

开疆智能EtherCAT转CANopen网关连接台达伺服驱动器配置案例
描述
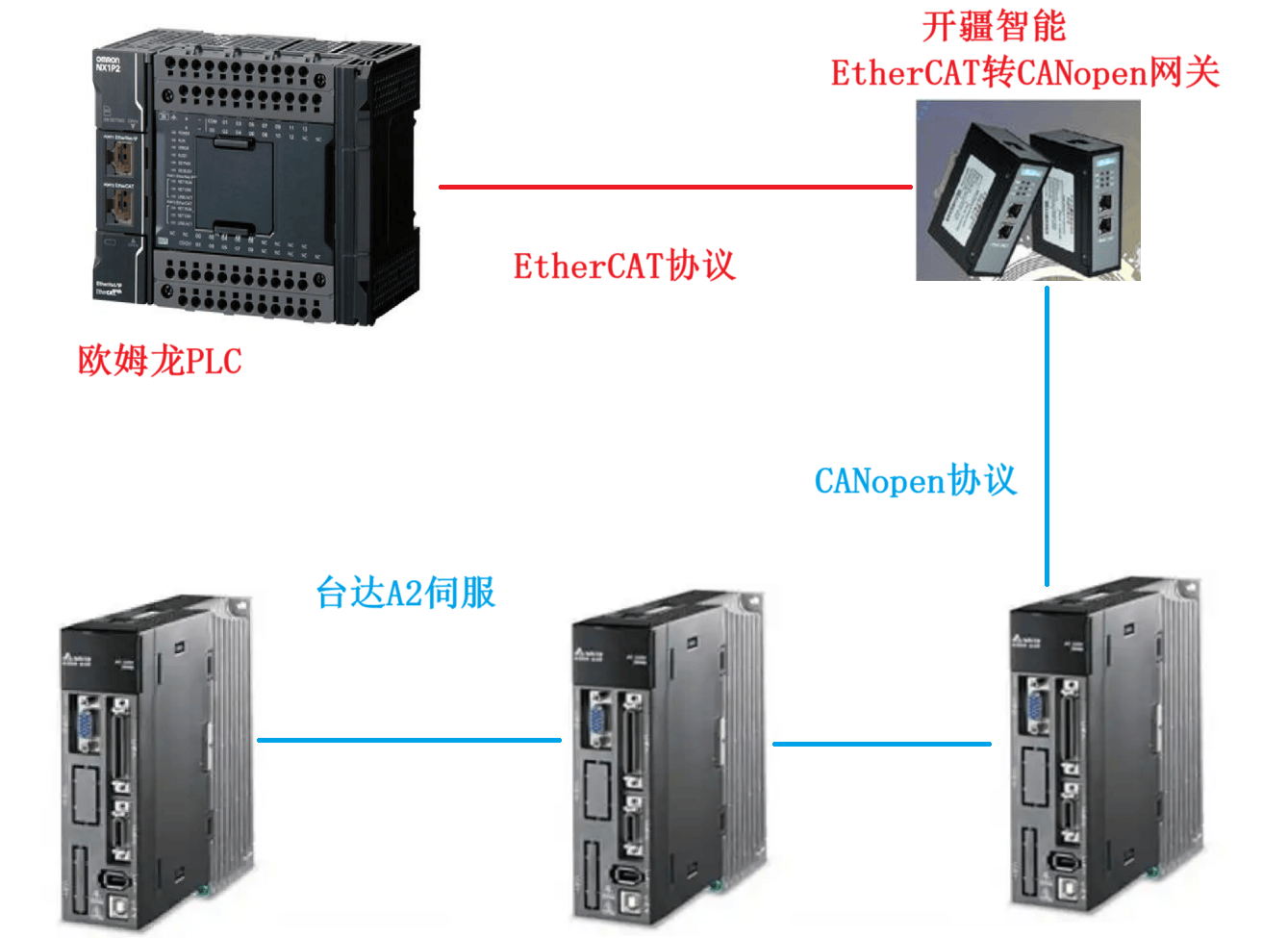
本案例是欧姆龙PLC通过EtherCAT转CANopen网关控制台达伺服的配置案例
具体配置方式如下。
配置过程:
PLC配置
1. 打开欧姆龙配置软件Sysmac Studio
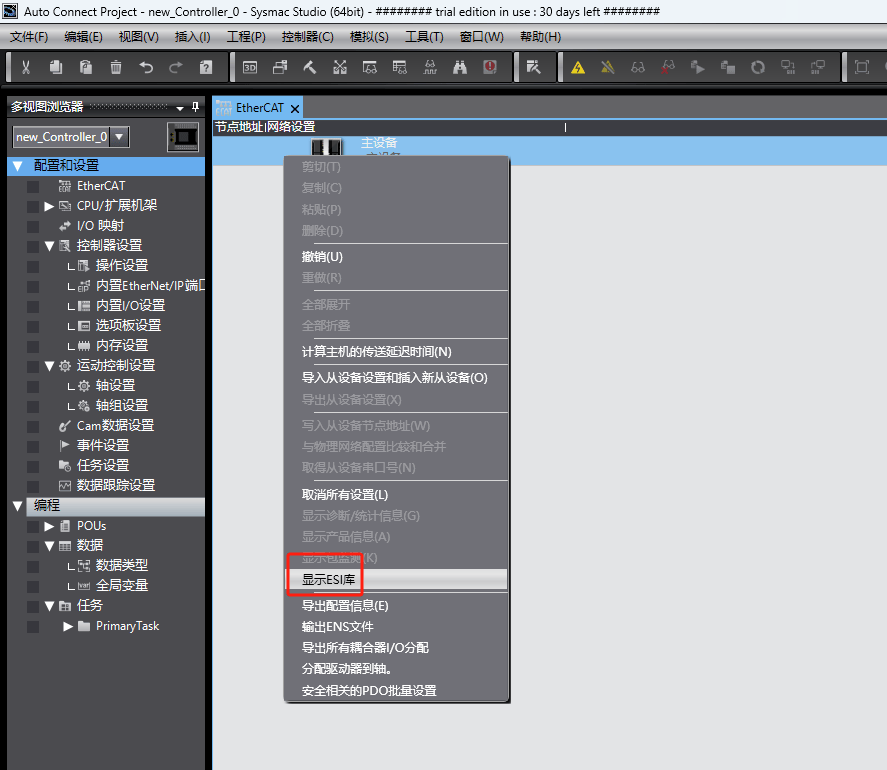
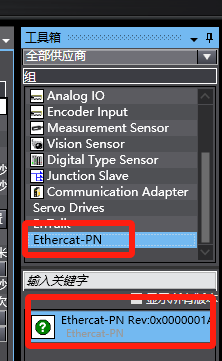
2. 双击EtherCAT,在主设备处右键选择显示ESI库
3. 在弹出的对话框中选择安装文件
