

TuyaOpen开源框架+地瓜RDK X5开发板=激光雷达避障、人体追踪的智能小车
描述
OriginBot 是一款智能机器人开源套件,搭载地瓜 RDK X5 开发板,通过完全开源的 TuyaOpen 开发框架,能够实现激光雷达避障、智能联网、目标检测、人体追踪、手势识别、视觉巡线等功能。该套件集成丰富接口,自带 4 个 USB 3.0、双频 Wi-Fi、Type-C 供电、蓝牙 5.4,采用模块化设计,组装就像拼乐高一样简单。通过配套的涂鸦赋能 App,用户可实现对 OriginBot 的灵活控制,玩法多样,功能更强大。 最关键的是,OriginBot 还是一个社区共建的开源项目,从结构到电气,从驱动到应用,OriginBot 小巧的身躯中,是一个庞大的开源世界。它预装 Ubuntu 和 ROS 2 机器人操作系统,开发者能直接将开源机器人的代码跑起来。依托于 TuyaOpen 开源框架,开发者还能低门槛实现软硬件功能的持续迭代。接下来,涂鸦保姆级教学,将帮助大家快速上手开发。
最关键的是,OriginBot 还是一个社区共建的开源项目,从结构到电气,从驱动到应用,OriginBot 小巧的身躯中,是一个庞大的开源世界。它预装 Ubuntu 和 ROS 2 机器人操作系统,开发者能直接将开源机器人的代码跑起来。依托于 TuyaOpen 开源框架,开发者还能低门槛实现软硬件功能的持续迭代。接下来,涂鸦保姆级教学,将帮助大家快速上手开发。

一、开发前的准备工作
1、找到本地代码位置
机器⼈本地代码位于 /root/ros_ws/ ⽂件夹下,⽂件夹内容如下:
TuyaOpencatkin_wsnew_tuya.zip #之前收到的Tuya压缩包,解压后包含上⽅两个⽂件夹,已进⾏修改从⽽实现demo中功能
<右滑查看完整指令>
2、找到云端代码位置
OriginBot 机器⼈的 Github 仓库https://github.com/WenqiWang1245/Tuya_GYH_OriginBot
如果需要在本地获取⼀份代码副本以方便后续操作,可以使⽤ Git 命令克隆此仓库:
git clone https://github.com/WenqiWang1245/Tuya_GYH_OriginBot.git
【注】这个步骤会同时将仓库的 main 分⽀内容也下载过来,后续大家可根据需要调整路径。
