

固态LiDAR发展前景浅析
汽车电子
描述
目前,直接切入全固态LiDAR或者正朝着全固态LiDAR转型的国内外企业数量已逐步超越机械式LiDAR和混合固态LiDAR领域。
1. Quanergy(美国)
在全固态LiDAR领域最吸睛的公司则是Quanergy。Quanergy成立于2012年,总部位于硅谷中心的加州桑尼维尔,其领先的固态LiDAR传感器和软件可实时捕获和处理高清3D地图数据和进行对象侦测、跟踪和分类,应用领域包括运输、安防、地图和工业自动化等。Quanergy的LiDAR传感器在六大关键商业化指标(成本、性能、可靠性、尺寸、重量和功率效率)上均处于领先地位,同时满足利用固态技术进行大规模部署所要求的耐久性和可靠性。
Quanergy采用光学相控阵技术,于2017年推出的S3是全球首款、也是唯一一款汽车级固态LiDAR系统,在成本、性能和可靠性方面均处于行业领先地位。
2. LeddarTech(加拿大)
LeddarTech成立于2007年,总部位于加拿大,专注于为自动驾驶汽车和驾驶辅助系统开发自己的LiDAR技术。其将在CES 2018(2018年1月9~12日在美国拉斯维加斯举办的国际消费电子展)重磅展出LeddarCore LCA2芯片——业界首款能够实现车用LiDAR大规模量产的3D固态LiDAR芯片,包括LCA2 芯片工程样品,以及基于LCA2的3D泛光(Flash)LiDAR模组。同时展出的还包括目前仍处于开发阶段的LiDAR系统分立方案LeddarCore LCA3,首款样品计划将于2018年推出。
3. Oryx Vision(以色列)
以色列初创公司Oryx Vision创立于2009年,目前,已经通过一轮融资募集了1700万美元,以为自动驾驶汽车开发固态深度视觉解决方案。该公司近期发布了一款新型LiDAR传感器,利用了长波红外激光器来追踪路面上的物体。Oryx的相干光LiDAR系统使用一种被称为“纳米天线”的技术,不像激光雷达那样通过光电传感器来侦测光线粒子,而是根据光的“波粒二象性”以波的形式使用纳米天线来感知反射回来的信号(光)。这款新型LiDAR传感器纳米天线可以接收波长为10微米的电磁波,这种波长能有效穿透烟雾,而且不会像激光雷达那样受强光影响。
4. XenomatiX(比利时)
XenomatiX成立于2013年,总部位于比利时鲁汶。其LiDAR没有任何运动部件,尺寸小、功耗低,基于成熟的半导体元器件,创新的投影模式保证了出色的耐久性。通过数千束激光的同时照明,分辨率达到每秒百万次的测量,从而能识别汽车周围的任一细节事物。使用平行的低功率激光束,利用电荷积分飞行时间(ToF)法来测量距离,工作范围达200米。
5. Continental(德国)
德国大陆集团(Continental)创始于1871年,是具有百年历史的跨国性企业集团,世界领先的汽车配套产品供应商之一。大陆集团依靠强大的研发团队,设计生产的短距激光雷达SRL1成为一款可靠且高效的固态LiDAR,无需任何机械运动部件即可实现正面碰撞检测等应用。SRL1提供基于红外激光技术的紧急制动辅助功能,且已经在微型车上使用。Continental于去年买下美国的3D泛光(Flash)激光雷达公司Advanced Scientific Concepts,在今年的法兰克福车展上,大陆这一采用Flash技术方案的固态激光雷达也出现在展示区,设计探测距离达到200米。
