

NVIDIA Isaac Lab可用环境与强化学习脚本使用指南
描述
NVIDIA Isaac Sim 是一款基于 NVIDIA Omniverse 构建的参考应用,使开发者能够在基于物理的虚拟环境中模拟和测试 AI 驱动的机器人开发解决方案。NVIDIA Isaac Lab 是一个适用于机器人学习的开源模块化框架,其模块化高保真仿真适用于各种训练环境,Isaac Lab 同时支持模仿学习(模仿人类)和强化学习(在尝试和错误中进行学习),为所有机器人具身提供了灵活的训练方法。它能够为各种训练场景提供用户友好的环境,帮助增加或更新机器人技能。
在上一篇的机器人仿真教程里,我们教大家如何安装 Isaac Sim 4.5.0 以及 Isaac Lab 2.0,本篇教程将带大家了解 Isaac Lab 2.0 的可用环境以及如何使用强化学习脚本进行配置。
一、Isaac Sim 预置资产库
Isaac Sim 中提供了丰富的预置资产库,这些资产是构建机器人仿真场景的基石。所有资产均经过物理属性优化,可直接用于高精度仿真。
我们可以在 Isaac Sim 窗口下方的“Isaac Sim Assets[Beta]”菜单栏进行查看,资产会在线加载并提供预览。
二、Isaac Lab 强化学习环境
Isaac Lab 提供了开箱即用的强化学习环境,可与 Isaac Sim 资产库深度集成。
Single-agent 环境列表
首先,在 Isaac Lab 文件夹运行以下脚本,将会列出最新的可用环境列表。
./isaaclab.sh -p scripts/environments/list_envs.py
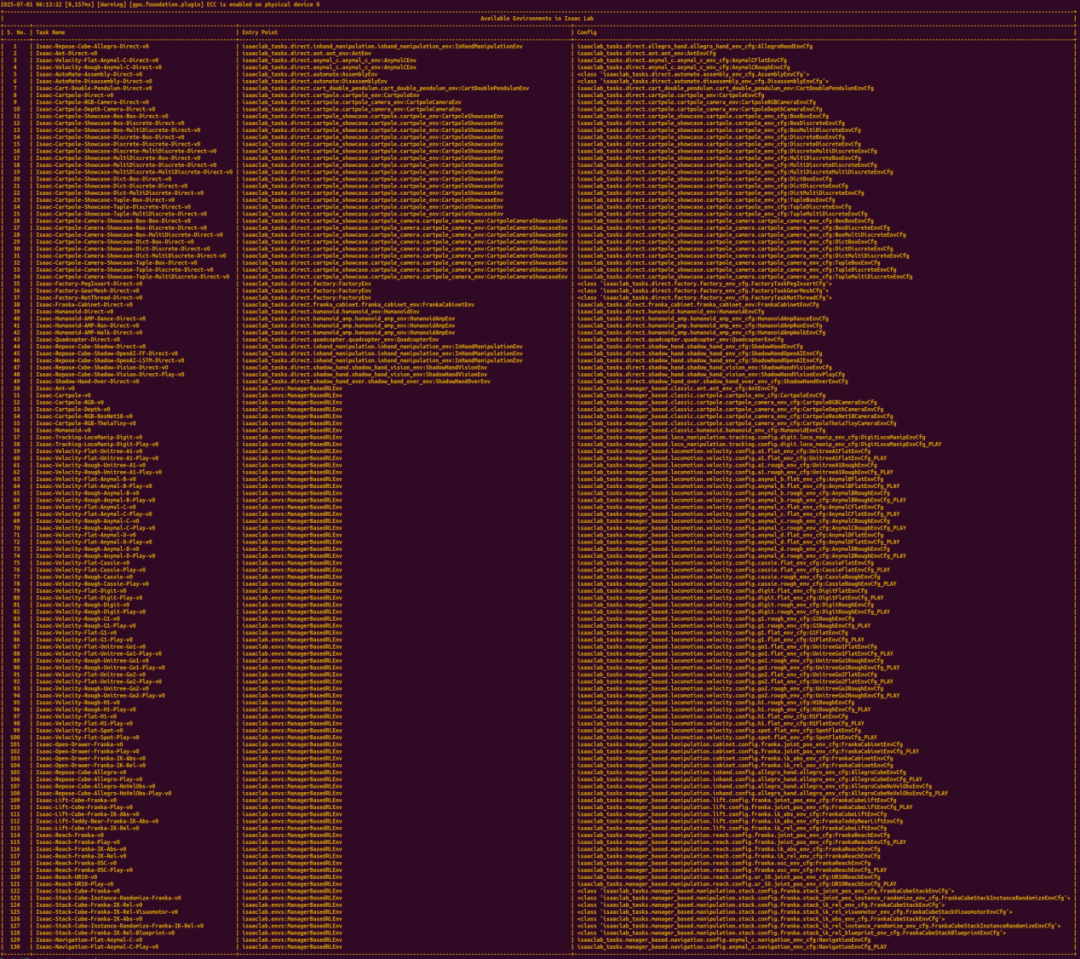
Isaac Lab 提供 7 类强化学习环境,涵盖从基础控制到复杂工业场景的全方位需求:

2025 丽台(上海)信息科技有限公司
本图表由丽台科技制作,如果您有任何疑问或需要使用,
请联系丽台科技
Comprehensive List of Environments
Comprehensive List of Environments 是 Isaac Lab 环境与推理任务的官方对照表,主要解决以下问题:
训练与推理环境分离:部分环境在训练和推理阶段需要不同的配置(如关闭随机扰动、固定目标位置等)
框架兼容性指引:明确每个环境支持的强化学习框架(RL-Games/RSL-RL/SKRL/SB3)及推荐算法
