

基于FPGA的AHT10温湿度传感器驱动设计
描述
概念
传感器输出经过标定的数字信号输出,通过标准的I2C接口传输数据;
相对湿度的分辨率在0.024%RH,工作范围为0~100%RH;
温度值的分辨率在0.01℃,工作范围为-40~85℃;
AHT10的供电范围为1.8~3.6V,推荐使用3.3V供电;
接口包含了完全静态逻辑,因而不存在最小串行时钟SCL频率;
IIC协议,同步半双工通信协议
起始位:主机在时钟高电平期间拉低总线;
数据位:主机在时钟低电平期间发送数据,主机在高电平期间保持不变;从机在时钟高电平期间采样数据;
应答为:主机收到数据后发送应答,从机才会发送下一字节数据;
停止位:主机在时钟高电平期间释放总线,主机在低电平期间保持不变;
可使用的I2C通信模式有经典型和高速模式,经典模式最小时钟周期是250us,高速模式最小时钟周期是100us;
AHT10配置与通信
I2C通信通过设备地址与从机进行通信,
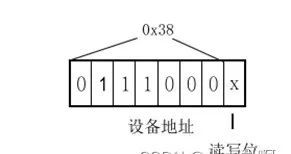
首先上电启动传感器,启动后需要先等待40ms(设备才开始正常工作),然后发送8‘h71 来获取状态字节,状态寄存器说明如下:
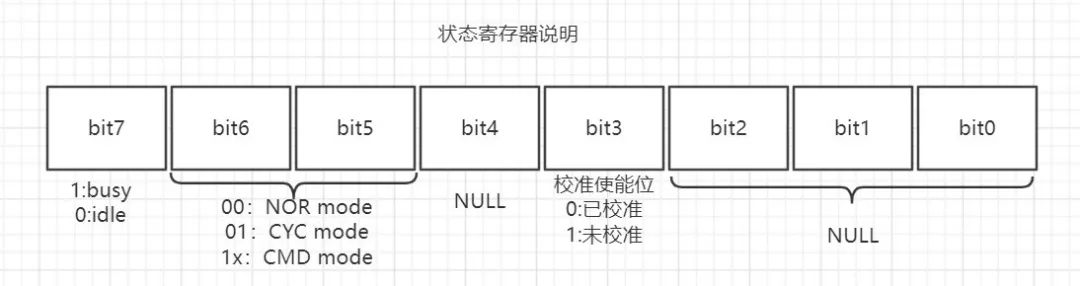
获取到校准使能位后,查看其是否已校准,若已校准则跳过当前步骤;若未校准则发送8‘hE1,进行初始化,然后发送8’h08,8‘h00;
接着开始触发测量,测量先发送8’hAC,然后发送8‘h33,8'h00;
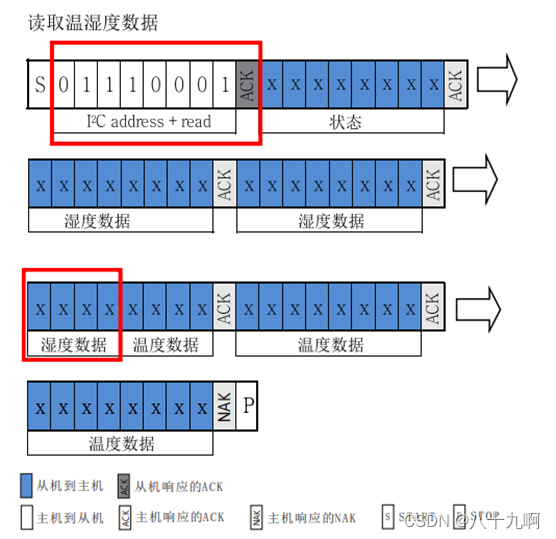
测量命令发送完成后,需要等待80ms,用于温湿度的测量;之后再发送命令8‘h71,以读取状态寄存器是否处于空闲状态(bit7 => idle);若是空闲状态,可以直接读取之后六个字节的温湿度数值;
读取温湿度数据构成
相对湿度和温度转换公式
将接收到的湿度值转换成%RH的格式:
R H [ % ] = ( S R H / 2 20 ) RH [\%] = (SRH/2^{20}) RH[%]=(SRH/220)
温度转换成℃表示:
T ( ℃ ) = ( S T / 2 20 ) . T(℃) = (ST/2^{20}). T(℃)=(ST/220).