6. TetraVue(美国)
TetraVue成立于2008年,总部位于美国加州。其独创的“光切片(Light Slicer)”专利技术,集成了固态激光雷达发射单元,深度感知摄像头,以及标准的CMOS和CCD像素技术等一系列传感器和算法,能够通过时间维度和距离维度的量测,利用标准的CMOS传感器测算光学强度信息。

7. Blackmore(美国)
Blackmore总部位于美国蒙大拿洲博兹曼,是研发紧凑型调频连续波(FMCW)LiDAR的领导者,并提供配套的分析工具软件。产品可应用在关键任务、汽车、军事和工业环境,这些应用场景中,传统的光电/红外传感器和直接探测3D成像则受到成本和性能规格限制。

8. Strobe / GE(美国)
Strobe是从OEwaves独立出来的一家专注于自动驾驶汽车LiDAR开发的创业公司。OEwaves由Strobe公司主要创始人之一创办于2000年8月,核心技术包括光电振荡器(OEO)和“回音壁模式(whispering gallery mode)”光学谐振腔。Strobe于2017年10月被通用(GE)收购。收购时Strobe仅有12名员工,该公司专注于为自动驾驶汽车开发100美元以下的全固态LiDAR。Strobe模仿线性调频雷达开发了一种线性频率调制(FM)激光,其线性脉冲的频率能够线性变化。探测器通过测量反射的线性调频脉冲激光的相位和频率,不仅能够获得物体的距离信息,还能测量其相对运动速度。

9. 光珀智能(中国)
光珀智能(Genius Pros)位于中国杭州,该公司推出了“光珀第一代ToF传感器芯片”,基于这样的芯片,构建了三个固态面阵式激光雷达技术平台,分别满足不同距离下(近、中、远),强阳光下(100Klux),大场景(70⁰),高精度(《1%),高空间分辨率(0.06⁰V)等三维感知需求。这三个技术平台可以服务于智能安防、机器人的导航与避障、无人驾驶的环境感知。特别是在无人驾驶领域,光珀的传感器满足了量产无人车对激光雷达低成本、高空间分辨率的两大需要。

10. 北醒光子(中国)
北醒光子(Benewake)于2015年成立于北京,专注于固态激光雷达的研发和制造。北醒研发的CE30,是一款具有大视场角的全固态激光雷达。它可同时输出132°水平视场、9°垂直视场范围内的灰度与深度信息,且内部无任何机械旋转部件,以保证更高的可靠性与稳定性。
此外,德国激光雷达供应商Ibeo,国内镭神智能、速腾聚创等企业均已在全固态LiDAR领域布局。显然,抢占全固态LiDAR的先机,就抢食到未来自动驾驶的“香饽饽”,全固态LiDAR已成为兵家必争之地。
全固态LiDAR的派别之争
激光雷达测距方法分为飞行时间法和三角法两大类。目前,汽车全固态激光雷达大多采用飞行时间法。
激光雷达测距方法
按照全固态LiDAR发射端照明方式可以分为激光多束发射、可操纵或相控阵列、泛光面阵发射三种模式。
按照全固态LiDAR探测端的接收技术,可以分为相干接收技术和直接接收技术。直接接收技术是接收光子能量的直接形式,优点是技术简单和成熟。相干接收技术的接收灵敏度,速度分辨率高,但需要接收机的频带特别宽,对激光发射的频率稳定度的要求也高,对光学天线系统和机内光路的校准的要求更严格,信息处理单元更复杂。
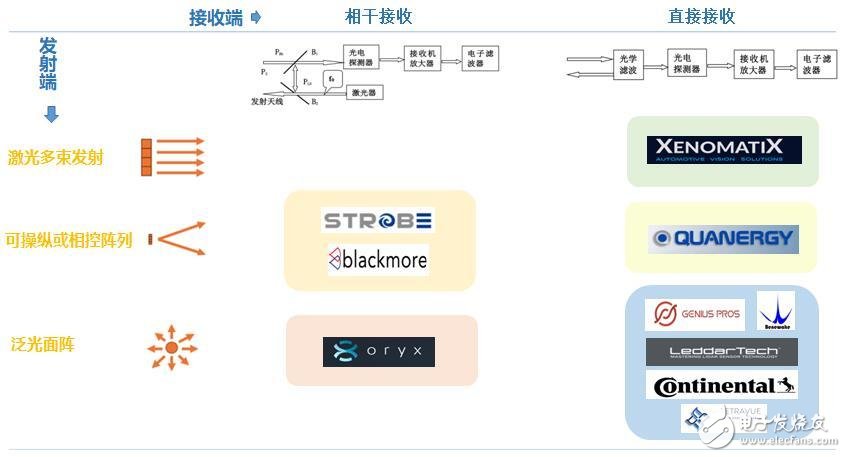