版本控制:确保训练完成的模型能够无缝部署到推理环境
具体每个类别所对应的环境 ID 可以在官网详细获取:
https://isaac-sim.github.io/IsaacLab/main/source/overview/environments.html
(复制链接至浏览器打开)
三、Isaac Lab 强化学习脚本实操
Isaac Lab 提供 30 多个即用型训练环境,支持 RL-Games、RSL-RL、SKRL 和 Stable-Baselines3 等主流强化学习框架,同时支持多智能体强化学习。
提示:
以上强化学习框架均已在安装 Isaac Lab 时一并安装,如果只想安装特定框架,可以将框架的名称作为参数传递。比如:
./isaaclab.sh -i rl_games
./isaaclab.sh -i rsl_rl
./isaaclab.sh -i skrl
./isaaclab.sh -i sb3
基本流程
1. 关键参数说明:
--headless:不进行渲染显示,显卡性能集中提升训练速度
--num_envs:根据 GPU 显存调整(NVIDIA RTX 5880 Ada 建议 128)
--video_length:控制视频时长(默认 200 帧)
2. 所有强化学习框架在 Isaac Lab 中遵循标准化命令格式:
# 1安装框架依赖
./isaaclab.sh -i {框架名}
# 2启动训练任务
./isaaclab.sh -p scripts/reinforcement_learning/{框架名}/train.py
--task {环境ID}
--headless # 无GUI模式
--num_envs {并行数} # 建议值:32-128
# 3模型验证与可视化
./isaaclab.sh -p scripts/reinforcement_learning/{框架名}/play.py
--task {推理环境ID} # 使用Inference Task Name
--checkpoint /path/to/model
--video # 录制视频(需ffmpeg)
# 4使用TensorBoard监控与日志分析
./isaaclab.sh -p -m tensorboard.main --logdir=logs
实操演示
