

新品首发!电应普C01水声通信模组发布,连接水下世界
描述
泳池清洁机器人进入消费级无线通信时代!
在泳池清洁领域,高效与智能是永恒的追求。我们全新推出的泳池清洁机器人C01水声通信模组,以尖端科技打破水下通信壁垒。
该模组采用先进的水声通信技术,实现机器人与控制终端间稳定、高效的数据传输,无论是遥控控制水下机器人、泳池水质监测数据传输,机器人故障预警信息还是机器人自动回归路径优化,都能实时精准传递,让清洁作业更智能、更高效。
行业市场痛点
传统通信技术水下失效:射频(RF)和蓝牙等传统通信技术在水下环境存在严重局限性。例如,射频信号在水中衰减极快,每传播1米,信号强度可能衰减30 - 40dB,导致在水下0.5米后通信基本失效。而使用光通讯只能单方向发信息,还需要位置校对才可进行,使用及其不便。
用户操作成本量化:当泳池清洁机器人在水下出现问题时,由于通信不畅或设备无通信功能,用户手动打捞机器人耗时较长。极大增加了用户的操作成本。
而水声通讯水声通信系统基于超声波调制解调技术,在水下信号传播速度快损耗少,具备全水层覆盖能力实现水下360°通信。
消费级水声通信模组
行业内水声通信的相关研究其实已经开展了多年,到目前为止,现有的水声通信模组大多体积巨大并且成本高昂,他们并不适合在日常消费和商业应用中采用。
电应普C01模组首次将水声通信带入消费级应用门槛。
单个模块其尺寸只有乒乓球大小,可以非常方便的安装在各类设备当中。
C01功能矩阵
遥控功能:使用手机通过遥控,控制机器人实现行走/拐弯/后退/回归基站,最快300ms响应时间,确保在机器人出现异常情况时可以通过人工接管快速反应。
状态反馈:当机器产生故障,通过水声通信可以传输机器人故障代码。这样用户能及时了解机器人的工作状态,以便快速做出处理。
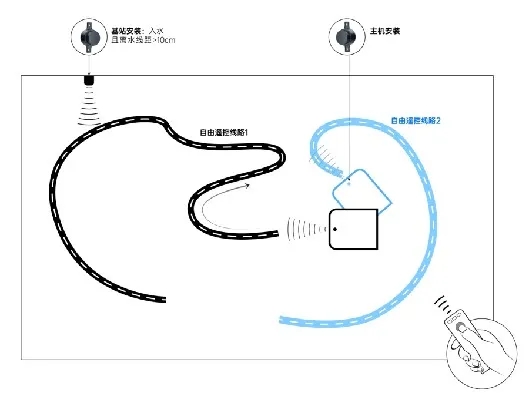
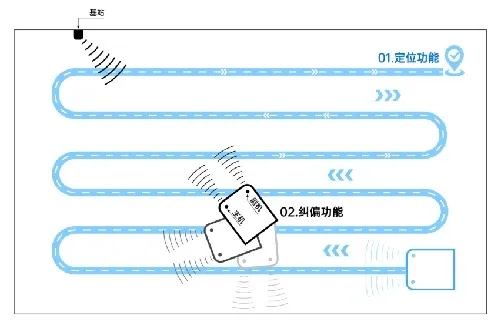
定位:模组定位功能可以获取基站模组与主机模组之间的距离值,可用于水下机器人的导航,返航,路径规划等。
纠偏:水声通信模组可以提供机器人与基站之间的偏移角度,从而实现机器人返航的最优路径设计。
核心参数性能
| 产品型号 | DYP-C01A(双模组) | DYP-C01B(三模组) |
| 模组功能 | 遥控,多字节 | 遥控、多字节、定位、纠偏 |
| 工作电压 | 5V±5% | 5V±5% |
| 待机电流 | <18mA | <18mA |
| 平均工作电流 | <30mA | <30mA |
| 最大通信距离 | 1~2000cm | 1~2000cm |
| 通信角度 | 360deg | 360deg |
| 通信时延 | 最小300ms | 最小510ms |
| 通信字节 | 1~7Byte | 1~7Byte |
| 定位精度 | - | 3+S*1%cm |
| 输出方式 | UART受控、 RS485 | UART受控、 RS485 |
| 防护等级 | IP68,耐水压5m@168H | IP68,耐水压5m@168H |
预定方式
目前C01模组将优先针对行业客户提供预定和样品,如果您对C01模组感兴趣,请联系我们。同时请备注您的公司、职务、期望的应用等信息。
-
超声波水下测距换能器:探索水下世界的“千里眼”2025-06-26 3828
-
基于OPNET的水声通信网MAC层协议的研究2010-04-24 2231
-
水声的水下无线通信研究2011-03-17 1088
-
水声通信技术的发展及特性分析2020-03-29 13547
-
水声通信技术的发展历程及与无线电通信的区别2020-07-15 1817
-
水声功率放大器的应用:潜艇水下通信方式2021-11-05 5227
-
什么是水声换能器?2021-12-27 2571
-
水下通信系统中水声功率放大器的驱动应用2022-02-18 2061
-
水声功率放大器应用:潜艇水下通信方式2022-11-01 2257
-
DS1307Z+T&R/C01 时钟/定时 - 实时时钟2022-11-22 89
-
DS1100LZ-20/TR/C01 时钟/计时 - 延迟线2022-11-30 91
-
水下通信技术的分类、特征、应用2023-05-19 1386
-
78M6610+PSU/C01 - (Maxim Integrated) - PMIC - 能量计量2023-08-22 90
-
ATA-L50水声功率放大器:可驱动水声换能器,可用于水下通信测试2024-01-15 1370
-
深海通信不“失联”?这款超声波换能器打破水下信息壁垒!2025-12-22 745
全部0条评论

快来发表一下你的评论吧 !
