

不得不说的汽车防撞系统,毫米波雷达技术及应用大解析
今日头条
描述
车载毫米波雷达技术原理
车载毫米波雷达利用天线发射电磁波后,对前方或后方障碍物反射的回波进行不断检测,并通过雷达信号处理器进行综合分析,计算出与前方或后方障碍物的相对速度和距离,并生成警告信息传递给汽车控制电路,由汽车控制电路控制汽车变速器和制动器作出应对动作,从而避免发生碰撞。
毫米波雷达具有探测性能稳定、作用距离较长、环境适用性好等特点。与超声波雷达相比,毫米波雷达具有体积小、质量轻和空间分辨率高的特点。与红外、激光、摄像头等光学传感器相比,毫米波雷达穿透雾、烟、灰尘的能力强,具有全天候全天时的特点。各类车载传感器的优缺点如表1所示。
各类车载传感器优缺点对比

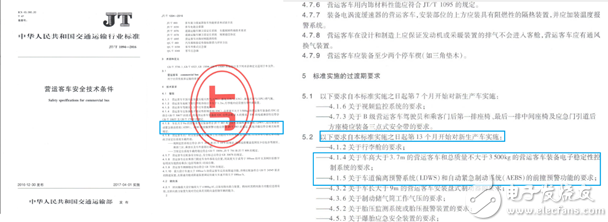
交通运输部发出关于贯彻落实交通运输行业标准《营运客车安全技术条件》(JT/T 1094-2016)的通知,对于这个通知,很多整车企业和集成商都以观望的态度来应对,然而《营运客车安全技术条件》下的技术要求第4.1.5条明确规定:9M以上的营运客车要求加装车道偏离预警系统(LDWS)以及符合标准的前碰撞预警(FCW)功能,并在第5条标准实施的过渡期要求里明确规定了13个月的过渡期限。而LDWS系统和FCW系统的核心就是防撞雷达,而目前市场上能够达到防撞性能指标的只有毫米波雷达。
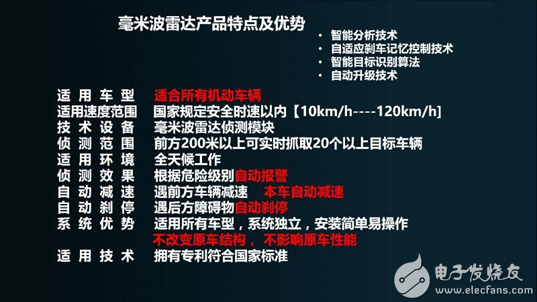
上海渭成智能科技有限公司推出符合汽车控制策略的Wayking毫米波雷达,其中24GHz的毫米波雷达已在植保无人机和工业无人机上广泛应用,77GHz的毫米波汽车雷达解决方案,基于雷达的ADAS解决方案所需的嵌入式技术,已经在国内多个车厂的客车、牵引车、货车行装主流车辆上应用。
目前,毫米波雷达是专用于机动车驾驶辅助系统ADAS(Advanced Driving Assistant System)的微波雷达传感器,主要用于主动碰撞避免或预碰撞系统(Collision avoidance system或Precrash system)、自动紧急制动系统(AEB)、自适应巡航系统ACC(Adaptivecruise control)、盲点检测BSD(Blind spot detection)、前防追尾预警(FCW)、车道改变辅助(LCA)/ 偏移报警系统LDWS( Lanedeparture warning system)、TTC 安全车距预警、后方横向交通告警(RCTA),辅助机动车完成障碍物规避功能。
在新能源汽车的展会上,名不见经传的上海渭成Wayking总工程师提到毫米波雷达应用广泛,做为汽车避障雷达使用已经得到市场认可,特别是在国内新能源汽车蓬勃发展之际,做为避障功能使用的毫米波雷达不能停留在“天线”这个层面,应该回归到探测、感知和规避这一最原始的诉求上来。电动汽车(泛指新能源汽车)开环控制系统的控制单元根据传感单元测得的信号数据,作为驾驶员选择控制策略的方案,提示驾驶员采取相应的操控行为。在开环控制单元中受控单元输出量之间,控制单元不对预期的控制目标与实际输出的结果之间产生差异进行监督,也不需要将输出量的执行结果反馈到系统的输入量端与输入量进行比较,受控单元输出量对控制系统的控制作用不产生任何影响。当控制系统受到外部干扰时,被控制的输出值可能偏离给定值,从而影响系统的控制精度。开环控制系统的抗干扰性差,在应用时有一定的局限性。