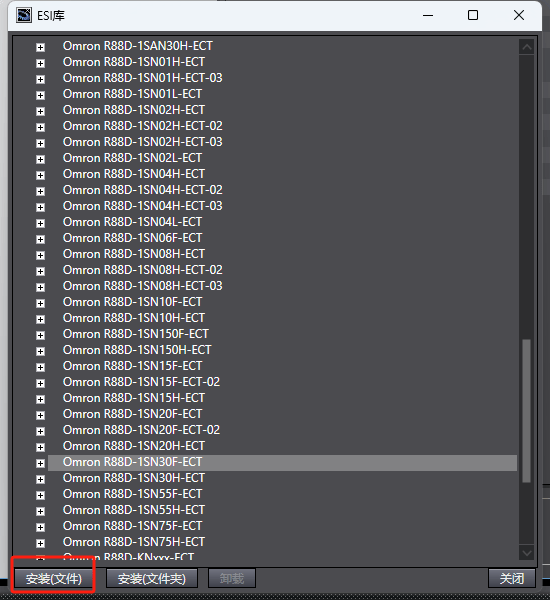
4. 选择网关的ESI文件
5. 添加完成后选择Ethercat-PN
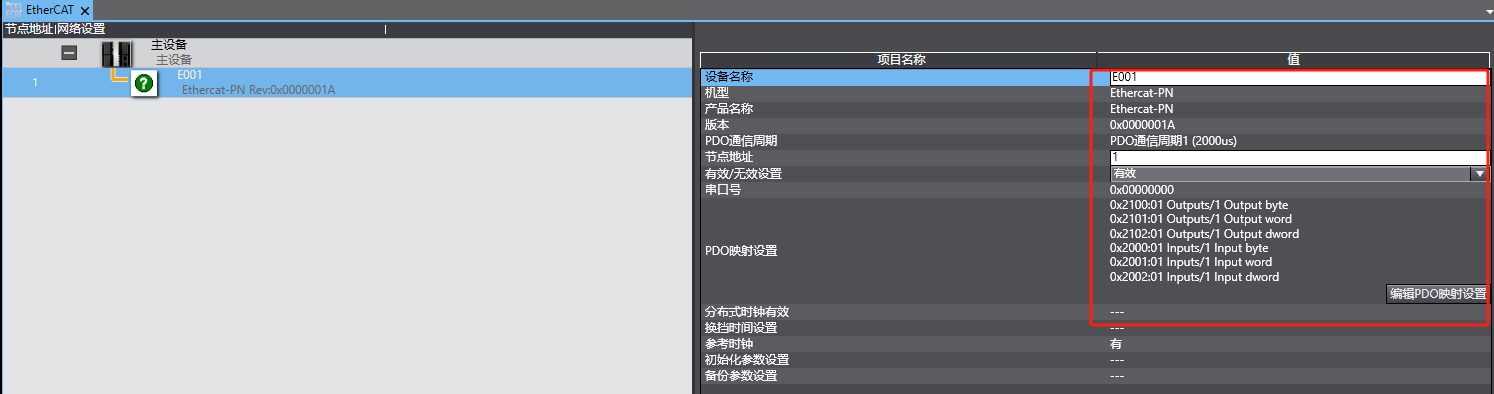
6. 1设置好网关参数
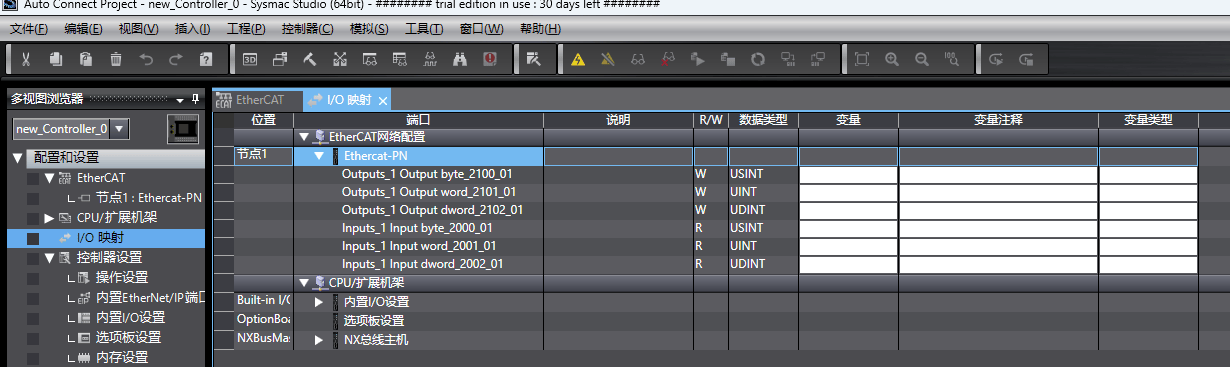
7. 打开IO映射设置好变量
8. 将PLC在线,在主站处右键选择与物理网络配置比较和合并
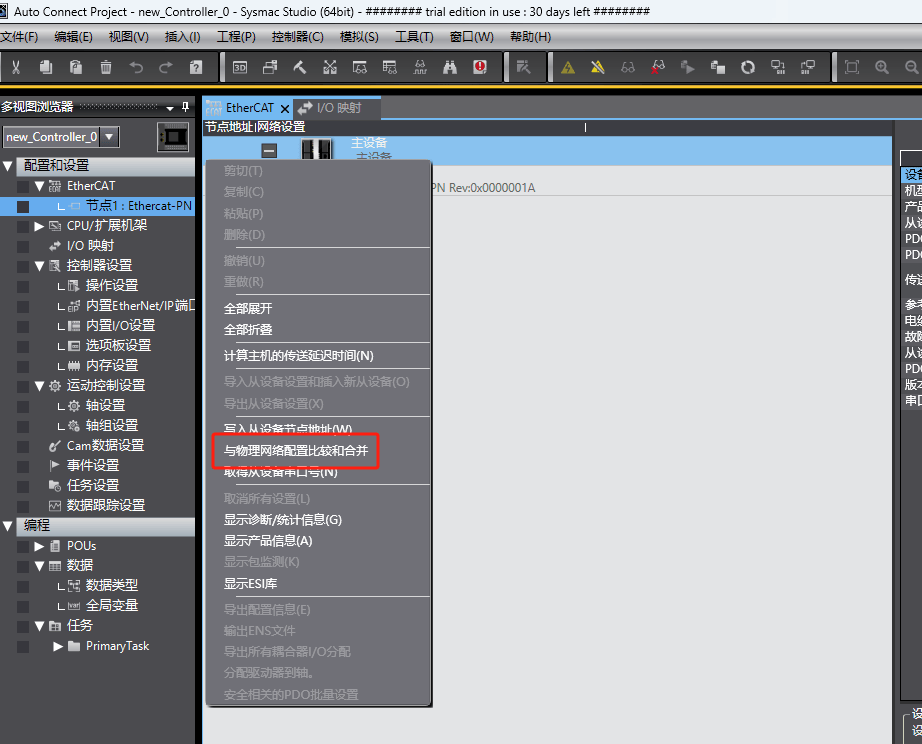
9. 完成后将组态下载至PLC
网关配置