全固态LiDAR按照发射端的光波特性和接收端的探测技术进行分类及代表企业
光学相控阵LiDAR
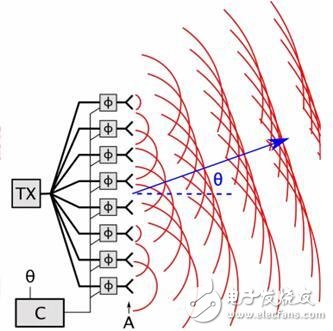
在光学相控阵(OPA,Optical Phased Array)LiDAR中,相控阵发射器由若干发射接收单元组成阵列,通过改变加载在不同单元的电压,进而改变不同单元发射光波特性(如光强、相位),实现对每个单元光波的独立控制,通过调节从每个相控单元辐射出的光波之间的相位关系,在设定方向上产生互相加强的干涉从而实现高强度光束,而其它方向上从各个单元射出的光波彼此相消,因此,辐射强度接近于零。组成相控阵的各相控单元在程序的控制下,可使一束或多束高强度光束的指向按设计的程序实现随机空域扫描(对此原理不理解的“筒子”,可以复习下光栅衍射的物理现象)。
Quanergy光学相控阵LiDAR S3工作原理示意图
光学相控阵LiDAR具有扫描速度快(一般都可以达到MHz量级以上)、扫描精度或指向精度高(千分之一度量级以上)、可控性好(除对目标区域进行高密度的扫描外,在其它区域也能进行稀疏扫描)等优点。
但光学相控阵的制造工艺难度较大,这是因为要求阵列单元尺寸必须不大于半个波长,一般目前激光雷达的工作波长均在1微米左右,这就意味着阵列单元的尺寸必须不大于500纳米。而且阵列数越多,阵列单元的尺寸越小,能量越往主瓣集中,这就对加工精度要求更高。此外,材料的研究和选择也是非常关键的因素,到目前为止,铌酸锂晶体、PLZT压电陶瓷、液晶和AlGaAs基波导光学相控已得到开发。未来,器件方面,进一步减小相控阵单元尺寸,提高衍射效率,减小器件尺寸;更为根本的材料研究方面,开发工作在中波红外、长波红外、紫外波段的液晶材料,以及继续寻求具有大双折射、响应速度快、热稳定性高、耐强激光的高性能电光材料,同时发展对中长波和紫外波段具有较好透过率的电光材料,以扩展光学相控阵器件的应用领域。
调频连续波LiDAR
调频连续波(FMCW)LiDAR采用线性调频信号,信号发生器产生线性调频锯齿脉冲射频信号对连续波半导体激光器输出的激光进行线性调频强度调制。调制后激光经过准直和扩束后发射出去。激光探测到目标后,一部分激光反射到光电探测器上,转化为电信号,从而提取中频信号获得目标的距离信息。
调频连续波LiDAR测距原理
调频连续波LiDAR概念并不新颖,但是面对的技术挑战不少,例如发射激光的线宽限制、线性调频脉冲的频率范围、线性脉冲频率变化的线性度,以及单个线性调频脉冲的可复制性等。Strobe采用光电振荡器(OEO)和“回音壁模式(Whispering Gallery Mode)”光学谐振腔来解决以上问题,其激光光源可以提供具有15 GHz或以上带宽的线性调频脉冲激光,使LiDAR系统的距离分辨能力可以下探至厘米级以下。
Strobe董事会成员Brower曾在2015年发布的论文谈到他的LiDAR发射端设计与OPA类似,或用于Strobe的调频连续波LiDAR
纳米天线阵列LiDAR
Oryx Vision凭借纳米天线阵列LiDAR,找到了困扰自动驾驶汽车商业化的主要问题:如何平衡探测距离、精度和成本三者的关系。Oryx Vision深度传感器可以检测到150米远的微小物体,它既可以在暗夜里工作,也不会受直射的阳光影响,而即使在雨雾等极端天气条件下也可以稳定工作。Oryx Vision传感器可以无缝集成到车辆的四周,一组这样的传感器不但可以提供360°范围的高性能的景深探测覆盖,而且价格低廉。