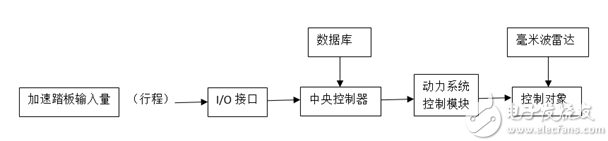
电动汽车驱动系统开环控制
开环控制系统的精确度取决于各单元控制的精确度,并需要在工作过程设法保持系统的精确度,当控制不受系统外部的扰动或系统内部的参数变化时,在输入量与输出量的关系确定时,可以采用开环控制系统,开环控制系统主要应用在:车距控制系统利用车载Wayking毫米波前防撞雷达探测本车与前车的距离,当控制单元判定本车与前车的车距小于安全车距时,立即通过控制声、光报警向驾驶员发出警告,提醒驾驶员采取减速或改变车道的操作,不发生“追尾”事故。
因为开环控制是基于“操作指导型”方案进行设计,而闭环控制属于“直接控制型”控制系统。控制单元可以根据Wayking毫米波前防撞雷达(传感器)测得多个信号数据反馈到控制系统,作为驾驶员选择控制策略的参考。
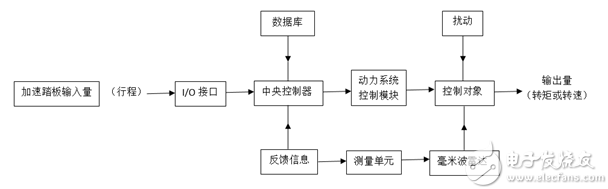
电动汽车驱动系统闭环控制
采用闭环控制策略时,驾驶员通过踩踏加速踏板的行程和强度,将控制指令输送到电动车辆的执行单元(驱动电机、控制电机等)上,实现电动汽车的启动、加速、减速和停车等动作。
由于驾驶员作用在加速踏板、制动踏板等的位移量是随机信号,输入控制单元后产生控制信号也是随机性的。同时,受控单元还会受系统外部的干扰而引起系统内部的参数变化。它们通过Wayking汽车前防撞雷达单元反馈到微处理器,用这些输出量反馈的信息与踏板的输入量进行比较,并由控制单元CUP运算得出受控单元相应的偏差值,经过放大或变换,向执行单元发生修正后的控制指令,使受控单元消除外部干扰与噪声的影响,按照高速后的指令(参数)使电动车辆的执行单元(驱动电机、控制电机等)的运行参数(启动、加速、减速和停车等)动作与控制单元经过调整的输出参数的给定值逐渐趋向一致。
采用闭环控制系统时,要尽可能避免出现“过调”现象,使得控制系统产生等幅震荡或变幅震荡,会对系统的稳定性带来影响。
- 相关推荐
- 热点推荐
- 毫米波雷达
-
ADAS和防撞系统中的毫米波雷达方案2025-04-07 2219
-
ADAS系统无人驾驶的眼睛毫米波雷达2023-04-18 2080
-
漫谈车载毫米波雷达历史2022-03-09 11855
-
毫米波雷达的特点是什么2021-07-30 7173
-
毫米波/激光/超声波雷达的区别 精选资料推荐2021-07-27 4508
-
毫米波雷达感知技术搭建车路协同系统的可行性2020-07-01 9134
-
毫米波雷达(一)2019-12-16 14664
-
车载毫米波雷达的原理是什么?2019-08-07 7404
-
车载毫米波雷达的技术原理与发展2019-05-10 5888
-
毫米波雷达方案对比2018-08-04 12216
-
毫米波雷达的应用场景_毫米波雷达技术及应用大解析2018-04-24 47692
-
毫米波防撞雷达成为汽车防撞的解决方案2018-04-18 6279
全部0条评论

快来发表一下你的评论吧 !
