

利用PLC调用ABB机器人程序号教程
描述
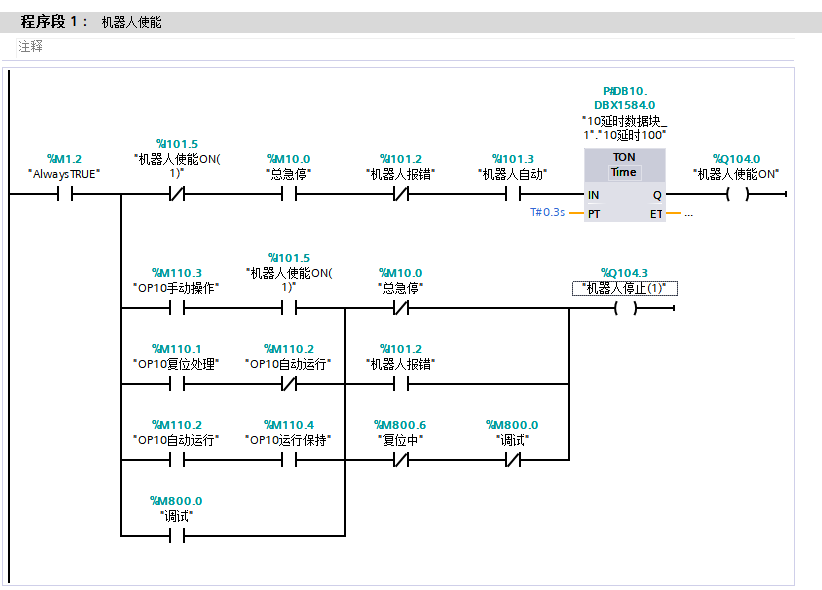
机器人使能控制程序。
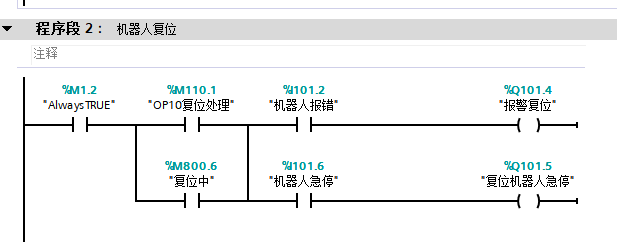
复位程序用来复位报错与急停
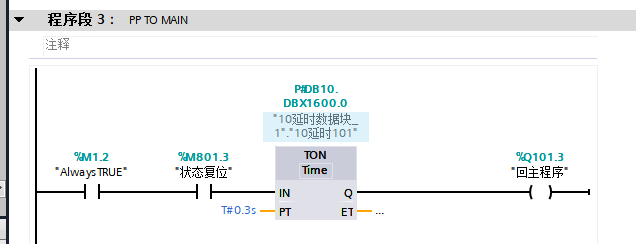
PP TO MAIN 程序是用来使机器人里的程序回到 MAIN 主程序的。
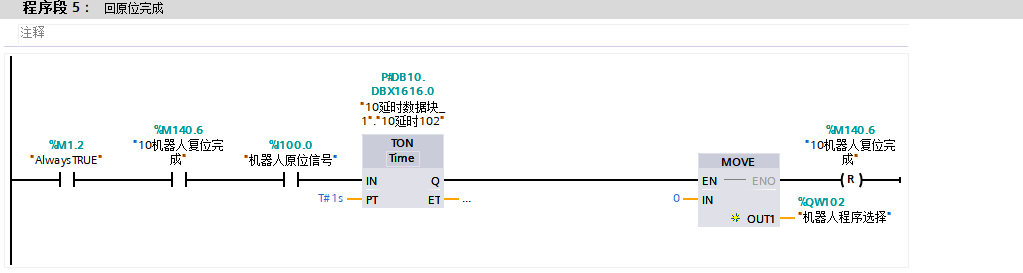
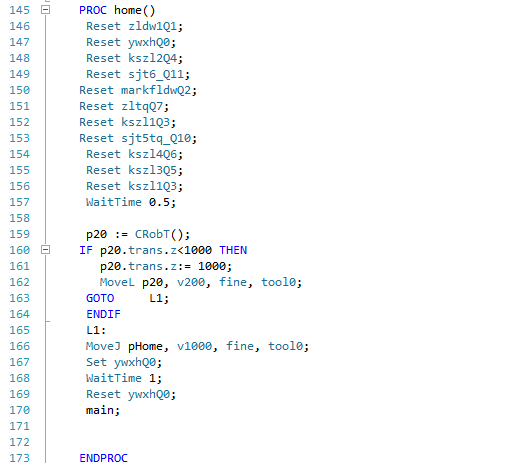
机器人回原位程序是在机器人程序中编写了一个回原位的程序,并定义为 5,这段程序意思是调用 5 程序。