Oryx Vision使用的是长波太赫兹红外激光的激光器,因为这种红外光人眼不可见,功率更高。而这种红外光还很难被水吸收,不会被云雾、强烈的阳光直射所干扰。当发射出的激光反射回传感器时,光学器件将反射回的入射光引导到大量极小的整流纳米天线上。入射光在被整流的天线中产生AC响应,换句话说,被转换成DC信号。该系统的灵敏度是传统LiDAR的上百倍。因为天线将入射光处理为波,所以它们还可以检测到多普勒效应(由于其反弹的相对运动而引起的频率变化),并且由此还可以确定在道路中或附近的其它物体的速度。
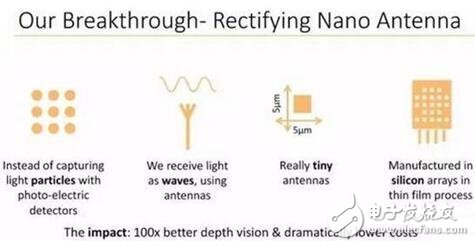
Oryx Vision采用的纳米天线只有25平方微米,使用薄膜芯片制造工艺直接在集成电路上制造
每个纳米天线只有5 x 5平方微米,使用薄膜芯片制造工艺在硅晶圆上形成阵列,成本相当低廉。而且这将使得信号被馈送到机器学习系统相当简单,而这个机器学习系统可以对场景中的对象进行分类,从而使得对场景的感知更加智能化。
泛光(Flash)面阵式LiDAR
泛光面阵式是全固态LiDAR中最主流的技术之一。
泛光面阵式LiDAR的激光光源主要有两种方式:脉冲和连续波,分别对应脉冲飞行时间(pToF,PluseToF)LiDAR和连续波飞行时间(cwToF,Continuous Wave ToF)LiDAR。pToF LiDAR采用脉冲,可以实现远距离探测(如100米以上);而cwToF LiDAR采用连续波,主要进行近距离探测(如数十米)。泛光面阵式LiDAR属于非扫描式LiDAR,通过脉冲或连续波捕获整个场景,而非用激光束逐点扫描。由于探测电子返回脉冲和带宽较宽的弱点,泛光面阵式LiDAR易受噪声影响,而阈值触发可引起测量误差Δt。
cwToF LiDAR、pToF LiDAR、雷达和超声波传感器的参数对比
由激光雷达的理论可知,在功率受限的情况下,要实现远的探测距离,则要求大的脉冲时宽,而要实现高的探测精度,则需要大的带宽,简单脉冲时宽带宽乘积接近于1,时宽与带宽相互关联,不能同时增大时宽与带宽。pToF LiDAR则通过增益调制式脉冲激光源,可以解决采用连续波激光器发射正弦波在对目标成距离像时限制了激光器的瞬时功率从而严重影响成像质量和测量范围的问题。
-
国产FPGA的发展前景是什么?2024-07-29 8107
-
嵌入式系统发展前景?2024-02-22 11206
-
车载设备GPS的发展前景如何?2021-05-13 1754
-
嵌入式的发展前景2021-01-13 3390
-
固态电池发展现状_固态电池发展前景2019-07-24 10645
-
无线电发展前景怎样2014-09-13 3771
-
请问各位大神,labview的发展前景怎样?2014-04-03 6124
-
ARM的发展前景怎么样2013-11-20 3694
-
STATCOM发展前景怎么样啊?2013-05-12 12737
-
labview的发展前景2012-11-18 11269
-
嵌入式发展前景2012-08-20 13479
-
网络电话的发展前景?2012-07-05 2912
-
浅析锂电池产业的发展前景2010-05-28 926
-
浅析数据通信的发展前景2010-01-16 2578
全部0条评论

快来发表一下你的评论吧 !
