

一个FOR循环完成多个伺服轴的实例化方法
描述
来源:博途之友;作者:张浩杰
阶段“优秀工程师之路
编者说:一次博途之友的群交流时,我问大家:轴控应用库,大家用的多吗?工程师作者说:最近刚刚使用上,很方便。使用官方的库,二次封装成多重背景数据块,一个循环完成所有轴的实例化调用。
马上请他分享一下应用经验。
在最近的项目中,我遇到了多轴协同控制的需求。由于现场工艺要求,单机设备可能需要根据实际情况动态增减轴数量。如果采用逐个调用独立指令的方式,不仅后期调试会变得异常繁琐,而且若不符合PLCopen规范,还容易导致轴控异常报警,故障排查将十分困难——这种方案显然不具备可行性。
虽然考虑过自行封装轴控功能块,但考虑到需要投入大量时间进行验证测试,短期内难以保证稳定性,这个想法只能暂时搁置。
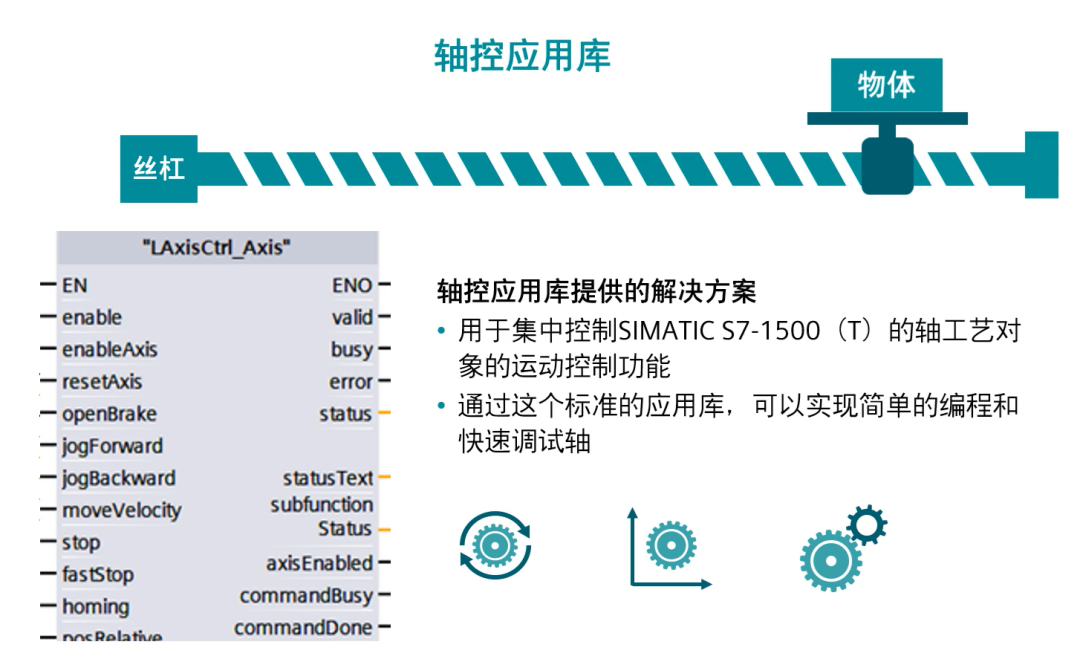
经过一番调研,我欣喜地发现了官方提供的标准化轴控库解决方案。官方库文件几乎涵盖了轴控的所有常见应用场景,主要提供两种类型的控制库:LAxisCtrl_PosAxis和LAxisCtrl_DBAnyBased。通过查阅技术手册发现,这两种库在接口类型和资源占用方面存在明显差异,后者对系统资源的消耗更大。有了官方认证的标准化轴控库,不仅完全符合PLCopen规范,还免去了自行开发的诸多风险,这让我对轴控封装成标准化充满信心!