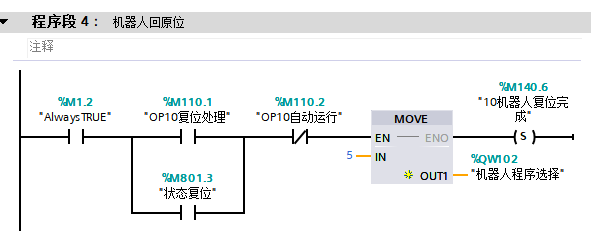
回原位程序是 5 程序执行完后使程序调用清零。
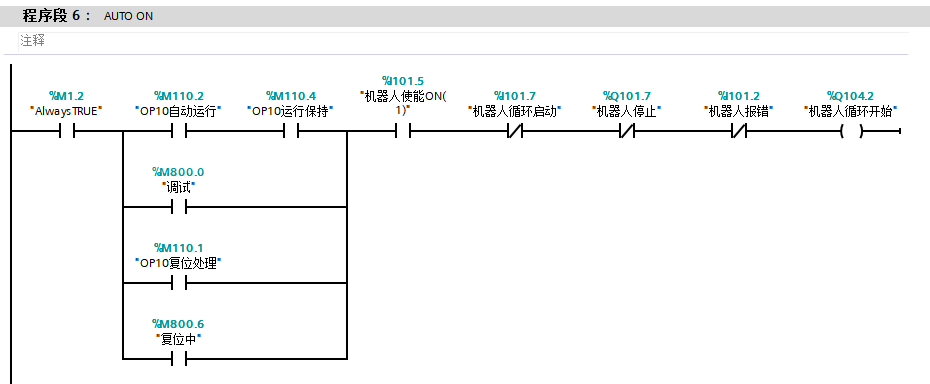
AUTO ON程序是使机器人在自动情况下保持机器人内部程序循环运行的程序。
| ABB机器人部分程序 |
| 程序可以在示教器里编辑也可以在 RobotStudio 软件里进行编辑。需要用到MOVE L、 MOVE J、 SET、 RES、 WAIT、 IF 、 TEST 等等指令,需要设定好位置点位与 I/O 点位,方便编辑时使用。 |
(1)示教器:
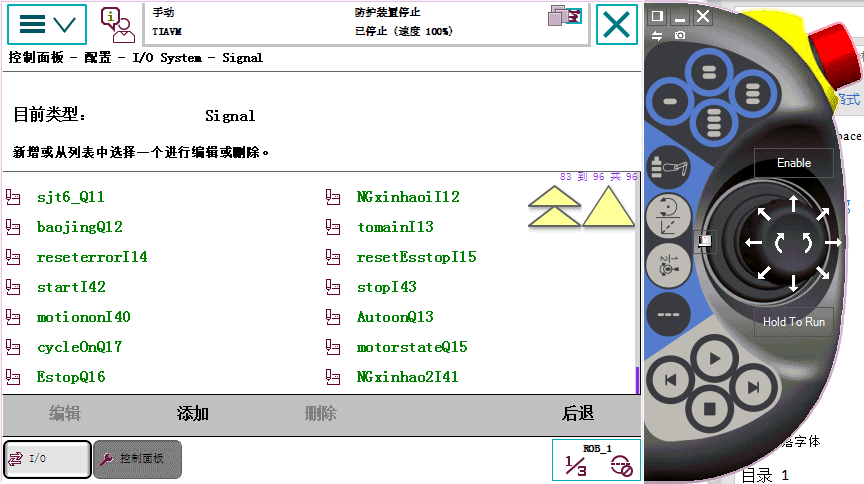
以下三张图片为配置好的 I/O 信号点
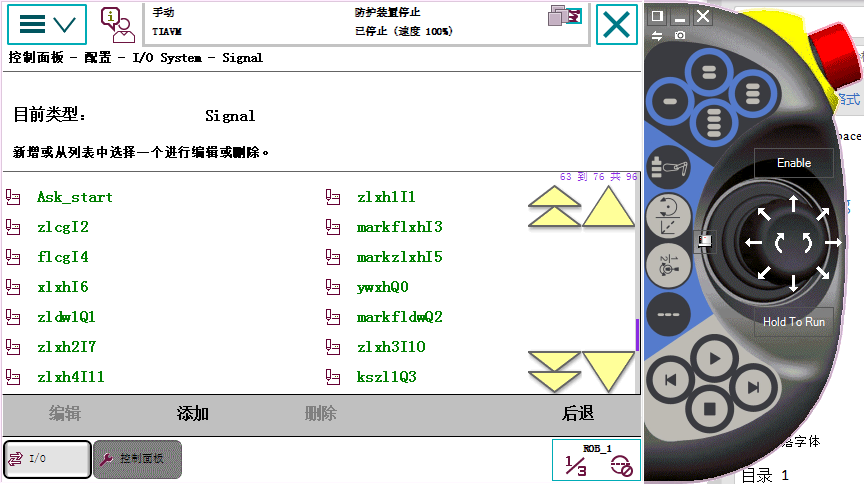
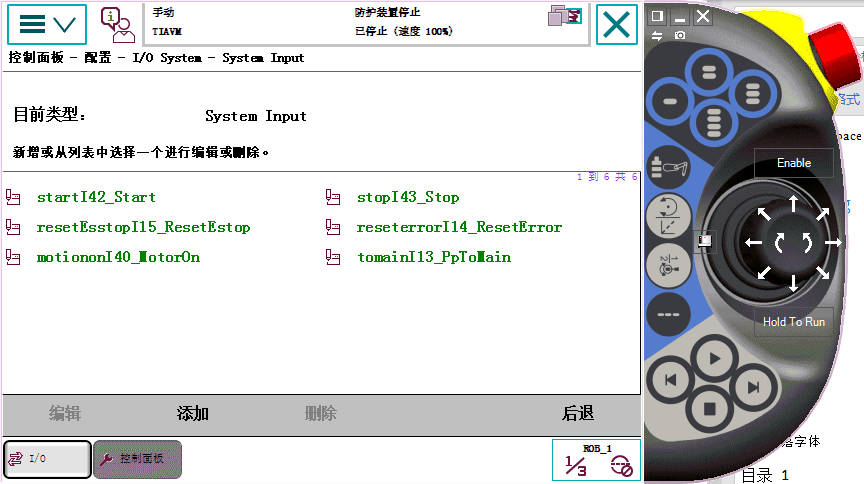
下图为配置的系统的输入点
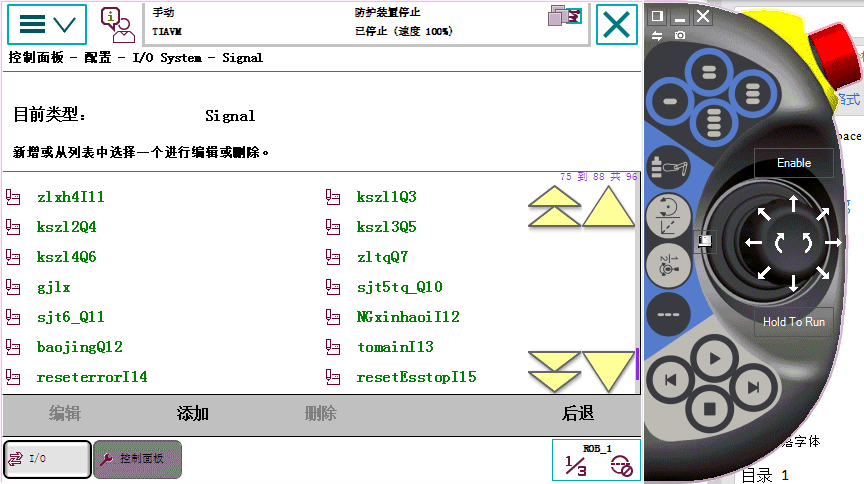
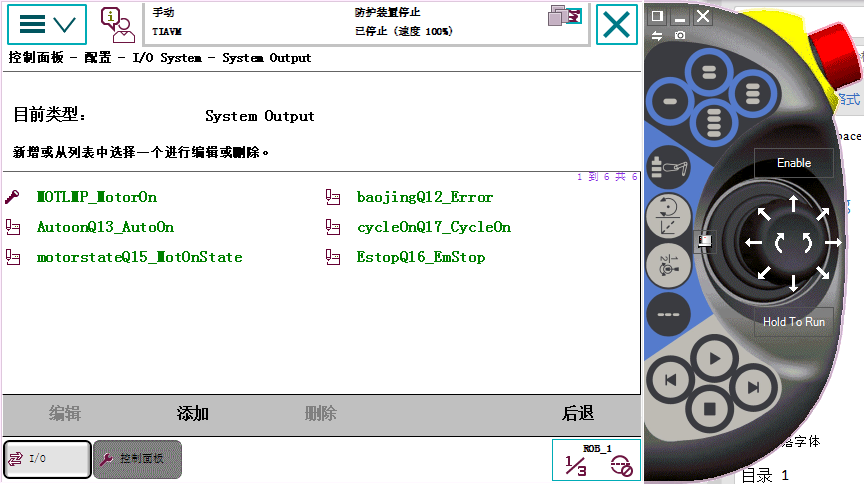
下图为配置的系统的输出点
在添加指令界面可添加需要用到的指令。
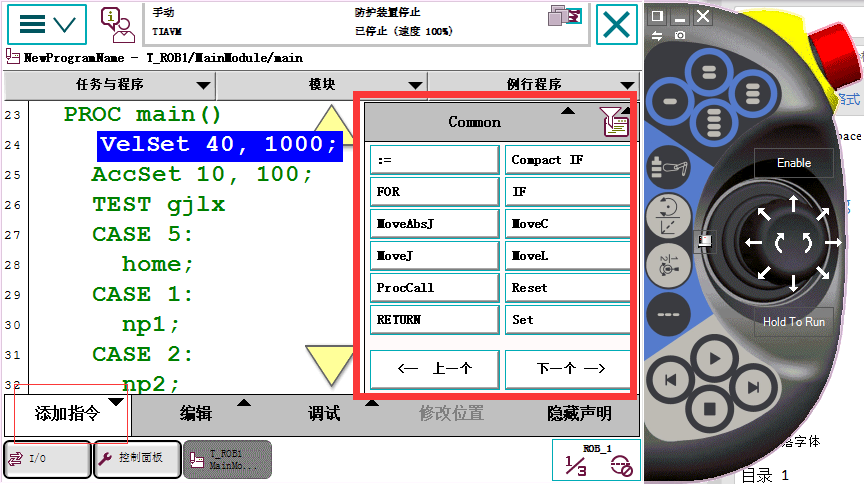
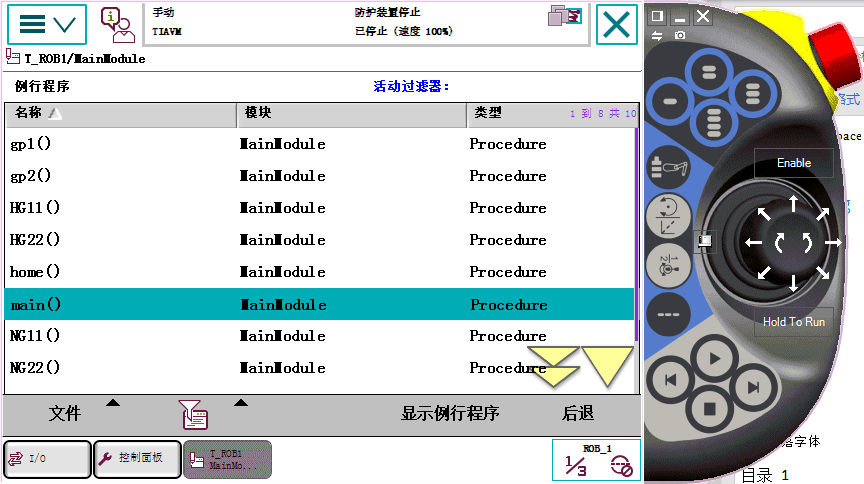