我们本次以 Isaac-Velocity-Rough-G1-v0 为例运行 Demo,通过 Comprehensive List of Environments 可以查询到该环境支持 rsl_rl (PPO)、skrl (PPO) 框架。

1. 使用 RSL-RL 进行训练:
./isaaclab.sh -p scripts/reinforcement_learning/rsl_rl/train.py --task lsaac-Velocity-Rough-G1-v0 --headless --num envs 128 --max iterations 100 --experiment name g1 rough
2. 进行实时渲染测试查看效果:
./isaaclab.sh -p scripts/reinforcement_learning/rsl_rl/play.py --task Isaac-Velocity-Rough-G1-Play-v0 --checkpoint logs/rsl_rl/g1_rough/2025-07-01_16-08-48/model_99.pt --real-time --num_envs 4
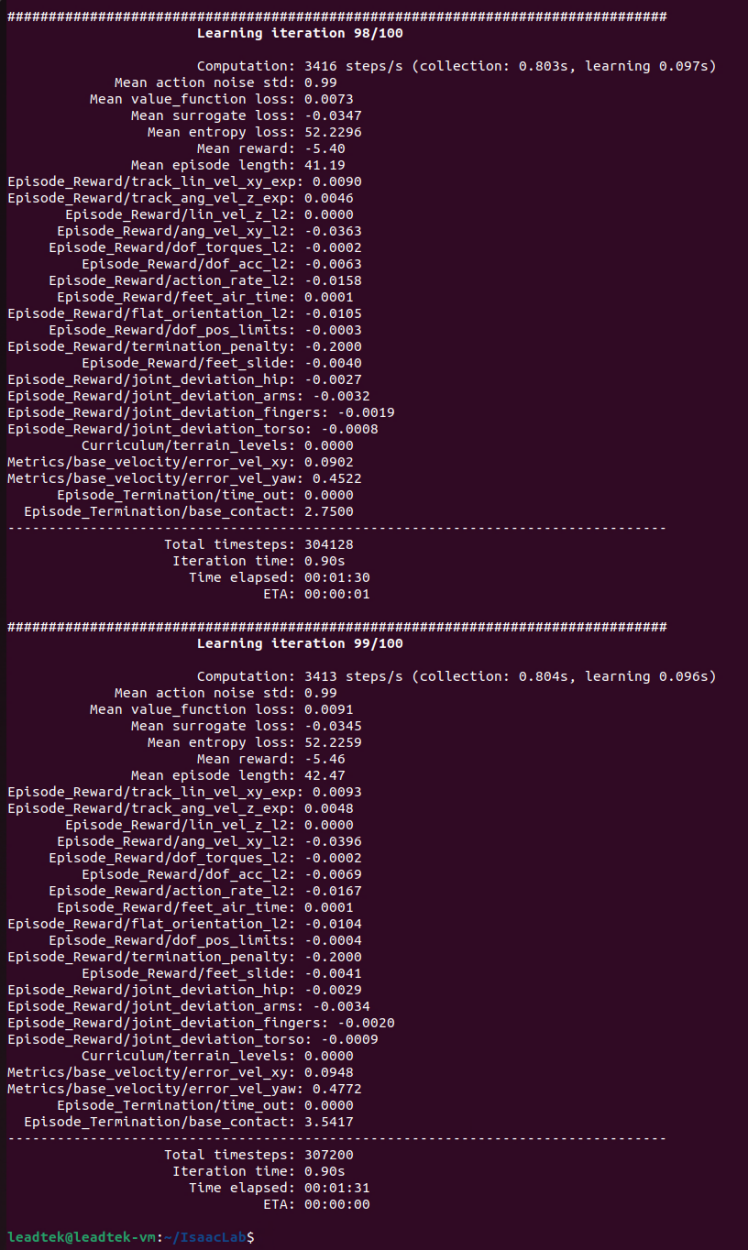
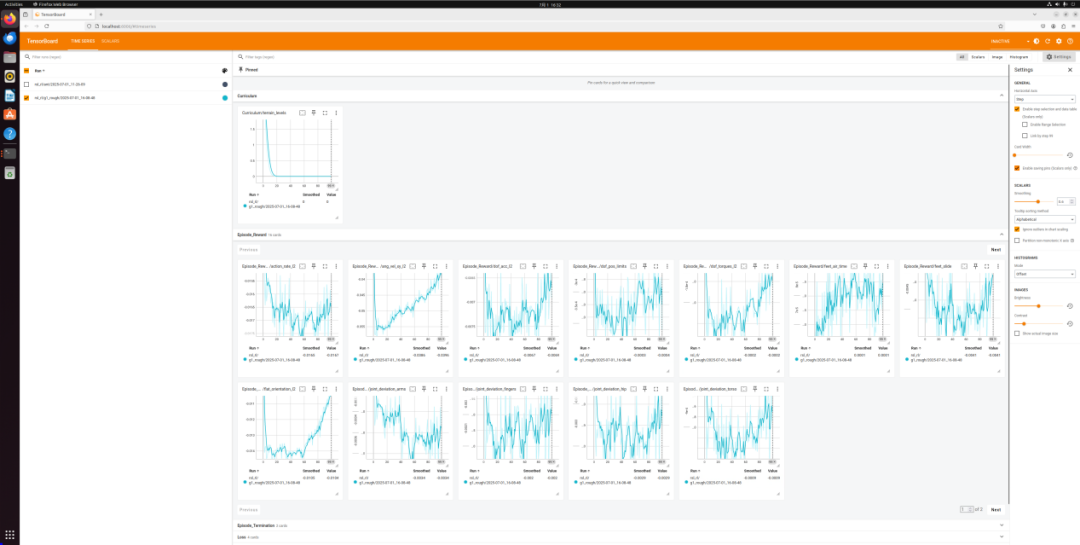
3. 使用 TensorBoard 监控与日志分析:
./isaaclab.sh -p -m tensorboard.main --logdir=logs
4. 最后还可以进行视频录制,具体命令参数如下:
./isaaclab.sh -p scripts/reinforcement_learning/rsl_rl/play.py --task Isaac-Velocity-Rough-G1-Play-v0 --checkpoint logs/rsl_rl/g1_rough/2025-07-01_16-08-48/model_99.pt --headless --video --video_length 500
5. 录制完成后可在对应 log 目录下查看:

四、机器人仿真环境推荐硬件配置
以下是丽台针对个人开发者/研究人员的机器人仿真环境推荐配置,能流畅运行 Isaac Lab 以及机器人训练和仿真所需的算力,同时可再与企业级多卡集群方案形成互补,能够完全满足中小规模的实验需求。