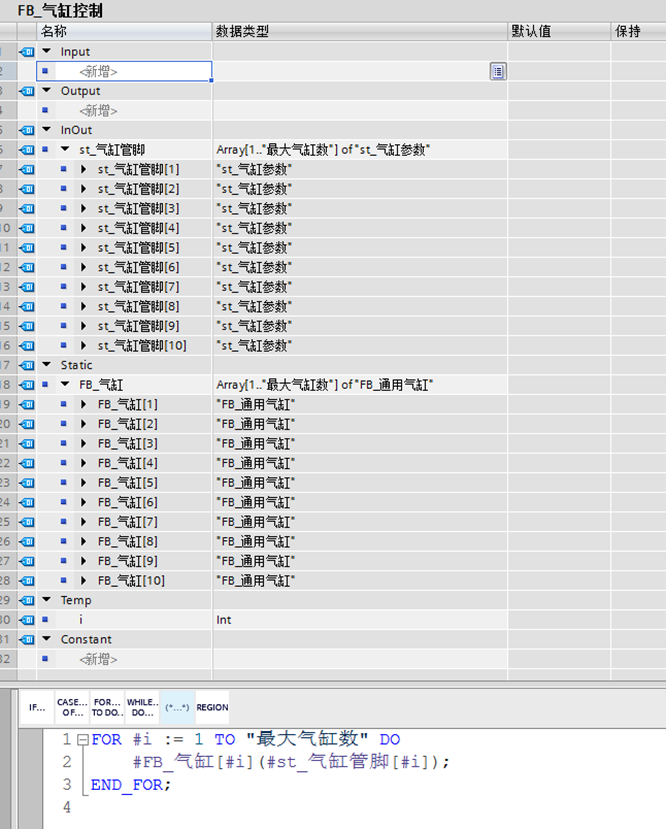
按照常规思路,本打算创建一个FB功能块,直接调用官方库中的"LAxisCtrl_PosAxis"模块。要么将其定义为数组类型,要么自定义包含轴控接口的数据结构再进行数组化(就像处理气缸实例化那样简单直接)。标准化和模块化是提升开发效率和维护便利性的关键。以气缸控制为例,引入"最大气缸数"这一全局常量,实现了气缸实例化的标准化管理。当设备配置变更需要调整气缸数量时,仅需修改该常量值即可自动适配所有相关控制逻辑,这种设计理念极大地简化了系统配置和维护工作。
所有气缸实例化
主程序调用

然而,实际情况比预期要复杂许多,经过多次试验验证,系统在输入接口管脚处存在以下关键限制:
1、不支持对TO_PositioningAxis类型的数组引用,仅允许单个TO_PositioningAxis数据类型;
2、静态参数引用功能缺失;
3、无法直接对官方提供的控制库进行数组化引用。