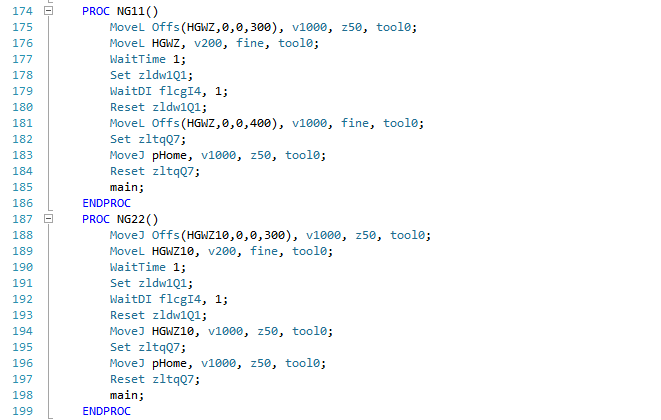
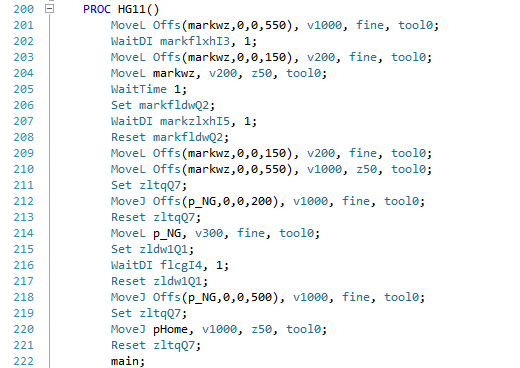
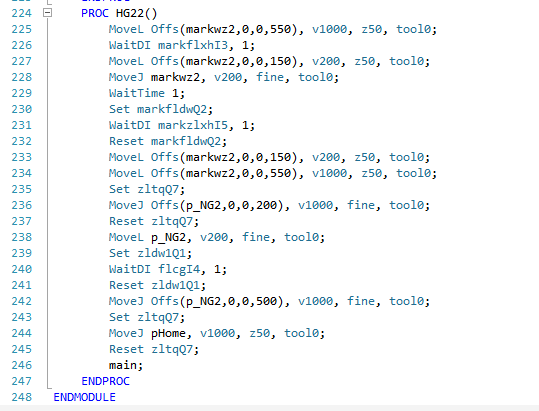
这是添加了 7 个子程序,都用 MAIN 主程序来调用。
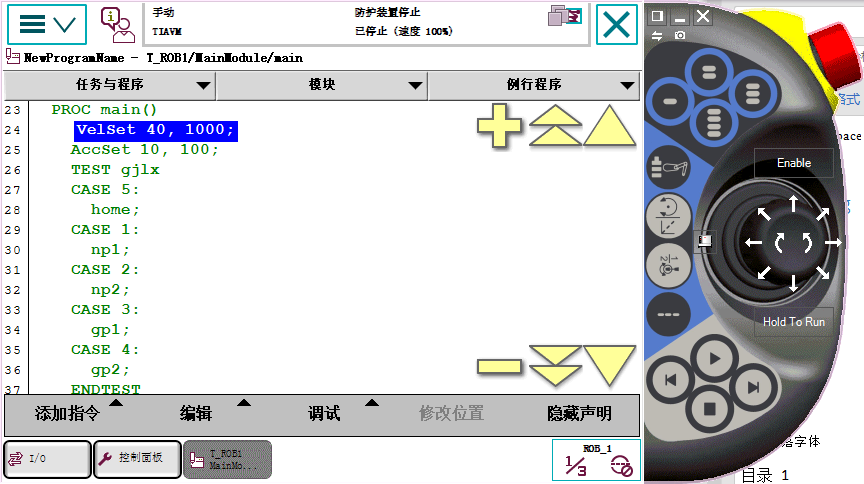
下图的意思是当 gjlx 这个点的值等于以下相对的数时,调用相对应的程序。
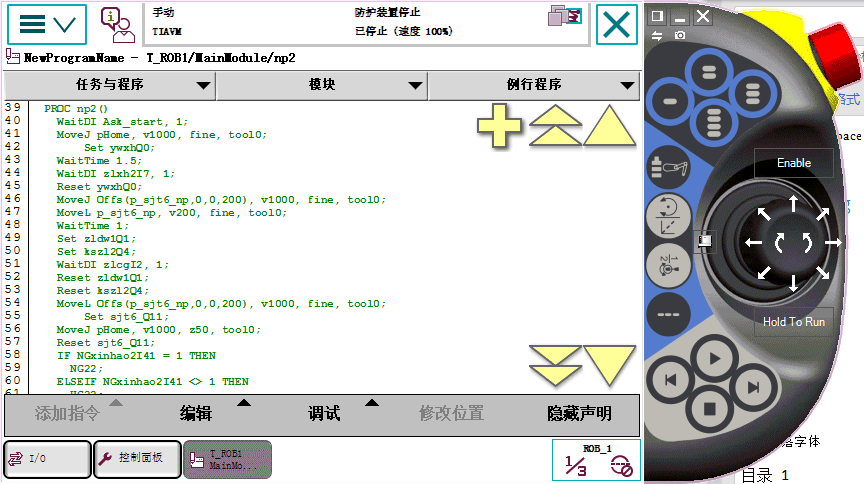
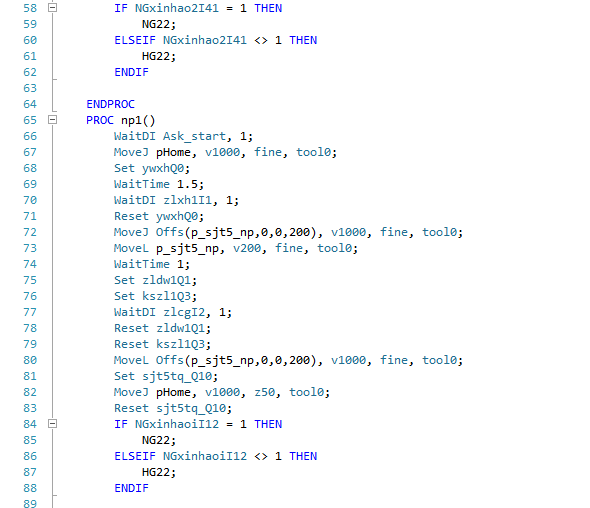