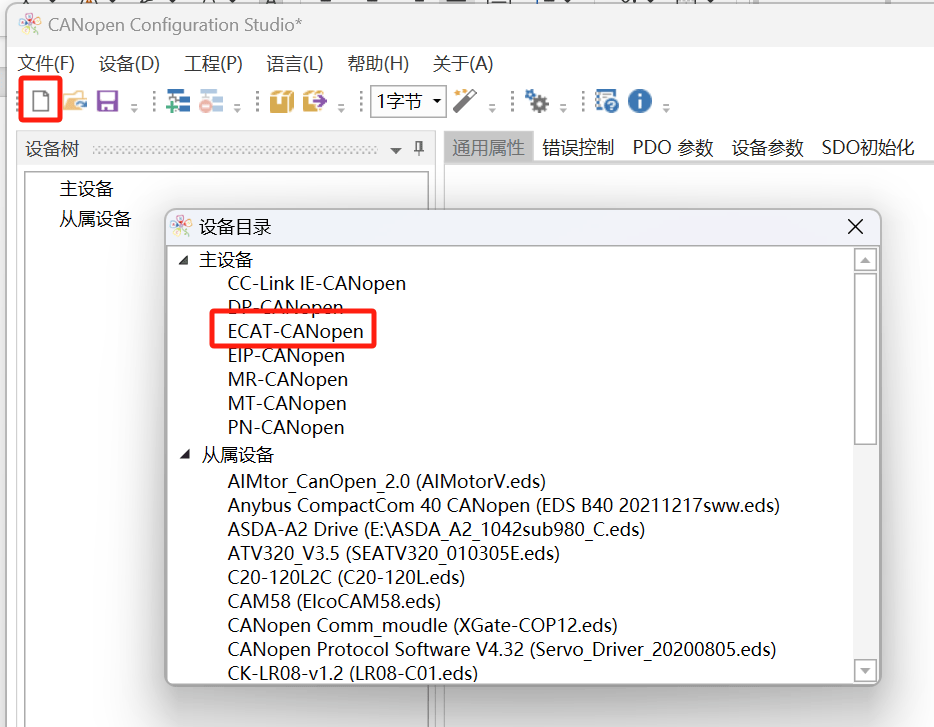
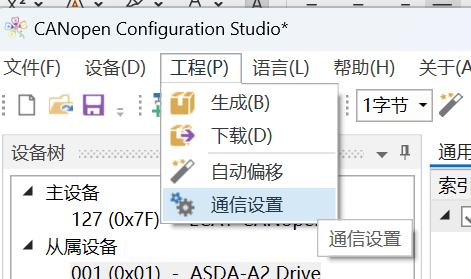
打开网关配置软件“CANopen Configuration Studio”新建项目选择“ECAT-CANopen”
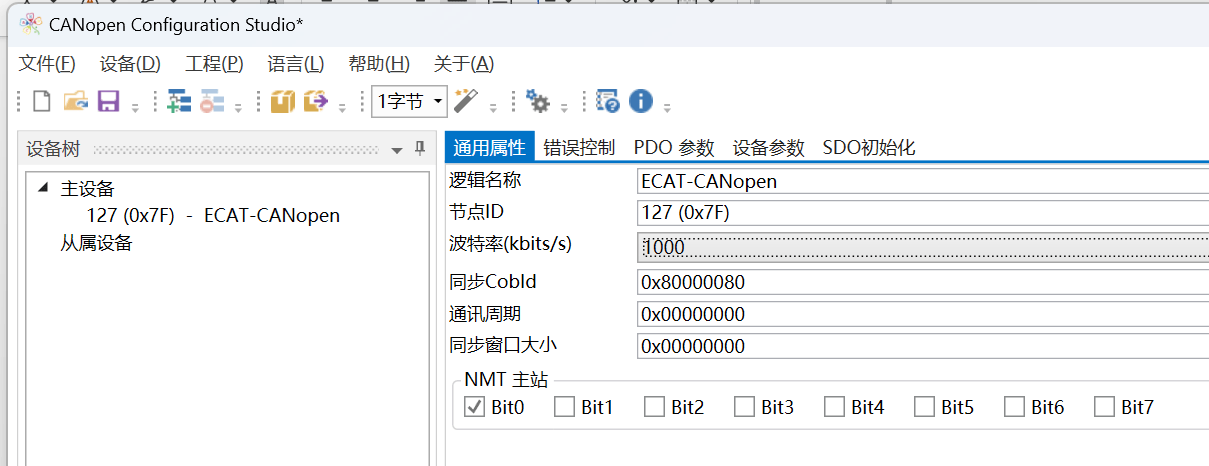
设定网关的canopen一侧波特率,和从站保持一致
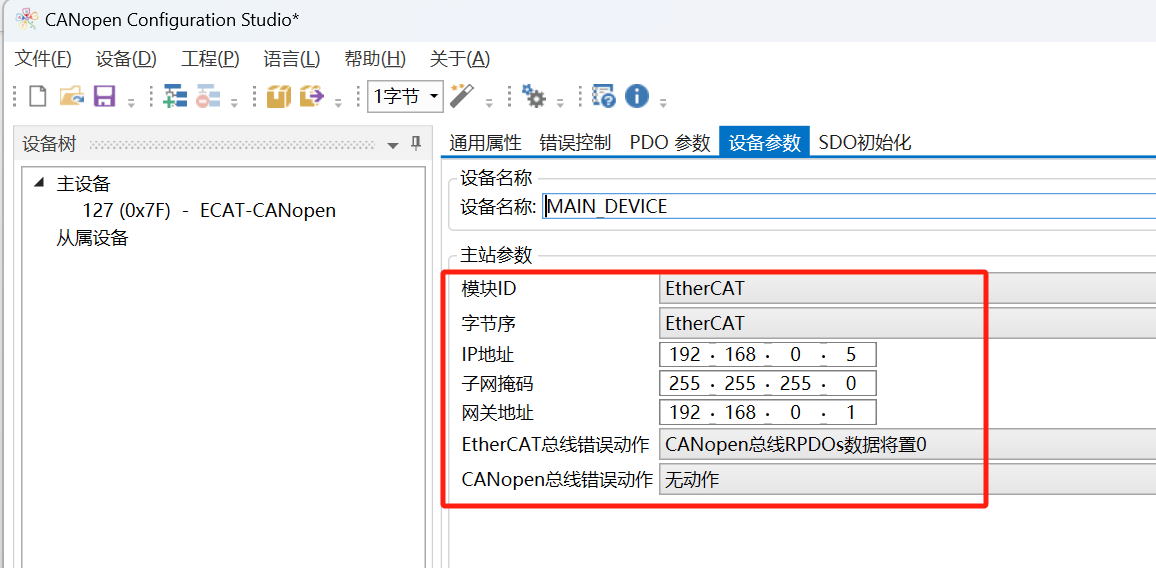
设置网关的字节序,下载IP以及掉线后网关的数据处理方式。
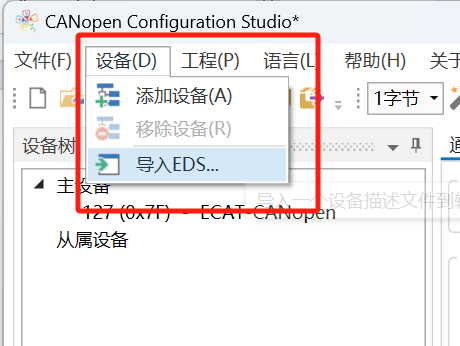