▲ LEADTEK WS3008 工作站
LEADTEK WS3008 产品特性
支持选配 2 张 NVIDIA RTX 5880 Ada GPU
支持单 Intel Xeon W-3400、W-2400 系列处理器
Intel W790 芯片组
支持最高至 350W CPU TDP
支持最多 DDR5-4800MHz x8 内存
支持 4 PCIe 5.0 x16 插槽
支持 1 M.2 NVMe PCI-E 4.0 x4
支持 2 个 10GbE BaseT、1 个 2.5GbE BaseT 和 1 个 1GbE BaseT 网口
支持 1 个 IPMI 管理口
支持 2 个 USB-A
支持 1 个 VGA 口,1 个 COM 口
支持 1 个 1200W/1300W 铂金电源
机箱体积:400.0×278.0×167.6 mm
-
使用Isaac Gym 来强化学习mycobot 抓取任务2023-04-11 10094
-
反向强化学习的思路2019-04-03 2475
-
深度强化学习实战2021-01-10 2947
-
将深度学习和强化学习相结合的深度强化学习DRL2018-06-29 28843
-
人工智能机器学习之强化学习2018-05-30 1858
-
什么是强化学习?纯强化学习有意义吗?强化学习有什么的致命缺陷?2018-07-15 18771
-
机器学习中的无模型强化学习算法及研究综述2021-04-08 1411
-
如何使用 PyTorch 进行强化学习2024-11-05 1907
-
坚米智能借助NVIDIA Isaac Lab加速四足机器人开发2024-12-29 2724
-
NVIDIA技术驱动帕西尼触觉感知与人形机器人智能突破2025-04-21 1682
-
NVIDIA Isaac Sim与NVIDIA Isaac Lab的更新2025-05-28 2579
-
NVIDIA Isaac Sim 4.5.0与lsaac Lab 2.0的安装教程2025-06-19 3638
-
NVIDIA Isaac Sim和Isaac Lab现已推出早期开发者预览版2025-07-04 2225
-
NVIDIA Isaac Lab多GPU多节点训练指南2025-09-23 2808
-
NVIDIA Isaac Lab推动机器人技术突破2025-10-21 1501
全部0条评论

快来发表一下你的评论吧 !