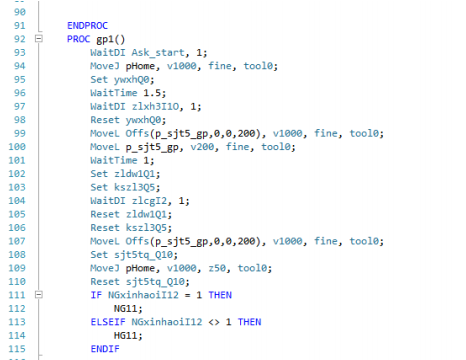
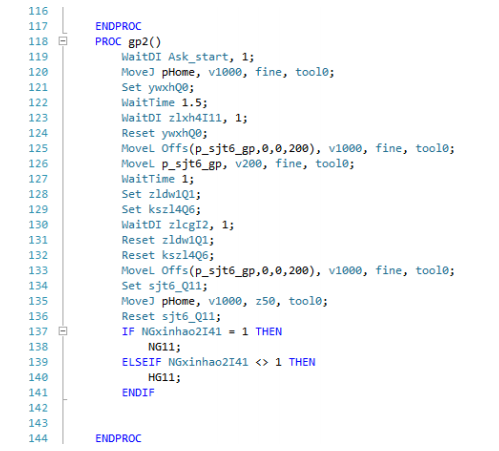
下图是一段动作程序,主要是等待开始信号,然后移动到原点后给原位信号后继续移动到(P_sjt6_np)的位置后进行置位复位,然后接收到下步信号后在进行动作,最后判定如果 NGxinhaoI41 的值等于 1 就跳转到 NG22 程序,如果不等于就跳转到 HG22 程序。
以上是在示教器里编辑的例子。
(2) RobotStudio:
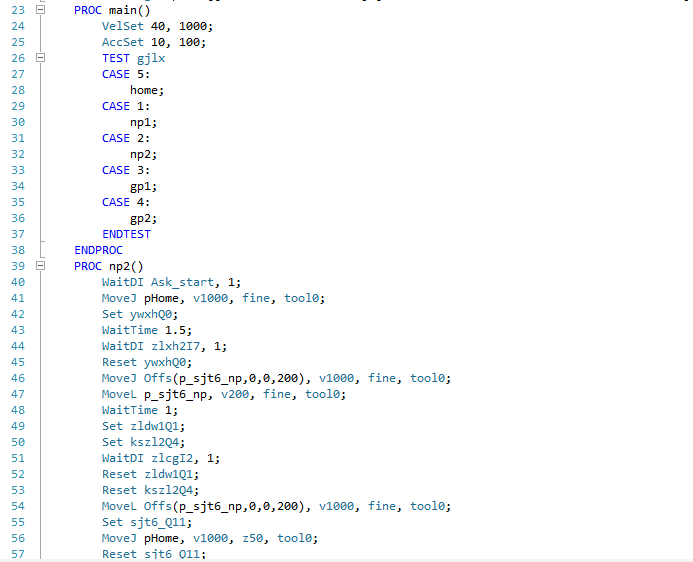