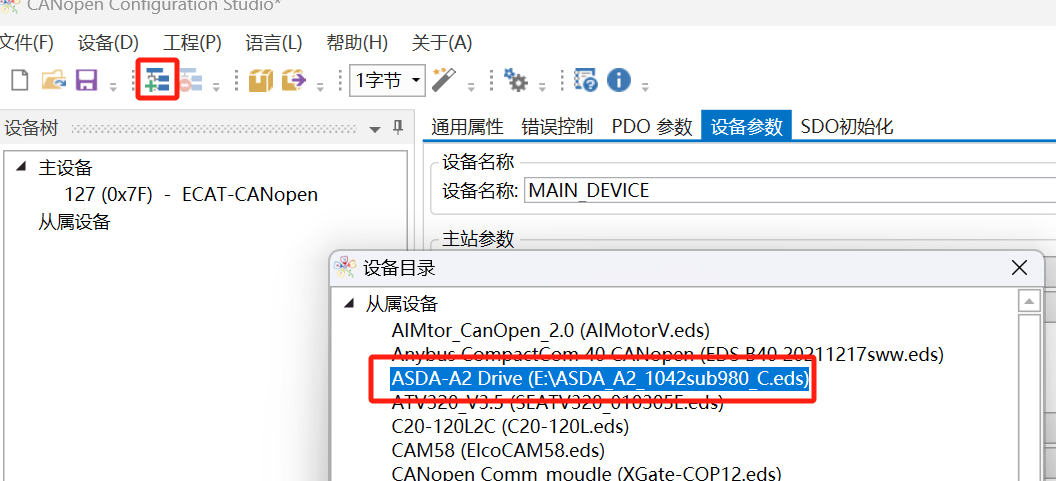
完成后点击设备-导入EDS文件(从站EDS文件可从伺服官网下载)
点击添加从站,每个从站分别配置站地址(此处我们以1台设备为例)
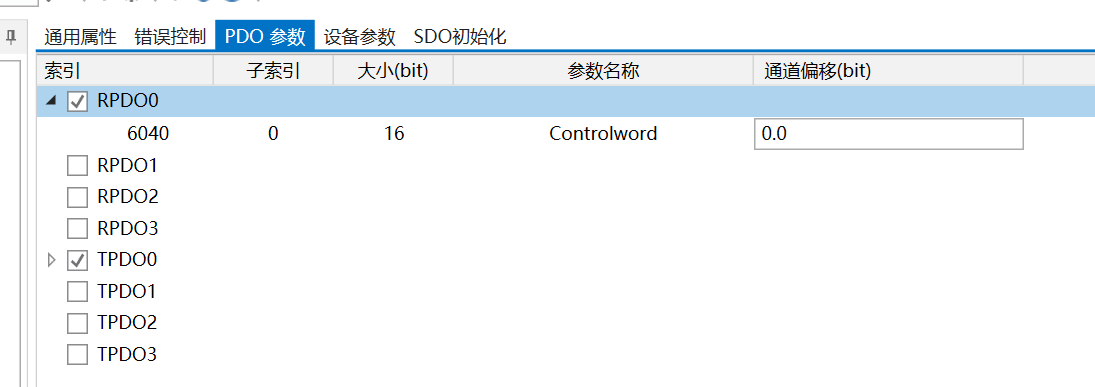
勾选要用到的PDO添加参数,添加需要用到的索引
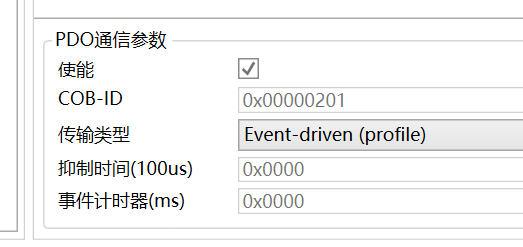
设定每个PDO的通讯参数(如传输类型,周期时间等)
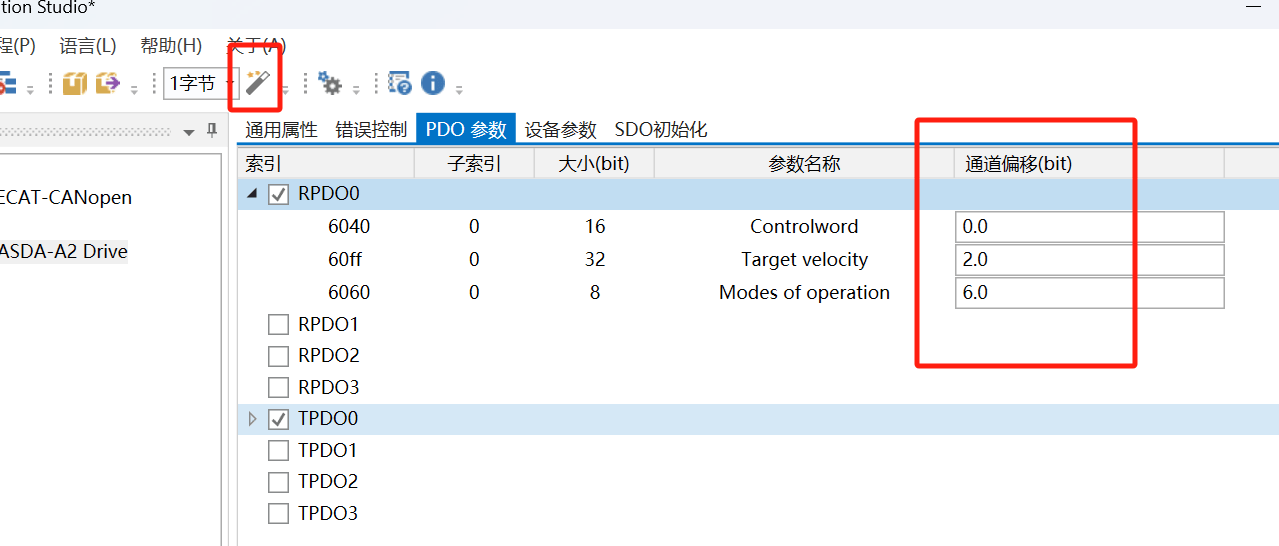