⼆、部署流程:从零到能跑的机器人
1、通过 MobaXterm 实现⽆线连接机器⼈
如果想要实现机器人的无线联网,我们可以通过 Linux 原生网络管理工具 nmcli 完成操作。这样开发者无需额外的网络配置库,开发门槛更低;而且整体代码运行依赖系统底层命令,稳定性更高。
1.1 硬件连接与网络配置
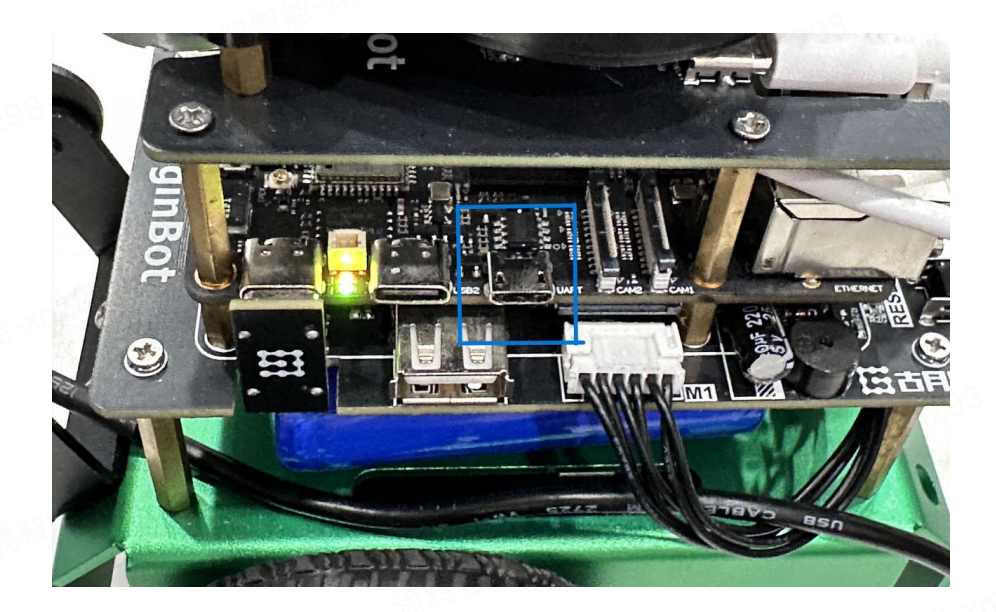
此处需要⼀根 micro-usb 线缆,将 micro-usb 端接⼊ RDK X5 开发板从左往右数第三个 microusb ⼝(即下图蓝⾊⽅框所示的接⼝),另外⼀端连接笔记本电脑。
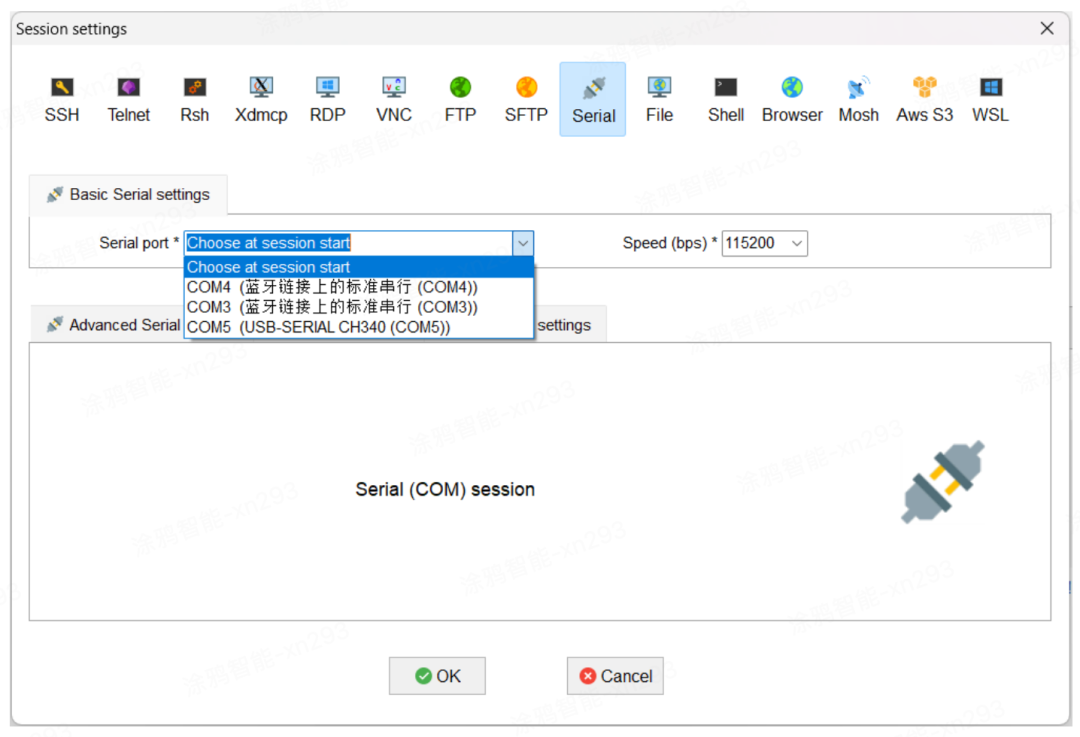
进⼊ MobaXterm,点击左上角 Session,上方菜单栏选择 Serial 连接,Serial port 选择下图中 USBSERIAL CH340 或其他类似选项,波特率选择 115200,点击 OK。
进⼊⻚⾯后,打开 OriginBot 开关,MobaXterm 会进⼊系统,显示 ubuntu login:登录⽤⼾名为 root,输⼊后点击键盘上 Enter 键,出现 Password:,登录密码也是 root(输⼊时不显⽰),点击 Enter 键,即可成功进⼊系统。
在系统终端逐⾏输⼊以下两⾏代码:
sudo nmcli device wifi rescan # 扫描wifi⽹络sudo nmcli device wifi list # 系统会列出找到的wifi⽹络
<右滑查看完整指令>
在列出的 Wi-Fi ⽹络中,找到想要连接的目标 Wi-Fi,然后依次按下 Ctrl+C 和 Esc 键,root@ubuntu: 命令⾏出现后,输⼊下方代码:
sudo wifi_connect "SSID" "PASSWD"
其中,SSID 填⼊ Wi-Fi 名称,PASSWD 填⼊ Wi-Fi 密码。按下 Enter 键,即可成功连接 Wi-Fi。然后在 MobaXterm 输出的消息 wlan0 部分,找到机器⼈ IP 地址,通过该地址,就能够实现用 SSH ⽆线连接机器⼈。
1.2 使⽤ SSH ⽆线连接机器⼈
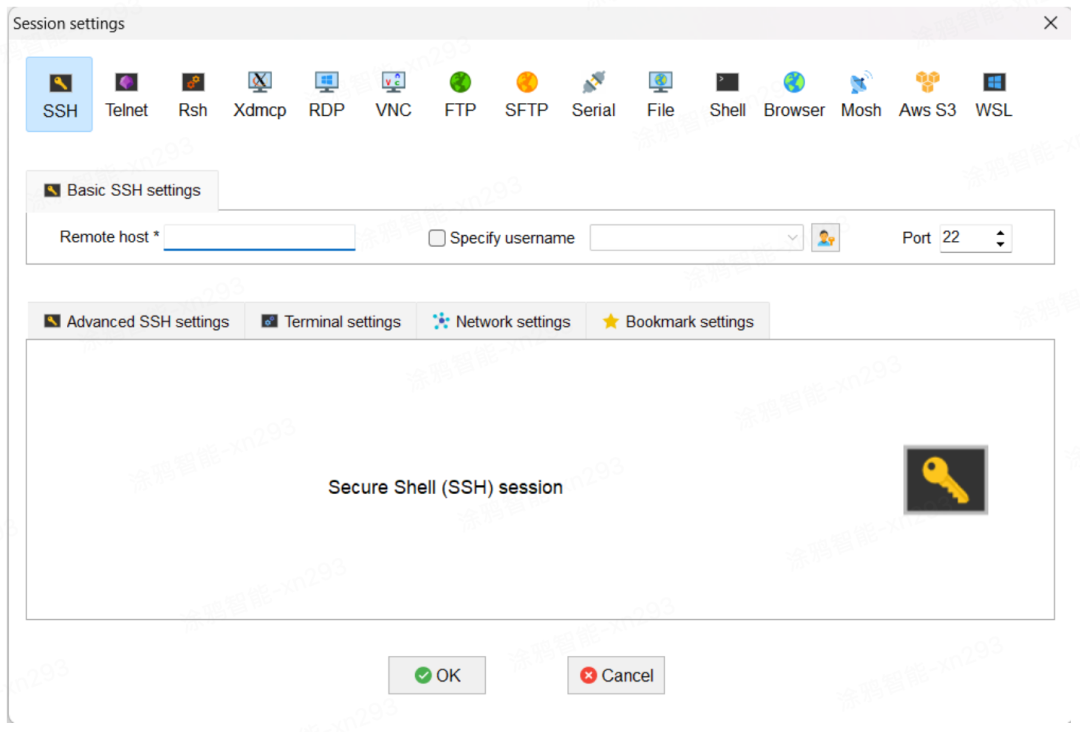