如果不能循环引用的话,达不到我的标准化需求,那么做这个块的意义就不大了。于是我又测试一个LAxisCtrl_DBAnyBased的库,结果还是一样不支持。但发现了一种新的数据类型DB_ANY,一查原来是万能的数据类型。那么能不能指向TO_PositioningAxis呢?答案是可以的,但是不能直接使用,需要转换一下。


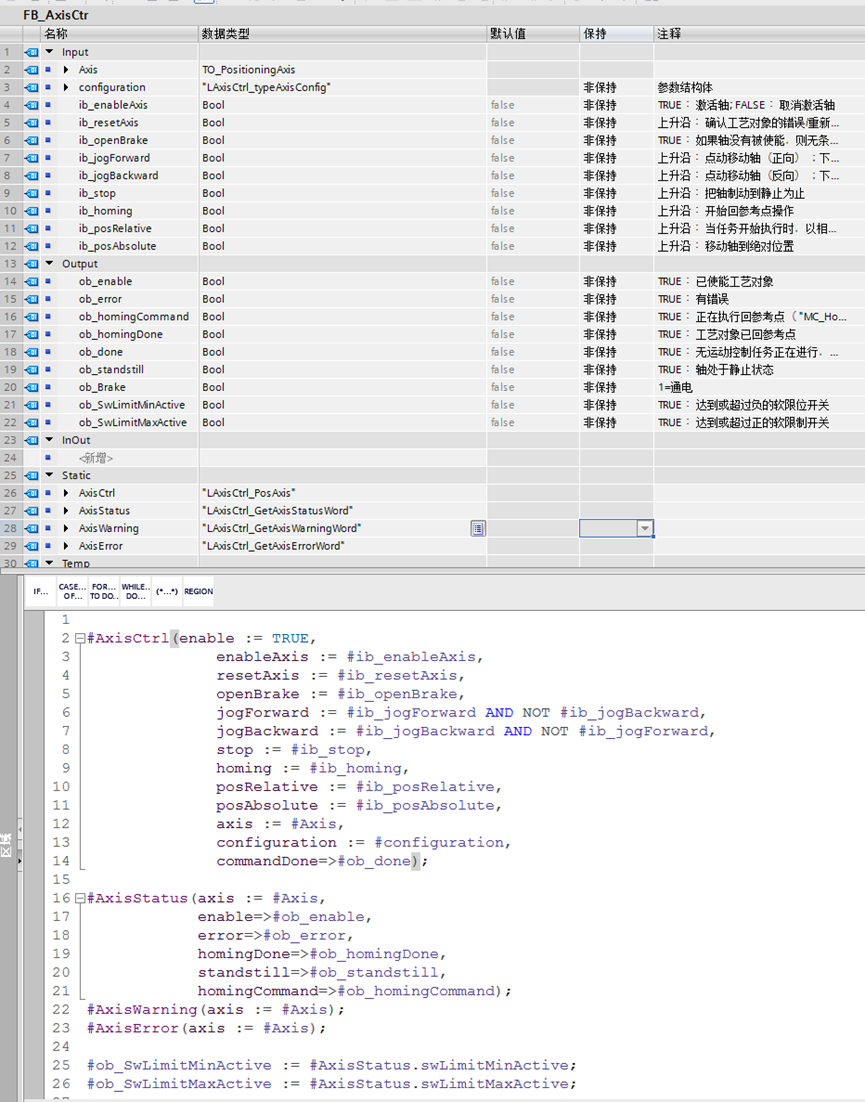
经过测验发现"LAxisCtrl_PosAxis"库只能创建为静态参数,那么新思路:先封装一个单轴带参数引脚的FB块>>再创建一个FB轴实例块对其单轴FB块循环调用>>最后主程序调用FB轴实例块。
基础层:封装单轴控制FB块,集成所有运动控制、状态监控和参数配置功能
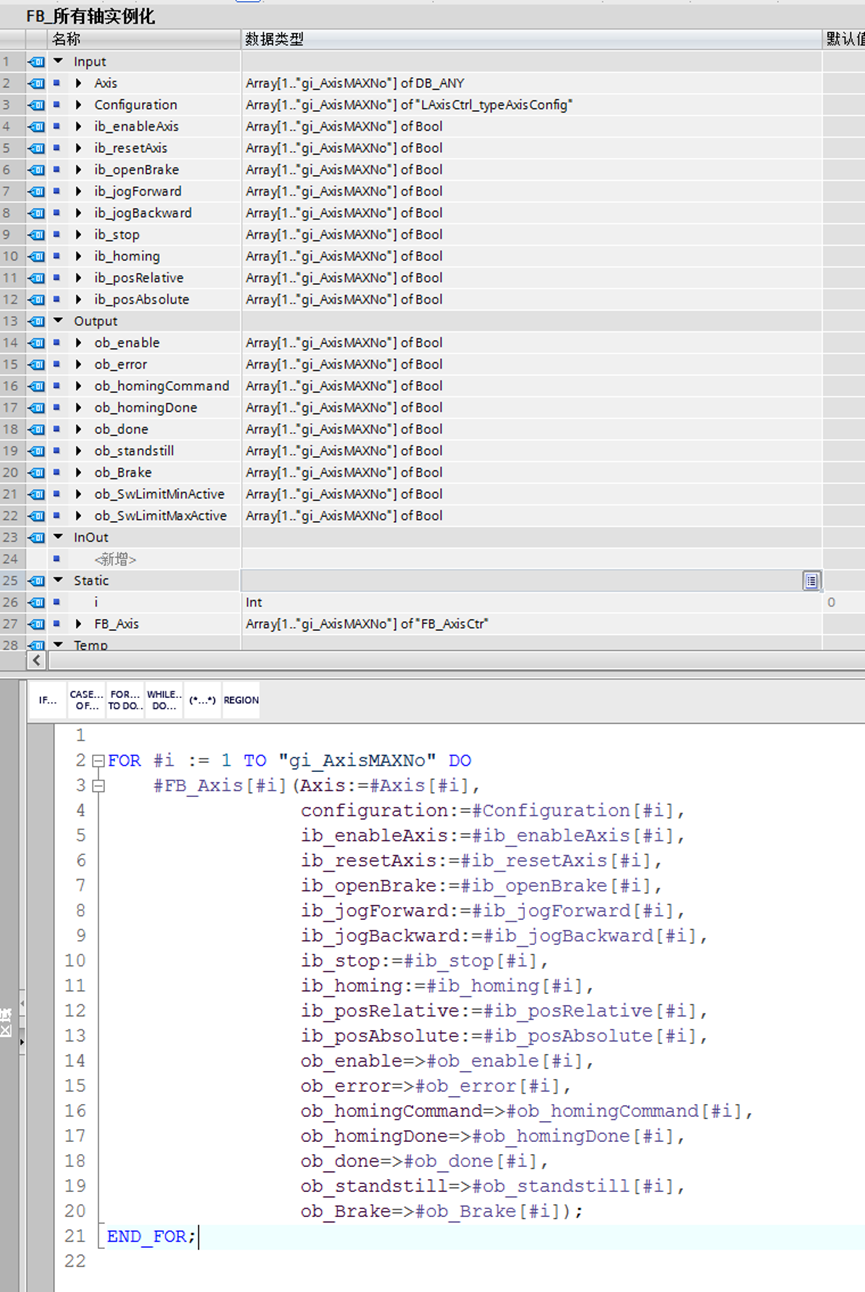
管理层:开发轴管理FB块,通过循环调用机制管理多个单轴实例,提供统一接口
