在大角度转动时,你可以用程序把它设成几个小角度递进,这样可以放慢速度。也通过delay进行慢速,但快速的话只有加高电压了 。
对于360度舵机:
write()或者writeMicroseconds()的参数决定舵机的速度,但也可以通过delay()或者delayMicroseconds()来减速。
-
 涵攂1234
2018-11-30
0 回复 举报谢谢 ,很详细 收起回复
涵攂1234
2018-11-30
0 回复 举报谢谢 ,很详细 收起回复
-
#电子爱好者 #电子制作 #电子技术 #电机 #物联网 #单片机 #舵机控制 #舵机 #无线控制硬工坊 2025-11-21
-
舵机怎么控制正反,舵机怎么使用?2025-08-19 3809
-
【RA-Eco-RA4E2-64PIN-V1.0开发板试用】+02+舵机控制+串口通讯2024-12-18 1655
-
基于RT-Studdio开发板实现触摸按键控制舵机的设计2023-04-03 1454
-
舵机的工作原理是什么2022-02-24 1436
-
MG996R与MG995R舵机简析2022-01-20 7946
-
STM32mini板 红外遥感控制 舵机小车 初学者适用2021-12-31 1077
-
基于stm32c8t6和mpu6050的三轴云台控制2021-12-06 1091
-
舵机的原理是什么?控制舵机的方法有哪些?2021-09-27 9679
-
降压模块OLED屏幕按键舵机开发板MPU-6050实验概述2021-08-03 1898
-
舵机怎么控制正反_舵机怎么使用2020-03-21 28624
-
舵机控制原理是什么_舵机的控制方法2018-05-30 148029
-
[Micropython]TPYBoard v10x 驱动舵机教程2018-04-13 2585
全部0条评论

快来发表一下你的评论吧 !