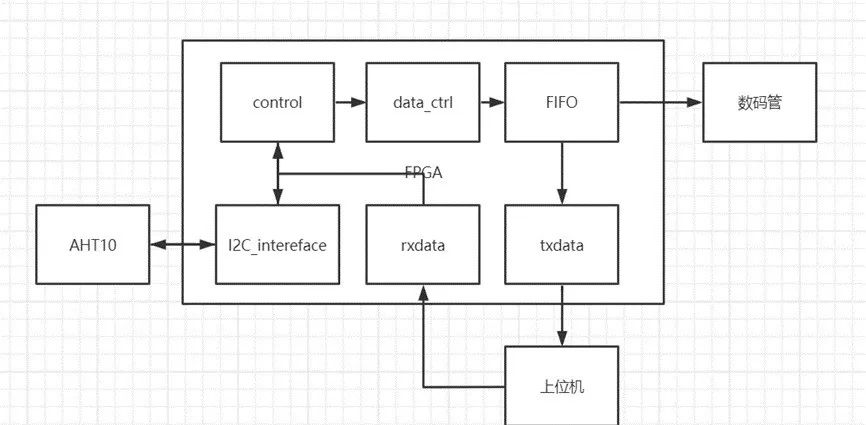
设计框架
整个模块的设计,首先是上位机通过UART,发送命令打开AHT10驱动控制模块、数码管显示模块以及串口模块;设备驱动用控制模块实现,通信接口使用I2C与AHT10进行通信,然后将读取的温湿度值先进行数值转换并取整,并转换成ASCII码方便查看温湿度值;然后将数据缓存到FIFO中,当缓存了一组完整的温度值数据后进行输出,发送给上位机,或是直接通过数码管显示;
I2C模块
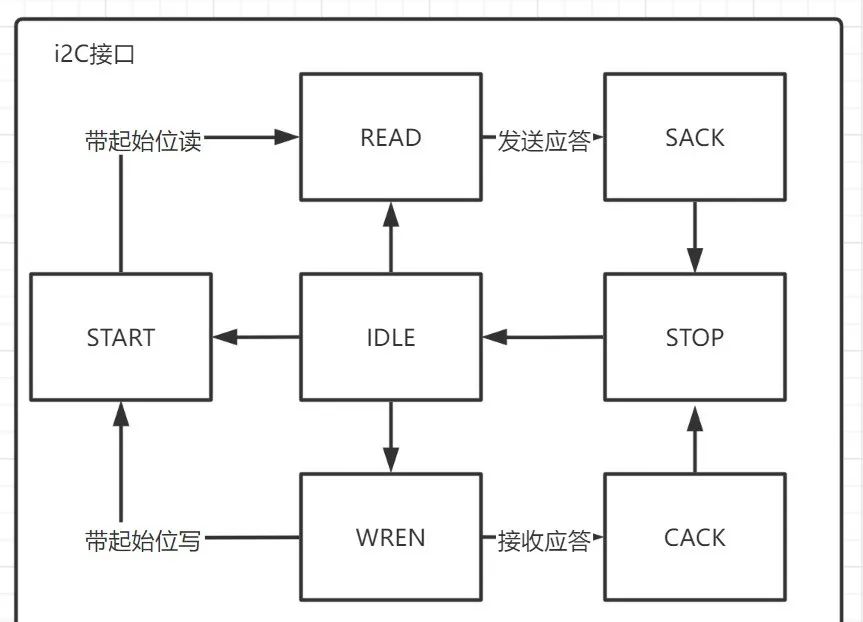
I2C接口模块状态机如上图所示,从空闲状态可以先发送起始位再读写一个字节数据,或直接读写一个字节数据,然后是收发应答位;最后发送停止位,就完成了一组数据的读写;
对于I2C通信,数据的传输速率选择的是50M/250 Bps;
include"param.v"module i2c_master( input clk , input rst_n , input req , input [3:0] cmd , input [7:0] din , output [7:0] dout , output done , output slave_ack , output i2c_scl , input i2c_sda_i , output i2c_sda_o , output i2c_sda_oe );//状态机参数定义localparam IDLE = 7'b000_0001, START = 7'b000_0010, WRITE = 7'b000_0100, RACK = 7'b000_1000, READ = 7'b001_0000, SACK = 7'b010_0000, STOP = 7'b100_0000;//reg [6:0] state_c ; reg [6:0] state_n ; reg [8:0] cnt_scl ;//产生i2c时钟wire add_cnt_scl ; wire end_cnt_scl ; reg [3:0] cnt_bit ;//传输数据 bit计数器wire add_cnt_bit ; wire end_cnt_bit ; reg [3:0] bit_num ; reg scl ;//输出寄存器reg sda_out ; reg sda_out_en ; reg [7:0] rx_data ; reg rx_ack ; reg [3:0] command ; reg [7:0] tx_data ;//发送数据wire idle2start ; wire idle2write ; wire idle2read ; wire start2write ; wire start2read ; wire write2rack ; wire read2sack ; wire rack2stop ; wire sack2stop ; wire rack2idle ; wire sack2idle ; wire stop2idle ; //状态机always @(posedge clk ornegedge rst_n) beginif (rst_n==0) begin state_c <= IDLE ; endelsebegin state_c <= state_n; endendalways @(*) begincase(state_c) IDLE :beginif(idle2start) state_n = START ; elseif(idle2write) state_n = WRITE ; elseif(idle2read) state_n = READ ; else state_n = state_c ; end START :beginif(start2write) state_n = WRITE ; elseif(start2read) state_n = READ ; else state_n = state_c ; end WRITE :beginif(write2rack) state_n = RACK ; else state_n = state_c ; end RACK :beginif(rack2stop) state_n = STOP ; elseif(rack2idle) state_n = IDLE ; else state_n = state_c ; end READ :beginif(read2sack) state_n = SACK ; else state_n = state_c ; end SACK :beginif(sack2stop) state_n = STOP ; elseif(sack2idle) state_n = IDLE ; else state_n = state_c ; end STOP :beginif(stop2idle) state_n = IDLE ; else state_n = state_c ; enddefault : state_n = IDLE ; endcaseendassign idle2start = state_c==IDLE && (req && (cmd&`CMD_START)); assign idle2write = state_c==IDLE && (req && (cmd&`CMD_WRITE)); assign idle2read = state_c==IDLE && (req && (cmd&`CMD_READ )); assign start2write = state_c==START && (end_cnt_bit && (command&`CMD_WRITE)); assign start2read = state_c==START && (end_cnt_bit && (command&`CMD_READ )); assign write2rack = state_c==WRITE && (end_cnt_bit); assign read2sack = state_c==READ && (end_cnt_bit); assign rack2stop = state_c==RACK && (end_cnt_bit && (command&`CMD_STOP )); assign sack2stop = state_c==SACK && (end_cnt_bit && (command&`CMD_STOP )); assign rack2idle = state_c==RACK && (end_cnt_bit && (command&`CMD_STOP ) == 0); assign sack2idle = state_c==SACK && (end_cnt_bit && (command&`CMD_STOP ) == 0); assign stop2idle = state_c==STOP && (end_cnt_bit); //计数器always @(posedge clk ornegedge rst_n) beginif (rst_n==0) begin cnt_scl <= 0; endelseif(add_cnt_scl) beginif(end_cnt_scl) cnt_scl <= 0; else cnt_scl <= cnt_scl+1 ; endendassign add_cnt_scl = (state_c != IDLE); assign end_cnt_scl = add_cnt_scl && cnt_scl == (`SCL_PERIOD)-1 ; always @(posedge clk ornegedge rst_n) beginif (rst_n==0) begin cnt_bit <= 0; endelseif(add_cnt_bit) beginif(end_cnt_bit) cnt_bit <= 0; else cnt_bit <= cnt_bit+1 ; endendassign add_cnt_bit = (end_cnt_scl); assign end_cnt_bit = add_cnt_bit && cnt_bit == (bit_num)-1 ; always @(*)beginif(state_c == WRITE | state_c == READ) begin bit_num = 8; endelsebegin bit_num = 1; endend//commandalways @(posedge clk ornegedge rst_n)beginif(~rst_n)begin command <= 0; endelseif(req)begin command <= cmd; endend//tx_dataalways @(posedge clk ornegedge rst_n)beginif(~rst_n)begin tx_data <= 0; endelseif(req)begin tx_data <= din; endend//sclalways @(posedge clk ornegedge rst_n)beginif(~rst_n)begin scl <= 1'b1; endelseif(idle2start | idle2write | idle2read)begin//开始发送时,拉低 scl <= 1'b0; endelseif(add_cnt_scl && cnt_scl == `SCL_HALF-1)begin scl <= 1'b1; endelseif(end_cnt_scl && ~stop2idle)begin scl <= 1'b0; endend//sda_outalways @(posedge clk ornegedge rst_n)beginif(~rst_n)begin sda_out <= 1'b1; endelseif(state_c == START)begin//发起始位if(cnt_scl == `LOW_HLAF)begin//时钟低电平时拉高sda总线 sda_out <= 1'b1; endelseif(cnt_scl == `HIGH_HALF)begin//时钟高电平时拉低sda总线 sda_out <= 1'b0; //保证从机能检测到起始位endendelseif(state_c == WRITE && cnt_scl == `LOW_HLAF)begin//scl低电平时发送数据 并串转换 sda_out <= tx_data[7-cnt_bit]; endelseif(state_c == SACK && cnt_scl == `LOW_HLAF)begin//发应答位 sda_out <= (command&`CMD_STOP)?1'b1:1'b0; endelseif(state_c == STOP)begin//发停止位if(cnt_scl == `LOW_HLAF)begin//时钟低电平时拉低sda总线 sda_out <= 1'b0; endelseif(cnt_scl == `HIGH_HALF)begin//时钟高电平时拉高sda总线 sda_out <= 1'b1; //保证从机能检测到停止位endendend//sda_out_en 总线输出数据使能always @(posedge clk ornegedge rst_n)beginif(~rst_n)begin sda_out_en <= 1'b0; endelseif(idle2start | idle2write | read2sack | rack2stop)begin sda_out_en <= 1'b1; endelseif(idle2read | start2read | write2rack | stop2idle)begin sda_out_en <= 1'b0; endend//rx_data 接收读入的数据always @(posedge clk ornegedge rst_n)beginif(~rst_n)begin rx_data <= 0; endelseif(state_c == READ && cnt_scl == `HIGH_HALF)begin rx_data[7-cnt_bit] <= i2c_sda_i; //串并转换endend//rx_ackalways @(posedge clk ornegedge rst_n)beginif(~rst_n)begin rx_ack <= 1'b1; endelseif(state_c == RACK && cnt_scl == `HIGH_HALF)begin rx_ack <= i2c_sda_i; endend//输出信号assign i2c_scl = scl ; assign i2c_sda_o = sda_out ; assign i2c_sda_oe = sda_out_en ; assign dout = rx_data; assign done = rack2idle | sack2idle | stop2idle; assign slave_ack = rx_ack;endmodule
`include "param.v"module aht_ctrl ( input sys_clk , input rst_n ,inputdriver_en, output req , output [3:0] cmd , output [7:0] data , input done , input [7:0] rd_data , output[19:0]hum_data, output [19:0]temp_data, output dout_vld );//localparam START = 7'b000_0001, INIT = 7'b000_0010, CHECK_INIT = 7'b000_0100, IDLE = 7'b000_1000, TRIGGER = 7'b001_0000, WAIT = 7'b010_0000, READ = 7'b100_0000; parameterDELAY_40MS = 200_0000 , DELAY_80MS = 400_0000 , DELAY_500MS = 2500_0000; reg [7:0] state_c ; reg [7:0] state_n ; reg [2:0] cnt_byte ; wire add_cnt_byte ; wire end_cnt_byte ; reg tx_req ; reg [3:0] tx_cmd ; reg [7:0] tx_data ; reg[47:0]read_data; reg[27:0]cnt; wireadd_cnt; wireend_cnt; reg[24:0]delay; regfinish_init; wirestart2init; wireinit2check; wirecheck2idle; wirecheck2init; wireidle2trigger; wiretrigger2wait; wirewait2read; wireread2idle;regdriver_en_r1;regdriver_en_r2;wirene_driver;// ne_driveralways@(posedge sys_clk ornegedge rst_n)beginif(!rst_n) begin driver_en_r1 <= 0 ; driver_en_r2 <= 0 ; endelsebegin driver_en_r1 <= driver_en ; driver_en_r2 <= driver_en_r1 ;endendassign ne_driver = (~driver_en_r1 && driver_en_r2) ;//statealways @(posedge sys_clk ornegedge rst_n) beginif (rst_n==0) begin state_c <= START ; endelsebegin state_c <= state_n; endend//状态转移always @(*) begincase(state_c) START :beginif(ne_driver) begin state_n = state_c ; endelseif(start2init) begin state_n = INIT ;endelsebegin state_n = state_c ;endend INIT :beginif(ne_driver) begin state_n = START ;endelseif(init2check)begin state_n = IDLE ;endelse state_n = state_c ; end CHECK_INIT :beginif(ne_driver) begin state_n = START ;endelseif(check2idle)begin state_n = IDLE ;endelseif(check2init) begin state_n = INIT; endelse state_n = state_c ; end IDLE :beginif(ne_driver)begin state_n = START ;endelseif(idle2trigger)begin state_n = TRIGGER ;endelse state_n = state_c ; end TRIGGER :beginif(ne_driver)begin state_n = START ;endelseif(trigger2wait)begin state_n = WAIT ;endelse state_n = state_c ; end WAIT :beginif(ne_driver)begin state_n = START ;endelseif(wait2read) state_n = READ ; else state_n = state_c ; end READ :beginif(ne_driver)begin state_n = START ;endelseif(read2idle) state_n = IDLE ; else state_n = state_c ; enddefault : state_n = START ; endcaseendassign start2init = state_c == START && (end_cnt); assign init2check = state_c == INIT && (end_cnt_byte); assign check2idle = state_c == CHECK_INIT && (finish_init) && end_cnt_byte; assign check2init = state_c == CHECK_INIT && (~finish_init)&& end_cnt_byte; assign idle2trigger = state_c == IDLE && (end_cnt); assign trigger2wait = state_c == TRIGGER && (end_cnt_byte); assign wait2read = state_c == WAIT && (end_cnt); assign read2idle = state_c == READ && (end_cnt_byte); // delayalways @(posedge sys_clk ornegedge rst_n) beginif(!rst_n) begin delay <= DELAY_40MS; endelseif(state_c == START) begin delay <= DELAY_40MS; endelseif(state_c == WAIT) begin delay <= DELAY_80MS; endelseif(state_c == IDLE) begin delay <= DELAY_500MS; endend// cntalways @( posedge sys_clk ornegedge rst_n ) beginif ( !rst_n ) begin cnt <= 0; endelseif ( add_cnt ) beginif ( end_cnt ) begin cnt <= 0; endelsebegin cnt <= cnt + 1; endendelsebegin cnt <= 0; endendassign add_cnt = (state_c == START || state_c == WAIT || state_c == IDLE) && driver_en_r2; assign end_cnt = cnt == delay - 1 && add_cnt || ne_driver ;// cnt_bytealways @(posedge sys_clk ornegedge rst_n) beginif(!rst_n)begin cnt_byte <= 0; endelseif(add_cnt_byte) beginif(end_cnt_byte) begin cnt_byte <= 0; endelse cnt_byte <= cnt_byte + 1; endendassign add_cnt_byte = (state_c == INIT || state_c == CHECK_INIT ||state_c == TRIGGER || state_c == READ) && done; assign end_cnt_byte = (cnt_byte == (state_c == READ?6:3) && add_cnt_byte) || ne_driver ;//always @(*)begincase (state_c) INIT : case(cnt_byte) 0 :TX(1'b1,{`CMD_START | `CMD_WRITE},{`I2C_ADR,1'b0}); 1 :TX(1'b1, `CMD_WRITE ,`CMD_INIT); 2 :TX(1'b1,`CMD_WRITE ,8'b000_1000); 3 :TX(1'b1,{`CMD_WRITE | `CMD_STOP} ,8'b0000_0000); default :TX(1'b0,tx_cmd,tx_data); endcase CHECK_INIT: case(cnt_byte) 0 :TX(1'b1,{`CMD_START | `CMD_WRITE},{`I2C_ADR,1'b0}); 1 :TX(1'b1,`CMD_WRITE ,`CMD_CHECK); 2 :TX(1'b1,{`CMD_START | `CMD_WRITE},{`I2C_ADR,1'b1}); 3 :TX(1'b1,{`CMD_READ | `CMD_STOP},0); default :TX(1'b0,tx_cmd,tx_data); endcase TRIGGER: case(cnt_byte) 0 :TX(1'b1,{`CMD_START | `CMD_WRITE},{`I2C_ADR,1'b0});//1 :TX(1'b1,`CMD_WRITE ,`CMD_TRIGGER); 2 :TX(1'b1,`CMD_WRITE ,`DATA_0); 3 :TX(1'b1,{`CMD_WRITE | `CMD_STOP},`DATA_1); default :TX(1'b0,tx_cmd,tx_data); endcase READ : case(cnt_byte) 0 :TX(1'b1,{`CMD_START | `CMD_WRITE},{`I2C_ADR,1'b1}); 1 :TX(1'b1,`CMD_READ ,0); 2 :TX(1'b1,`CMD_READ ,0); 3 :TX(1'b1,`CMD_READ ,0); 4 :TX(1'b1,`CMD_READ ,0); 5 :TX(1'b1,`CMD_READ ,0); 6 :TX(1'b1,{`CMD_READ | `CMD_STOP},0); default :TX(1'b0,tx_cmd,tx_data); endcasedefault: TX(1'b0,0,0); endcaseend// finish_initalways @(posedge sys_clk ornegedge rst_n) beginif(!rst_n) begin finish_init <= 0; endelseif(state_c == CHECK_INIT && done && rd_data[3]) begin finish_init <= 1; endend// read_dataalways @(posedge sys_clk ornegedge rst_n) beginif(!rst_n) begin read_data <= 0; endelseif(state_c == READ && cnt_byte >0 && done) begin read_data <= {read_data[39:0],rd_data}; endend//task TX; input req ; input [3:0] command ; input [7:0] data ; begin tx_req = req; tx_cmd = command; tx_data = data; endendtask//outassign req = tx_req ; assign cmd = tx_cmd ; assign data = tx_data; assign hum_data = read_data[39:20]; assign temp_data = read_data[19:0]; assign dout_vld = read2idle;endmodule
其它模块
然后将温湿度数值按照上述格式转换:
temp_data_r <= (((temp_data*2000)>>12) - (500)); hum_data_r <= ((hum_data *1000) >> 12);
再将数据转换成ASCII码:
always@(posedge sys_clk or negedge rst_n)begin case (cnt) 1 : dout_r <= 8'hce; 2 : dout_r <= 8'hc2; 3 : dout_r <= 8'hb6; 4 : dout_r <= 8'hc8; 5 : dout_r <= 8'h3a; 6 : dout_r <= (temp_data_r / 100 % 10 )+48; 7 : dout_r <= (temp_data_r / 10 % 10 )+48; 8 : dout_r <= 8'h2e; 9 : dout_r <= (temp_data_r % 10 )+48; 10 : dout_r <= 8'ha1; 11 : dout_r <= 8'he6; 12: dout_r <= 9; 13: dout_r <= 8'hca; 14: dout_r <= 8'haa; 15: dout_r <= 8'hb6; 16: dout_r <= 8'hc8; 17: dout_r <= 8'h3a; 18: dout_r <= (hum_data_r / 100 % 10 )+48; 19: dout_r <= (hum_data_r / 10 % 10 )+48; 20: dout_r <= 8'h2e; 21: dout_r <= (hum_data_r % 10 )+48; 22: dout_r <= 8'h25; default: dout_r <= 0; endcaseend
最后将数值通过FIFO缓存完整的22字节数据后输出即可;
同时还可以将数据转换成bcd码显示到数码管上;
-
AHT20温湿度传感器的数据采集2021-08-23 1148
-
aht10温湿度传感器的特点有哪些呢2022-01-25 1151
-
W601之AHT10温湿度传感器简介2022-02-11 1976
-
AHT20温湿度传感器简介2022-02-14 2011
-
怎样去读取温湿度传感器(AHT10)及无线发送数据呢2022-02-21 1041
-
【沁恒微CH32V307评估板试用体验】使用AHT10获取温湿度2022-05-31 15466
-
在Art-Pi开发板上使用AHT10温湿度模块2022-08-17 1519
-
基于51单片机和AHT10温湿度传感器的温湿度计源码2023-10-09 1297
-
MSP430 F149 单片机 AHT10 温湿度 LCD1602 显示2021-11-19 1128
-
aht10温湿度传感器特点及使用介绍2021-12-01 2926
-
14、W601之AHT10温湿度传感器2021-12-08 1493
-
AHT10温湿度传感器的使用2022-07-20 4929
-
用国产高精度温湿度传感器AHT10,接入机智云实现数据传输2022-07-21 3717
-
基于RVB2601开发板的AHT10温湿度传感器2023-10-07 2376
-
CW32模块使用案例 AHT10温湿度传感器2024-11-28 1994
全部0条评论

快来发表一下你的评论吧 !