在 MobaXterm 中点击左上⻆ Session,在上⽅选择 SSH 连接,Remote host 处填上刚才显⽰的 IP 地址,其它地⽅保持不变,点击 OK。
此时命令⾏终端会出现 login as: ,输⼊ root 后点击 Enter,输⼊密码 root(此处输⼊不显⽰)即可通过 SSH 连接机器⼈。
2、设置运⾏节点
2.1 启动机器人底盘与雷达传感器控制
首先,请确认 OriginBot 顶部的激光雷达处于⼯作状态(即正在旋转);如果雷达没有⼯作,需要在顶层主板侧边,找到开关并拨到 ON 一侧。
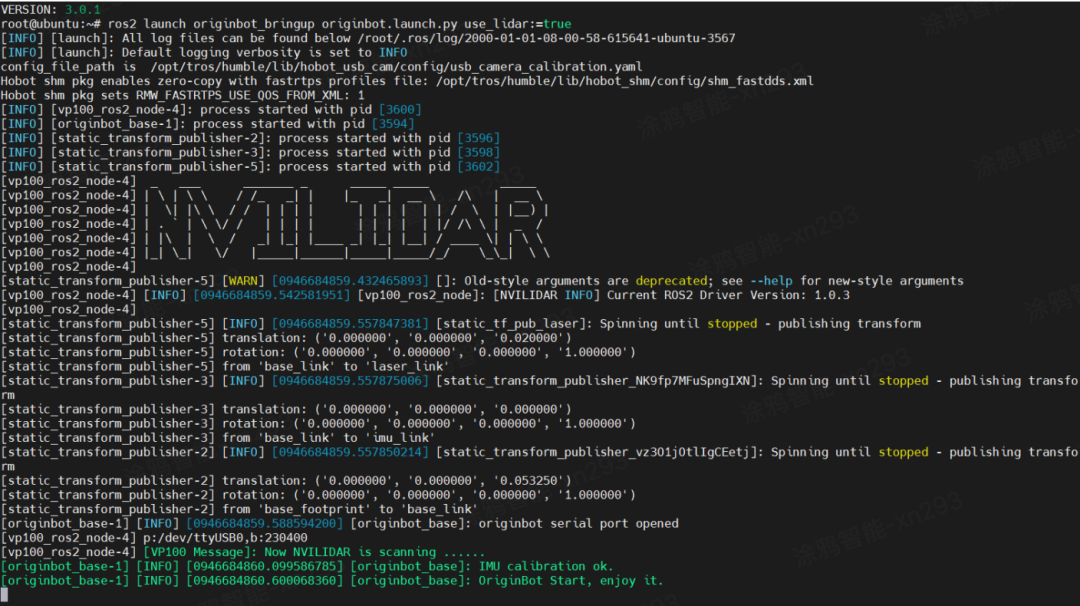
在命令⾏终端输⼊下方代码,启动 ROS 2 节点,同时控制机器⼈的底盘与激光雷达检测。通过 ROS 2 的 DDS 通信协议,可确保雷达数据与运动控制的低延迟同步:
ros2 launch originbot_bringup originbot.launch.py use_lidar:=true
<右滑查看完整指令>
输出内容如下图:
2.2 启动 cmd_pub 节点
打开⼀个新的终端,再次通过 SSH 连接机器⼈,连接完成后,逐⾏输⼊以下代码:
cd ros_ws/catkin_ws/ #输⼊后命令⾏提⽰更改为root@ubuntu:~/ros_ws/catkin_ws#source install/setup.bashros2 run cmd_pub cmd_pub
<右滑查看完整指令>
输⼊与输出内容完整如下:
root@ubuntu:~# cd ros_ws/catkin_ws/root@ubuntu:~/ros_ws/catkin_ws# source install/setup.bashroot@ubuntu:~/ros_ws/catkin_ws# ros2 run cmd_pub cmd_pub[INFO] [1747732698.896327220] [f_receiver_node]: FReceiverNode initialized.Subscribing to lidar data.
<右滑查看完整指令>
2.3 连接涂鸦 App
再次打开⼀个新的终端,通过 SSH 连接机器⼈,然后输⼊下方代码。这样可以快速调用 TuyaOpen SDK,并将机器人成功接入涂鸦 AI 云开发者平台:
cd ros_ws/TuyaOpen/apps/tuya_cloud/switch_demo/.build/bin/./switch_demo_1.0.0
