

ROS开发技术的twist_mux功能包的原理和使用方法,灵活使用锁配置
电子说
描述
twist_mux的原理类似于RTOS中的任务调度,需要为每个输入的话题设置优先级,不同话题也可以设置为同样的优先级,但是并不推荐这样做。除了优先级机制外,twist_mux还可以根据超时限制、外部锁话题(lock topics)来限制输入话题的选择。
我们在做机器人ROS开发时,常常会遇到相同速度控制消息的选择问题。比如说控制机器人移动的geometry_msgs::Twist消息,可以使用键盘节点发布,可以使用手柄节点发布,也可以在导航过程中由movebase发布,那么这些节点同时运行时,多个节点发布相同的速度控制话题,这个时候机器人就迷茫了,到底该听谁的呢?只能收到哪个数据就听谁的。
针对这样的问题,ROS提供了一种mux多路切换器——twist_mux,可以帮助我们切换到希望接收的数据源上。
— 原理 —
正如我们开篇描述的场景,当机器人接收到不同节点发布的速度控制消息时,该如何进行选择呢?
回想一下RTOS中的任务调度原则,每个任务都有自己的优先级,当有多个任务进入等待状态时,系统会选择优先级最高的任务执行,很多系统还支持同等优先级的任务,此时系统会按照时间片轮询的方式执行任务,也就是不偏不倚,平等对待相同优先级的任务。
twist_mux的原理类似于RTOS中的任务调度,需要为每个输入的话题设置优先级,不同话题也可以设置为同样的优先级,但是并不推荐这样做。
除了优先级机制外,twist_mux还可以根据超时限制、外部锁话题(lock topics)来限制输入话题的选择。
twist_mux功能包中的核心节点就是twist_mux,其输入、输出如下:
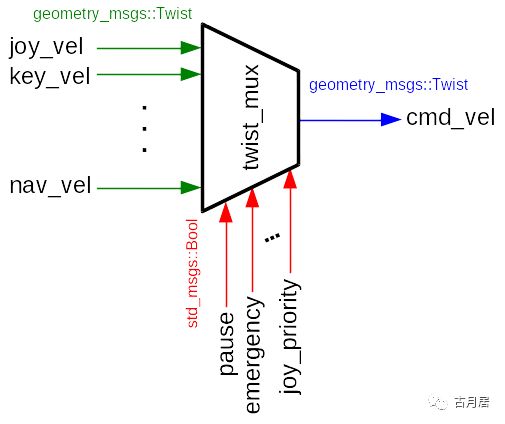
左侧输入的是多个geometry_msgs::Twist类型的话题,通过twist_mux的选择后,输出唯一的geometry_msgs::Twist话题。下方输入的话题就是用户动态配置选择机制的锁话题,话题的消息类型是Bool,正如锁一样,只有打开和关闭两种状态。
这里锁的概念可以理解为:通过限制不同优先级的输入源,达到控制输出的效果。
— 配置 —
twist_mux功能包的安装一句话就可以搞定:
sudo apt-get install ros-indigo-twist-mux
然后就可以运行多路切换器了:
roslaunch twist_mux twist_mux.launch
打印当前的话题列表可以看到:
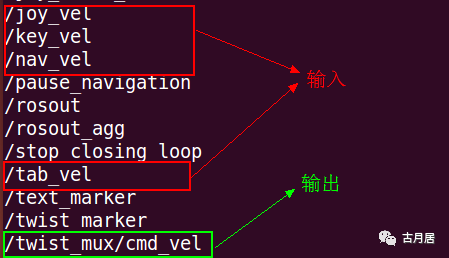
再来看一下twist_mux.launch文件里边到底干了啥:
可以看到,在launch文件中配置了一些话题名参数,在启动twist_mux节点的过程中还加载了两个配置文件,twist_mux_topics.yaml对应的就是输入话题的配置,twist_mux_locks.yaml对应的是锁话题的配置。
1. twist_mux_topics.yaml
# Input topics handled/muxed.# For each topic:# - name : name identifier to select the topic# - topic : input topic of geometry_msgs::Twist type# - timeout : timeout in seconds to start discarding old messages, and use 0.0 speed instead# - priority: priority in the range [0, 255]; the higher the more priority over other topicstopics:- name : navigation topic : nav_vel timeout : 0.5 priority: 10- name : joystick topic : joy_vel timeout : 0.5 priority: 100- name : keyboard topic : key_vel timeout : 0.5 priority: 90- name : tablet topic : tab_vel timeout : 0.5 priority: 100
该配置文件中包含了一个输入话题的配置列表,每个输入话题的配置项包含以下几个:
name:一个用户可读的命名,不是话题名,只用于调试显示;
topic:话题名,话题必须是geometry_msgs::Twist类型;
timeout:消息允许的超时限制,超过此时间仍然没有数据后,会切换到其他输入话题上,如果设置为0的话,相当于没有限制,会无限等待;
priority:输入话题的优先级,0~255之间,值越大优先级越高
2. twist_mux_locks.yaml
# Locks to stop the twist inputs.# For each lock:# - topic : input topic that provides the lock; it must be of type std_msgs::Bool?!!!# - timeout : == 0.0 -> not used# > 0.0 -> the lock is supposed to published at a certain frequency in order# to detect that the publisher is alive; the timeout in seconds allows# to detect that, and if the publisher dies we will enable the lock# - priority: priority in the range [0, 255], so all the topics with priority lower than it# will be stopped/disabledlocks:- name : pause topic : pause_navigation timeout : 0.0 # Same priority as joystick control, so it'll not block it. priority: 100- name : loop_closure topic : stop_closing_loop timeout : 0.0 priority: 200- name : joystick topic : joy_priority timeout : 0.0 priority: 100
关于锁话题的配置也是一个列表,每一个子项都是一个锁话题的配置,配置项包含以下几个:
name:一个用户可读的命名,不是话题名,只用于调试显示;
topic:锁话题名,消息类型必须是std_msgs::Bool 类型;
timeout:锁话题需要按周期发布,所以超过时间限制后,会认为发布锁的节点掉线了,锁失效,类似于看门狗的功能;如果设置为0的话,则没有超时限制,持续有效;
priority:限制输入话题的优先级,0~255之间,在此值以下优先级的话题,会被上锁,开锁之前无法输出,以达到动态控制输出的效果。
— 实践 —
现在我们就来通过实践验证一下twist_mux的效果。
首先启动twist_mux节点:
roslaunch twist_mux twist_mux.launch
然后监听最终输出的速度控制消息:
rostopic echo /twist_mux/cmd_vel
1. 多输入源的选择
目前还没有任何输入,所以还不会有输出的消息。
接着我们就可以发布几个输入的消息了,先发布一个导航输出的速度消息:
rostopic pub -r 10 /nav_vel geometry_msgs/Twist "linear: x: 1.0 y: 0.0 z: 0.0angular: x: 0.0 y: 0.0 z: 0.0"
成功发布之后,输出监听并没有任何输出,这是因为在锁消息中,我们设置的最小优先级是100,而nav_vel的优先级在配置文件中设置的是10,自然被挡到了门外,没办法输出。
再来发布joy_vel消息:
rostopic pub -r 10 /joy_vel geometry_msgs/Twist "linear: x: 2.0 y: 0.0 z: 0.0angular: x: 0.0 y: 0.0 z: 0.0"
很快就可以在输出监听的终端中看到如下图所示的joy_vel的消息了:
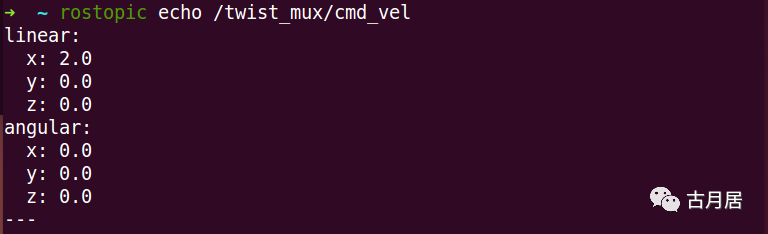
此时有nav_vel和joy_vel两个输入消息,经过twist_mux的选择后,只输出了joy_vel消息。
那么如果我们想要输出nav_vel怎么办呢?
在nav_vel和joy_vel两个消息保持发布的状态下,重新打开一个窗口,关闭优先级门槛的限制:
rostopic pub /joy_priority std_msgs/Bool "data: false"
此时如果joy_vel消息停止或者超时的话,twist_mux就会自动切换到nav_vel输出,我们可以直接kiil掉joy_vel的话题发布,输出监听的终端就会显示nav_vel消息的数据了:

2. 停止某优先级以下的输入源
如果我们想要暂停输出,怎么办呢?锁消息中也设置了暂停nav_vel的话题:
rostopic pub /pause_navigation std_msgs/Bool "data: true"
现在nav_vel话题就暂停了,想要恢复的话,只需要再发布一次pause_navigation消息即可:
rostopic pub /pause_navigation std_msgs/Bool "data: false"
需要注意的是,/pause_navigation话题设置的优先级和joy_priority是一样的,所以这里的暂停无法暂停优先级100及以上的话题,所以并不会影响joy_vel消息的转发。
我们还在锁配置中设置了一个优先级为200的控制锁,一旦我们生效这个锁,优先级200以下的话题都会停止转发:
rostopic pub /stop_closing_loop std_msgs/Bool "data: true"
现在所有话题都无法通过twist_mux输出了。
OK,现在我们应该已经明白了twist_mux功能包的原理和使用方法,灵活使用锁配置,可以让我们轻松控制多个输入源的切换。
-
如何使用menuconfig添加配置micro-ros软件包?2025-09-25 268
-
电脑键盘锁功能及使用方法简介2011-12-30 6411
-
MQTT软件包的配置参数和使用方法2021-03-30 3374
-
为ROS navigation功能包添加自定义的全局路径规划器(Global Path Planner)2021-05-16 4941
-
通过将小车接入MicroROS完成了一个遥控小车的开发2023-03-27 1712
-
NVIDIA Isaac ROS GEM的功能特性2022-08-14 2674
-
交换机最基本的配置与使用方法2023-01-04 10113
-
ROS Navigation Stack的整体设计思路和功能包2023-02-01 2739
-
ROS部署PaddlePaddle的CV模型2023-10-20 1791
-
ROS中如何设置消息信息2023-11-15 1413
-
ROS的扩展有哪些方法2023-11-21 1598
-
如何配置ROS驱动功能包2023-11-22 3637
-
在TogetherROS中如何安装ROS2功能包2023-12-01 3092
-
创龙 瑞芯微 RK3588 国产2.4GHz八核 工业开发板—ROS2系统使用说明2025-10-30 844
-
初识ros2 功能包建立与可执行文件的配置2026-01-22 755
全部0条评论

快来发表一下你的评论吧 !