以下是用 RobotStudio 进行编辑的程序,和示教器编辑基本一样都是用指令进行编写,只要写出指令的前几位就可以有完整的指令进行选择。 示教器可以编辑细节部分的程序,电脑软件可以编辑逻辑框架。
这部分 PLC 部分的机器人程序对大部分机器人调试都适用,属于通用型的程序。机器人部分的程序需要根据现场需求进行编辑,不过 I/O 点配置及设置是通用的。 在控制机器人的时候要注意有没有干涉的位置,如果有就要注意。在编程的时候可以编辑一部分,走一步试试要注意逻辑通顺就可以了。
来源:机器人及PLC自动化应用
-
ABB机器人与西门子PLC通讯案例2025-02-02 5052
-
ABB机器人的基本程序数据有哪些2024-06-17 3423
-
ABB机器人程序结构总结2023-05-25 9382
-
ABB机器人程序和功能的应用2023-05-19 11190
-
ABB机器人线速度_青岛ABB机器人发生电源故障维修2022-01-11 2513
-
ABB机器人实训平台实验2021-07-01 2788
-
机器人螺柱焊程序号选不上怎么怎么解决?2020-10-09 2808
-
ABB机器人维修保养指南2020-08-19 6037
-
ABB机器人指令模块介绍与开发过程2019-10-21 9538
-
基于ABB机器人的应用协议RAP2017-10-16 1475
-
ABB机器人程序指令汇总2015-12-23 1866
-
ABB IRB5400-喷涂工业机器人2015-01-14 10159
全部0条评论

快来发表一下你的评论吧 !