代码运⾏后,会弹出⼆维码:

使⽤涂鸦 App 扫描二维码连接机器⼈,会出现机器⼈管理界⾯,接下来,就能直接控制机器人的前后左右移动:

3、App 控制效果演示
开发者无需额外编程就能调用预置的 AI 运动算法,而且可以通过多次点击组合的玩法,避免因为误触导致机器人的混乱与用户体验不佳。以下是供大家参考的基础控制效果:
3.1 连续点击三次“前进”键,OriginBot 就会开始走正⽅形路径。
3.2 打开“障碍检测”功能开关,⼩⻋会⾃动缓慢前⾏,遇到障碍物会⾃动重新寻路,避开前⽅障碍。
4、技术支持复制下方链接,可获取更多开发资料:
TuyaOpen 官网介绍--https://www.tuyaopen.ai/zh/
TuyaOpen 开源主仓库--https://github.com/tuya/TuyaOpen/
每一台 OriginBot 都是独一无二的,套件中包含唯一序号的车牌,从“0000”顺序开始编码,为你的爱车挂上专属车牌。OriginBot 还有更多无限可能性,等待大家一起来探索~

-
固态激光雷达参数以及避障视频2026-03-27 772
-
地瓜机器人RDK X5 规格书与地瓜机器人RDK X5原理图2025-04-21 4315
-
AGV小车使用避障雷达2024-05-20 1974
-
基于OpenHarmony系统和小凌派RK2206开发板的避障小车2022-04-21 7171
-
当“思岚”激光雷达邂逅盲人拐杖2021-11-12 4114
-
【北醒TFmini-S 测距/避障激光雷达传感器免费试用连载】基于北醒TFmini-S 测距/避障激光雷达传感器关键地区人员靠近防撞提醒装置2020-05-28 3092
-
AGV激光雷达SLAM定位导航技术2018-11-09 10092
-
固态设计激光雷达2018-01-25 8536
-
激光雷达2018-01-11 7244
-
固态激光雷达2018-01-04 5363
-
消费级激光雷达的起航2017-12-07 7509
-
【NanoPi NEO申请】基于NANOPI NEO开发板的智能小车2016-10-25 3186
-
关于基于低成本激光雷达避障智能小车的技术研究2016-10-11 8767
全部0条评论

快来发表一下你的评论吧 !