应用层:主程序只需调用管理块,通过修改’gi_AxisMAXNo’常量即可调整轴数
一、基础层:单轴FB块的封装
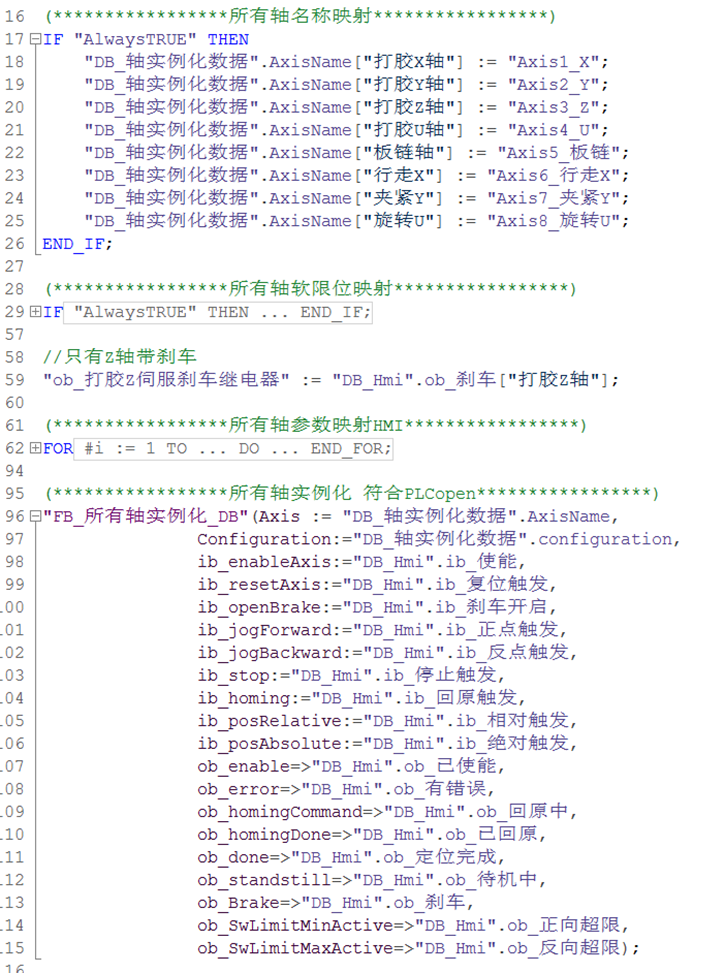
二、管理层:FB轴实例化
三、应用层:
1、Main调用
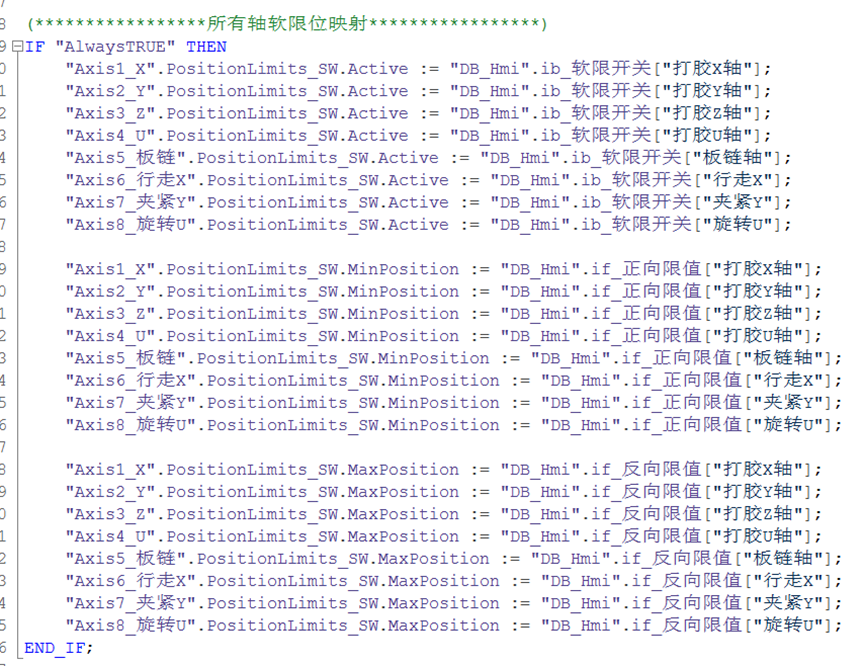
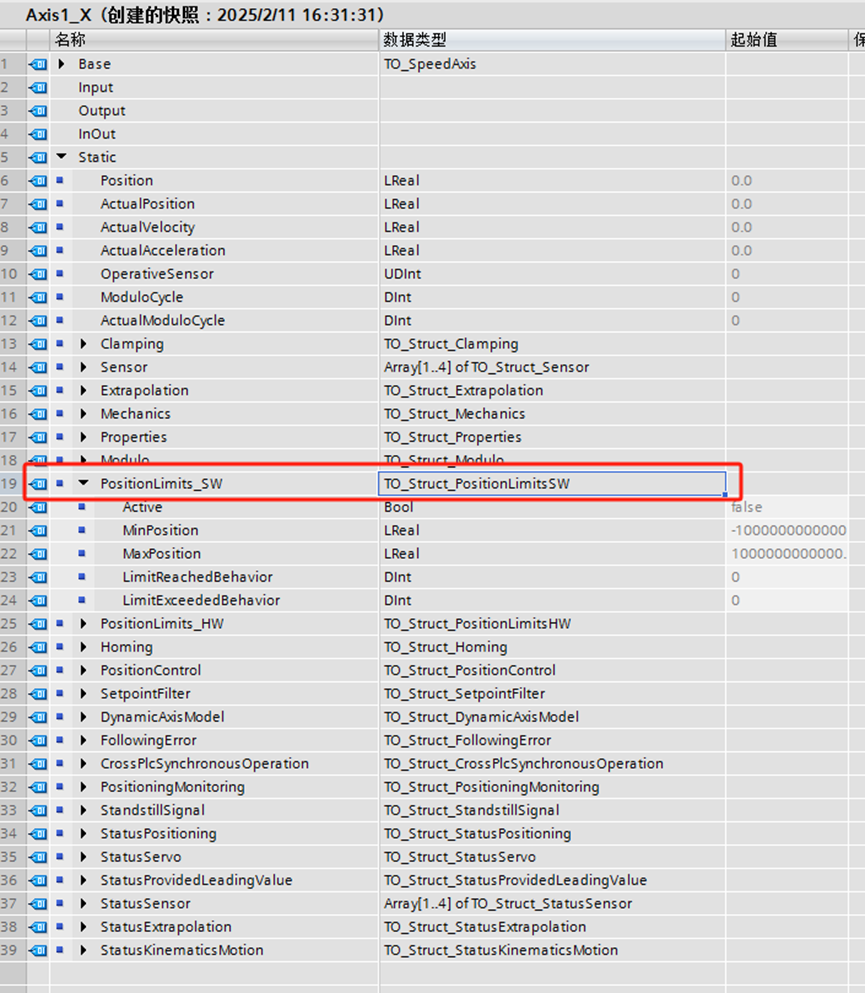
2、轴限位
值得注意的是,若是想开放软限位值,只能通过Axis DB块下PositionLimits_SW结构体实现。
-
【FPGA设计实例】用FPGA实现R/C伺服控制2012-03-14 5879
-
通过拖曳的方法改变一个已经初始化X轴位置的游标的位置2015-04-17 2966
-
多轴伺服控制同步精密运动2016-01-25 7865
-
LabVIEW一个程序中放置多个多个While循环,其中的一个循环执行缓慢2016-03-17 12181
-
如何使用动态事件停止多个while循环2016-10-25 6343
-
使用ODDR转发多个时钟是否必须实例化几个ODDR?2018-11-02 4829
-
请问如何在Vivado项目中实例化hdl系统生成器输出的多个实例》2020-07-31 2328
-
FANUC伺服轴的屏蔽2011-04-26 4019
-
伺服轴的屏蔽方法2017-10-09 2830
-
一种自动生成循环摘要的方法2017-12-29 1065
-
如何使用一个PLC控制两个或多个伺服电机同步运行2019-07-18 32398
-
西门子Profinet总线控制多轴伺服用方法2020-09-22 56463
-
基于HPM6750的三轴伺服运动控制方案2022-11-24 3270
-
LTspice:将多个模型实例组合成一个符号2023-01-08 3415
-
多轴伺服,一芯搞定2023-10-19 1580
全部0条评论

快来发表一下你的评论吧 !