设置完参数后,点击自动分配内存映射设置通道偏移。
设置完成后点击通信设置,扫描网关IP后点击生成-下载即可把配置下载进网关。
通讯正常后读写CANopen从站数据即可。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
开疆智能EtherCAT转CANopen网关连接UV灯配置案例2025-07-13 862
-
开疆智能CCLinkIE转CANopen网关连接施耐德变频器配置案例2025-07-05 1345
-
开疆智能CCLinkIE转CANopen网关连接步科伺服驱动器配置案例2025-07-02 958
-
开疆智能CCLinkIE转Canopen网关连接台达伺服驱动器配置案例2025-06-30 934
-
开疆智能ModbusTCP转CClinkIE网关连接台达DVP-ES3 PLC配置案例2025-06-28 2030
-
开疆智能ModbusTCP转Canopen网关连接AB PLC与台达伺服通讯案例2025-06-10 774
-
开疆智能CanOpen转Profinet网关连接台达伺服2023-10-08 1847
-
伺服驱动器连接Ethercat转profinet网关应用2023-09-04 2134
-
CanOpen转Profinet网关连接SD100伺服驱动器与PLC配置案例2023-09-01 777
-
EtherCAT转Profinet网关连接Microflex E190伺服器配置案例2023-06-01 620
-
应用案例丨伺服驱动器连接Ethercat转profinet网关2023-05-18 2289
-
伺服驱动器连接Ethercat转profinet网关应用案例2023-05-16 1870
-
Profinet转Canopen网关连接MOTEC伺服配置案例2023-04-15 2056
-
求CANOpen转PROFINET网关连接东元伺服驱动器配置案例2021-11-15 1841
全部0条评论

快来发表一下你的评论吧 !
